本节我们主要去讲解一下多种PSO模式原理和使用的讲解,用户可根据实际需求灵活选择触发模式。

一.硬件说明
硬件选型的首要要求是支持PSO功能,再分析PSO的应用场合和轴数等选择具体的型号。本例以ZMC460N双总线运动控制器为例展开介绍。
PSO功能用于控制激光或点胶阀的高速开/关,直线插补和平面圆弧插补功能用于完成加工轨迹,连续插补功能用于让多段插补的速度连续,提供加工的效率。
ZMC460N双总线控制器
ZMC460N双总线控制器是正运动技术推出的新一代网络60轴运动控制器(支持EtherCAT总线轴+RTEX总线轴+脉冲轴混合使用),自带六个脉冲轴接口(包含差分脉冲输出和差分编码器输入),通用输出口支持配置为单端脉冲输出,通用输入口支持配置成单端编码器输入。脉冲输出频率最大可达10MHZ,EtherCAT总线的通讯周期最快可达250微秒。
支持12路PSO输出,输出口独立,支持12路同时输出,每个系统周期可比较输出多次,应用场景更为丰富。

PSO功能主要通过“HW_PSWITCH2”硬件位置比较输出指令和“HW_TIMER”硬件定时指令实现,下面来讲解一下这两个指令的详细用法。
二.指令说明
1.HW_PSWITCH2 --硬件位置比较输出
(1)指令说明
硬件位置比较输出功能必须使用支持硬件比较输出的输出口,例如ZMC460N可以使用OUT0-11口。
支持比较脉冲轴的位置、编码器的反馈位置和总线轴的位置。比较主轴带编码器输入时,自动使用编码器位置来触发,不带编码器的场合便比较脉冲输出。可以使用MOVEOP_DELAY参数来调整输出准确时刻。
