其实风险评估就是在充分掌握资料的基础之上,采用合适的方法对已识别风险进行系统分析和研究,评估风险发生的可能性(概率)、造成损失的范围和严重程度(强度),为接下来选择适当的风险处理方法提供依据。今天老徐给大家介绍介绍常用的一些风险评估方法。
一、专家调查法
在风险识别的基础之上,请专家对风险因素的发生概率和影响程度进行评价,再综合整体风险水平进行评价。老徐认为这类方法简单易行,但是大家在分析的时候最好是在采用德尔菲法进行风险识别时同时进行,这样可以极大的节约成本和时间,但是其自身的缺点也比较明显,主观性强,可能会过度依赖于专家水平。
二、蒙特卡洛模拟法
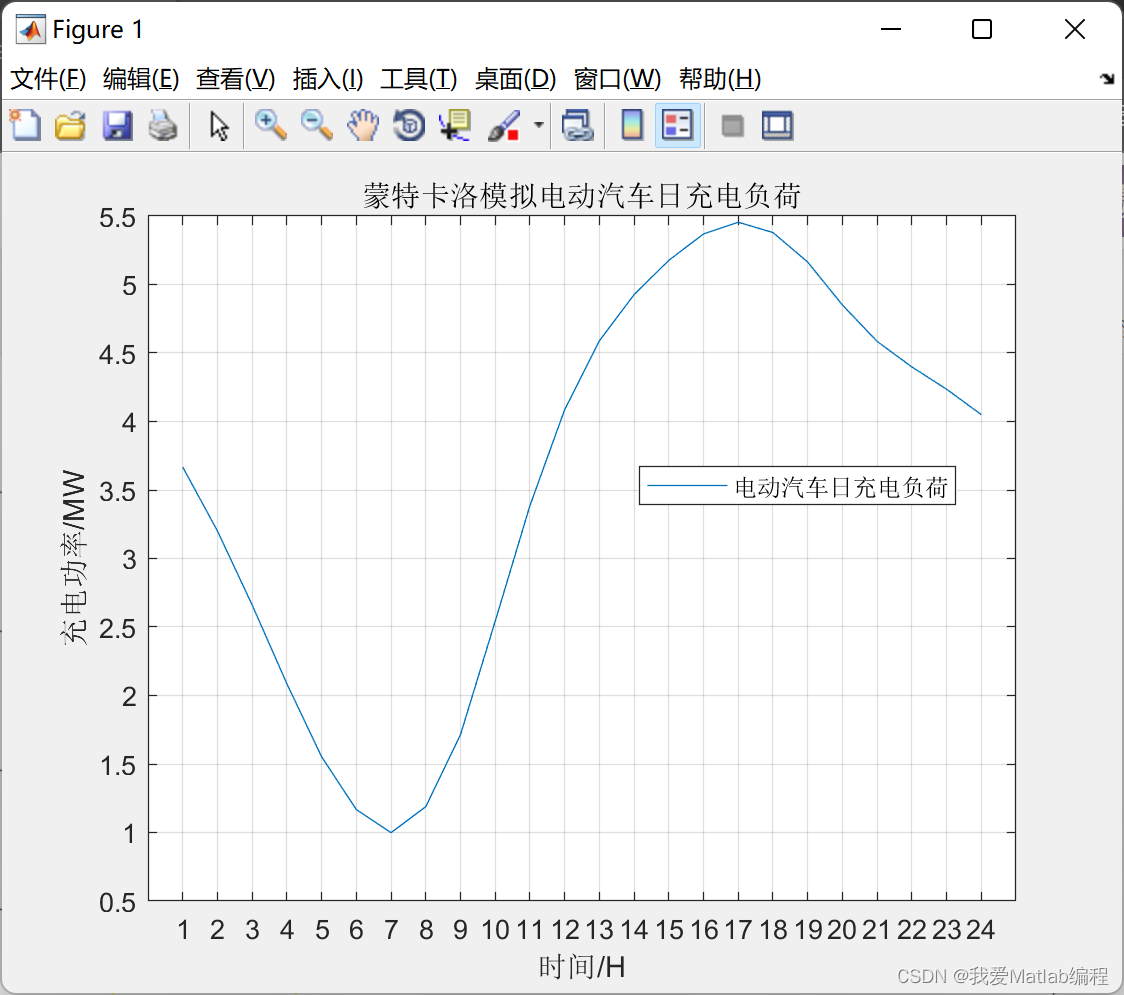
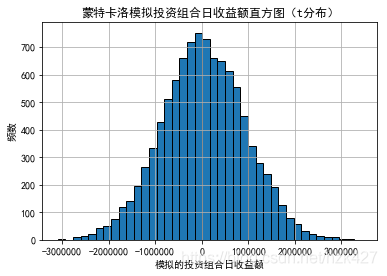
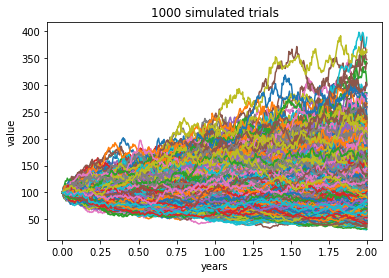
蒙特卡洛模拟法的原理是将项目目标变量和各个风险变量综合在一个数学模拟模型内,每个风险变量用一个概率分布来描述,然后利用计算机产生随机数,并根据随机数在各个风险变量的概率分布中取值,算出目标变量值,经过多次运算即可得出目标变量的期望值、方差、概率分布等指标,绘制累计概率图,供决策者参考。老徐认为这种方法的优点是使用计算机模拟项目的自然过程,比历史模拟方法成本低,结果相对精确;可以处理多个因素非线性、大幅波动的不确定性,并把这种不确定性的影响以概率分布形式表示出来,克服了敏感性分析的局限性。不足之处是依赖于特定的随机过程和选择的历史数据,不能反映风险因素之间的相互关系,需要有可靠的模型,否则导致错误。
三、计划评审技术(PERT)
该方法是用网络图来体现项目中各项活动的进度和相互之间的关系,确定关键路径,计算总工期及概率,再综合考虑资源因素,得到最佳的项目计划方案。PERT主要用于对项目的进度管理,评价进度和费用方面的风险。它适用于评价缺乏历史经验资料的科研或产品研发项目风险以及与进度相关的项目风险。由于该方法的前提是假设项目每项活动的时间服从正态分布或β分布,总工期和关键路径都具有随机性,但是随着关键路径的确定,这一假设就失去意义,因此具有一定的缺陷。
四、敏感性分析法
敏感性分析法是指在假定其他风险因素不变的情况下,评估某一个(或几个)特定的风险因素变化对项目目标变量的影响程度,确定它的变动幅度和临界值,计算出敏感系数,据此对风险因素进行敏感性排序,供决策者参考。这种方法应用广泛,常用于项目的可行性研究阶段,有助于发现重要的风险因素,具体又可分为单因素敏感性分析和多因素敏感性分析。其缺点在于只能体现风险因素的强度而不能反映发生概率,也不能反映众多风险因素同时变化时对项目的综合影响。