(2)注意事项
ZMC460N每个系统周期内可以比较一次,但每个周期内单个输出口只能比较一次,系统周期通过“SERVO_PERIOD”查询,当系统周期过大时,而比较输出脉冲宽度小于系统周期时将会导致输出异常。
“HW_PSWITCH2”与“MOVE_OP”精准使用同样的硬件资源,不建议在同一个通道同时使用,可以在不同的通道同时使用。
调用TABLE位置数据时,在所有比较点完成前不要修改。
使用脉冲型电机时只有ATYPE为4时才是比较反馈位置(MPOS),默认出厂的ATYPE为1或7比较的是命令位置(DPOS)。
HW_PSWITCH2没有比较完所有点的话,一定要设置mode值为2,通过HW_PSWITCH2(2)指令停止并删除没有完成的比较点,否则后面此输出通道会工作不正常,使用前需要调用此模式,清除可能没有比较完成的数据。
(3)指令语法
HW_PSWITCH2(mode, […])
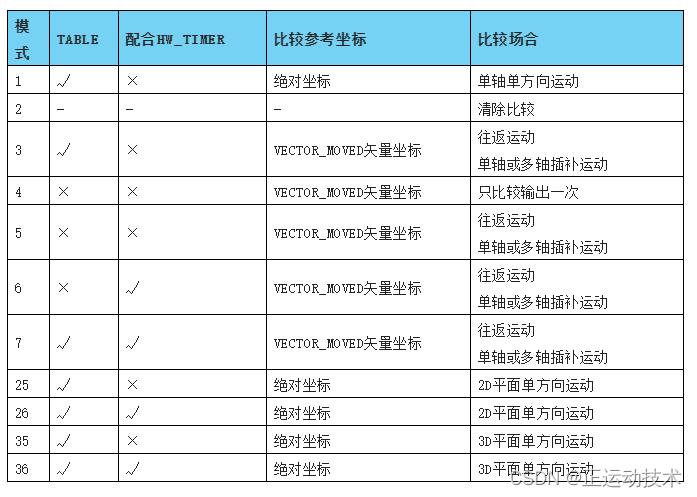
A.Mode模式一览表:
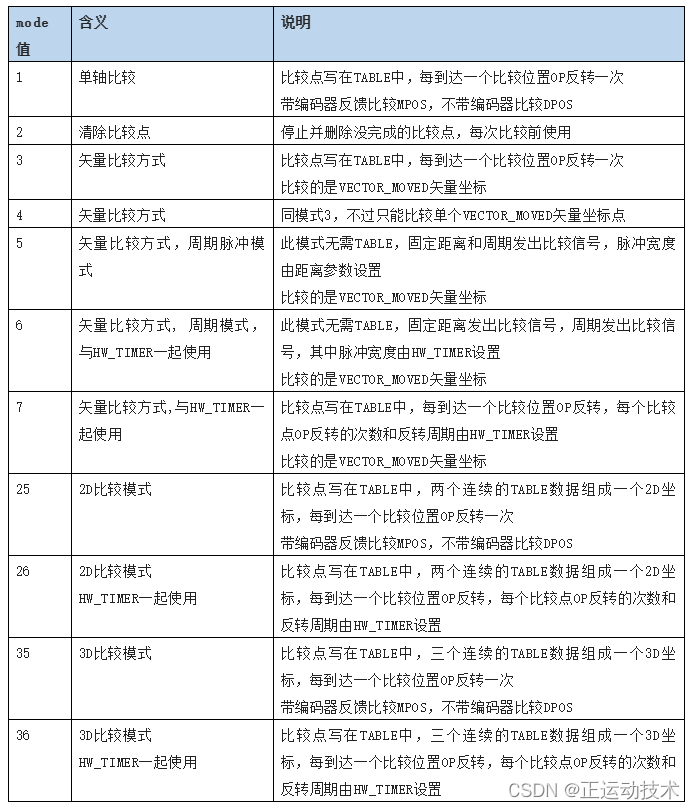
B.HW_PSWITCH2的模式可以总结为两大类:
a.采用TABLE表存储的数据点来进行比较,脉冲宽度由数据的间隔和运动速度共同决定,所以比较前先要将数据写入“TABLE”中,然后再调用。
相关模式:1,3,7,25,26,35,36。
b.等距周期比较,无需借助“TABLE”,“HW_PSWITCH2”设置好触发的比较的位置、比较周期数,“HW_TIMER’设置每次触发比较输出脉冲的宽度,这类模式参数设置相对多一些,多个指令的组合也可实现变化距离的输出。
相关模式:6。模式5既不需要TABLE也不需要“HW_TIMER”便可实现等距周期比较。

Mode模式详解参加下文,mode模式不同,后面需要填写的参数也不同。
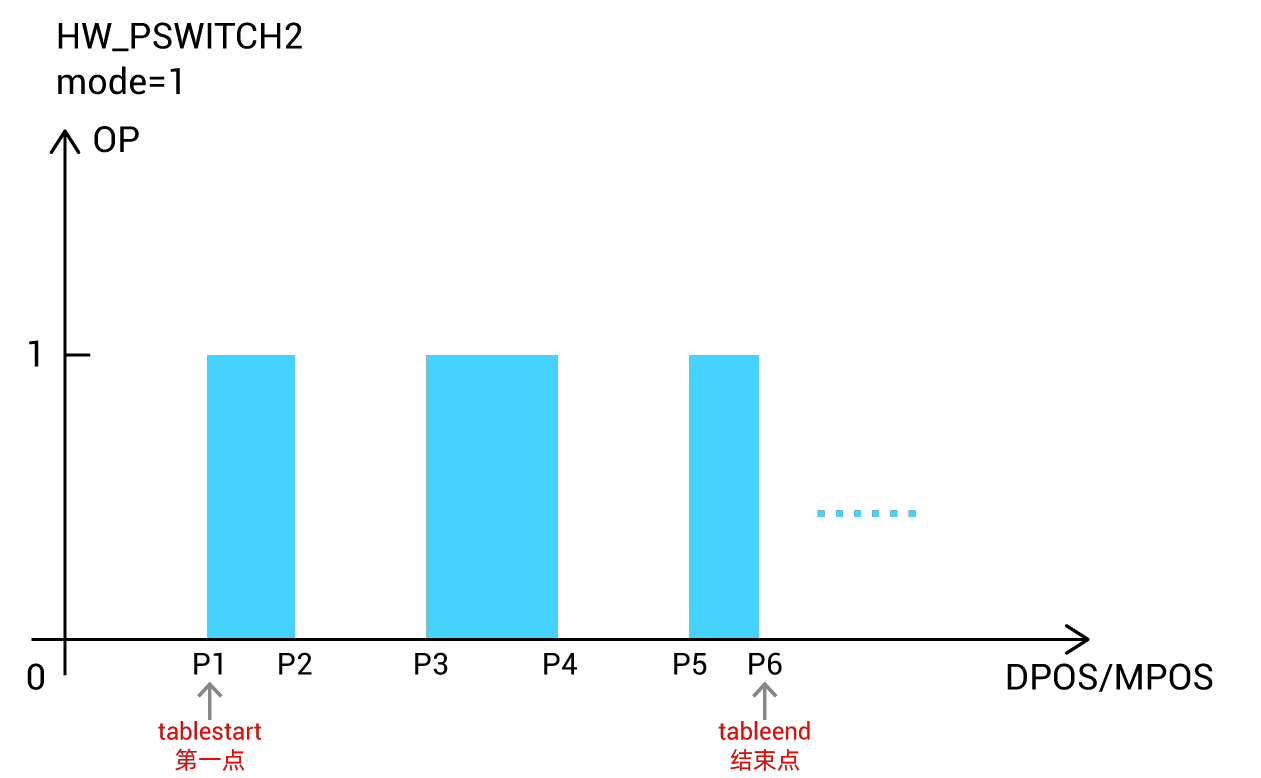
(4) Mode=1:单轴比较
HW_PSWITCH2(1,opnum,opstate,tablestart,tableend[,direction])
mode:1-启动比较器
opnum:对应的输出口
opstate:第一个比较点的输出状态
tablestart:第一个比较点绝对坐标所在TABLE编号
tableend:最后一个比较点绝对坐标所在TABLE编号
direction:第一个点判断方向,0坐标负向,1坐标正向,-1不使用方向
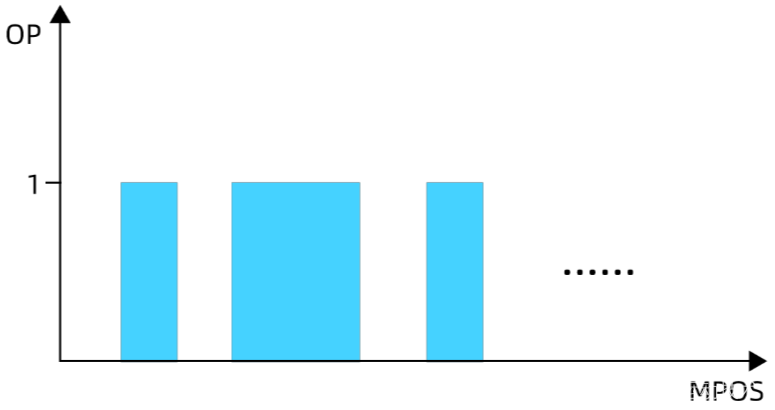
⊙说明: 比较点写在TABLE中,每到达一个比较位置OP反转一次。
(5) Mode=2:清除比较点
HW_PSWITCH2(2)
mode:2-停止并删除没完成的比较点
⊙说明: 使用前需要调用此模式,清除可能没有比较完成的数据。使用过程中也可以发送此命令,停止比较。
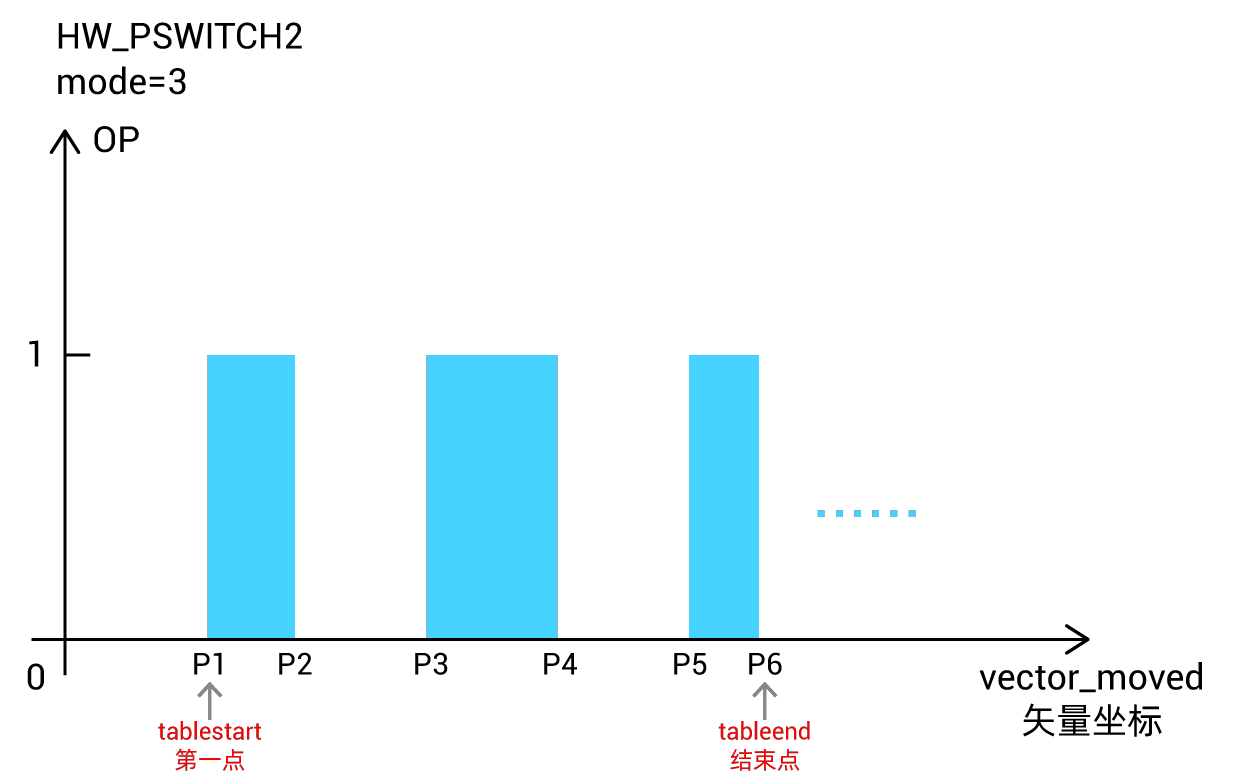
(6) Mode=3: 矢量比较方式
HW_PSWITCH2(3, opnum, opstate, tablestart, tableend)