五、决策树法
决策树法是指利用图解的形式,将风险因素层层分解,绘制成树状图,逐项计算其概率和期望值,进行风险评估和方案的比较和选择。这种方法层次清晰,不同节点面临的风险及概率一目了然,不易遗漏,能够适应多阶段情形下的风险分析,但用于大型复杂项目时工作量较大,也不适合用于缺乏类似客观数据的项目。
六、影响图法
影响图是指由风险结点集合和反映风险关系的有向弧集合构成的无环有向图,它是在决策树基础之上发展起来的图形描述工具,这种方法优点是概率估计、备选方案、决策者偏好等资料完整;图形直观、概念明确;计算规模随着风险因素个数呈线性增长。缺点是需要获取大量的概率和效用值,对于复杂问题建模困难。
七、模糊综合评价法
风险也具有模糊性,主要表现为风险的强度或大小很难进行明确的界定。模糊综合评价法将项目风险大小用模糊子集进行表达,利用隶属度及模糊推理的概念对风险因素进行排序,以改进的模糊综合评价法为基础,采用层次分析法(AHP)构建风险递阶层次结构,采用专家调查法确定各层次内的风险因素指标权重。
补充说明:
多标签分类的评价指标
多标签分类作为多分类的一种推广,每个样本可以有多个类别,如下图的标签为:sea,sunset。所以其评价指标与多分类的也有差异,本文将介绍几种评价指标。

1.Hamming loss(汉明损失),表示所有label中错误样本的比例,所以该值越小则网络的分类能力越强。计算公式如下。

其中:|D|表示样本总数,|L|表示标签总数,xi和yi分别表示预测结果和ground truth。xor表示异或运算。
样例:




- from sklearn.metrics import hamming_loss
- y_pred = [1, 2, 3, 4]
- y_true = [2, 2, 3, 4]
- hamming_loss(y_true, y_pred) #输出结果为0.25
-
- hamming_loss(np.array([[0, 1], [1, 1]]), np.zeros((2, 2))) #输出结果为0.75
2. Jaccard index(杰卡德指数),概念挺陌生,公式是再熟悉不过了。其中:T表示ground truth,P表示预测结果。再观察这个公式,和检测算法中的IOU多么相近。

3. 精度、召回率和F1值。其中精度计算公式为

4. 准确匹配。这个是最严格的标准了,是预测结果和ground truth完全一致时的样本数与总的样本数的比值。
参考文献:https://en.wikipedia.org/wiki/Multi-label_classification