mode:3-启动比较器
opnum:对应的输出口
opstate:第一个比较点的输出状态
tablestart:第一个比较点VECTOR_MOVED坐标所在TABLE编号
tableend:最后一个比较点VECTOR_MOVED坐标所在TABLE编号
⊙ 说明:比较点写在TABLE中,每到达一个比较矢量位置OP反转一次。
使用矢量距离比较时,与“VECTOR_MOVED”进行比较,建议连续运动前设置“VECTOR_MOVED”初始值。
(7) Mode=4: 矢量比较方式,单个比较点
HW_PSWITCH2(4, opnum, opstate, vectstart)
mode:4-启动比较器
opnum:对应的输出口
opstate:第一个比较点的输出状态
vectstart:比较点VECTOR_MOVED当前运动距离
⊙ 说明:到达指令设置的一个比较矢量位置OP反转,比较结束。

(8) Mode=5: 矢量比较方式, 周期脉冲模式
HW_PSWITCH2(5,opnum, opstate, vectstart, repes, cycledis, ondis)
mode:5-启动比较器
opnum:对应的输出口
opstate:第一个比较点的输出状态,认为是有效状态,反之认为无效状态
vectstart:比较点VECTOR_MOVED当前运动距离
repes:重复周期,个周期内比较两次,先输出有效状态,再输出无效状态
cycledis:周期距离,每隔这个距离输出opstate, ondis后还原为无效状态
ondis:输出有效状态的距离,(cycledis- ondis)为无效状态距离
⊙说明:此模式无需TABLE,坐标均参考矢量坐标,从vectstart的位置开始比较,每隔cycledis距离触发一次比较,重复比较的周期为repes,每次触发比较信号后,保持ondis距离后关闭信号,等待下一周期的触发。

(9) Mode=6: 矢量比较方式, 周期脉冲模式
⊙与HW_TIMER一起使用
HW_PSWITCH2(6, opnum, opstate, vectstart, repes, cycledis)
mode:6-启动比较器
opnum:对应的输出口
opstate:第一个比较点的输出状态
vectstart:比较点VECTOR_MOVED当前运动距离
repes:重复周期,一个周期只比较一次
cycledis:周期距离,每隔这个距离输出一次
⊙ 说明: 此模式无需TABLE,坐标均参考矢量坐标,从vectstart的位置开始比较,每隔cycledis距离触发一次比较,重复比较的周期为repes,每次触发比较信号后,保持信号的脉冲宽度由“HW_TIMER”指令设置。
“HW_TIMER”可以控制到达一个触发点控制OP反转多次,“HW_TIMER”周期完成等待下一周期的触发。

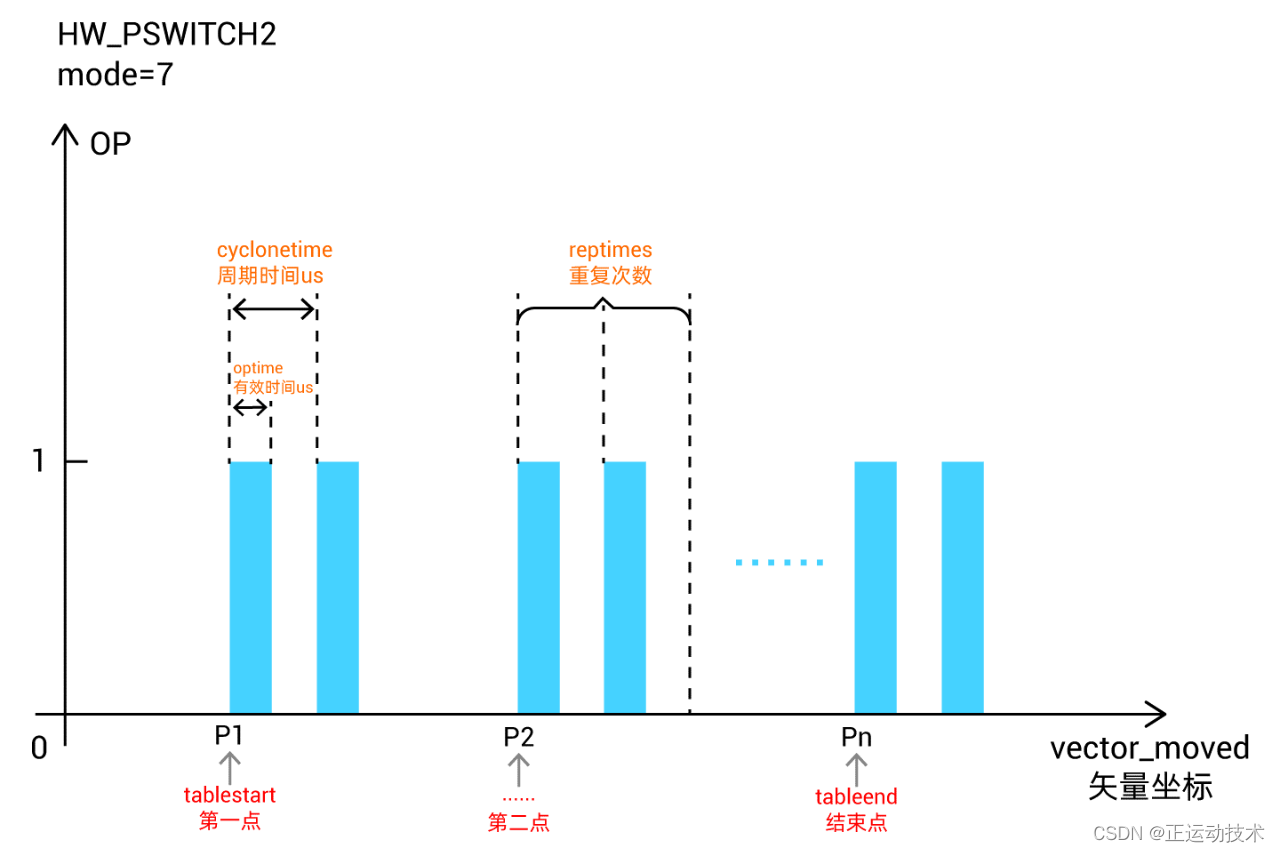
(10) Mode=7: 矢量比较方式
⊙ 与HW_TIMER一起使用
HW_PSWITCH2(7,opnum,opstate, tablestart, tableend [, optimeus, optimes, cyctimeus])
mode:7-启动比较器,opstate不翻转,方便与HW_TIMER配合使用
opnum:对应的输出口
opstate:第一个比较点的输出状态
tablestart:第一个比较点VECTOR_MOVED坐标所在TABLE编号
tableend:最后一个比较点VECTOR_MOVED坐标所在TABLE编号
[以下参数和HW_TIMER二选一,HW_TIMER单独写可以动态调整参数]
optimeus:动态调整HW_TIMER的有效时间
optimes:动态调整HW_TIMER的触发脉冲数,0-不输出
cyctimeus:动态调整HW_TIMER的脉冲周期时间
⊙ 说明:比较点写在TABLE中,坐标均参考矢量坐标,每到达一个TABLE比较矢量位置触发OP,此时OP的脉冲宽度和每次触发的比较次数由HW_TIMER控制;到达下一个TABLE位置,OP再次触发。
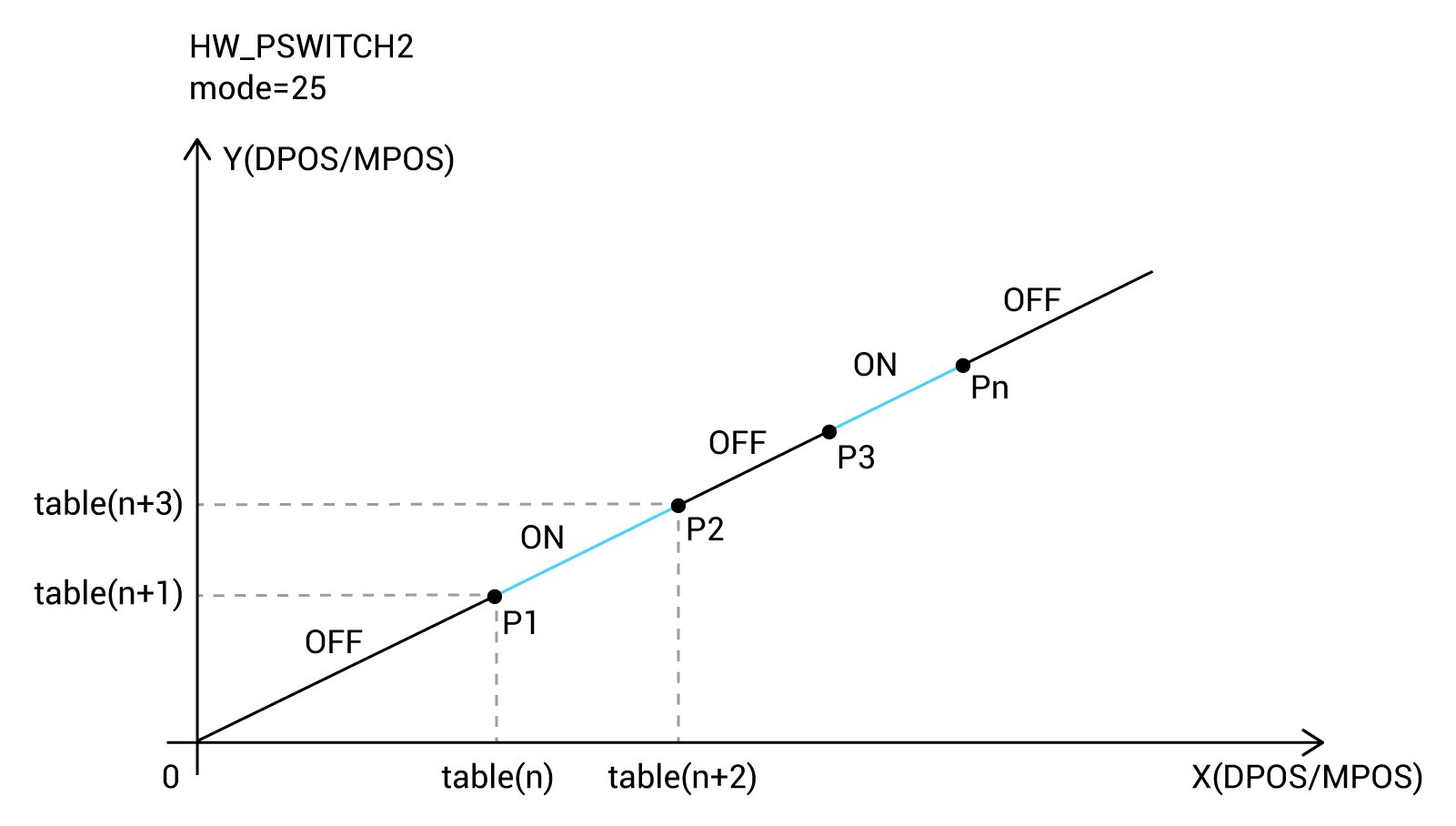
(11) Mode= 25、26:2D比较
2D比较: 每2个连续table存储一个XY坐标点,实现多点比较,每个比较点输出状态翻转。
25和35模式类似;26和36模式类似,需与HW_TIMER配合使用。
A.HW_PSWITCH2(25, opnum, opstate, maxerr, num, tablepos)
mode:25,二维的比较模式
opnum:对应的输出口
opstate:第一个比较点的输出状态
maxerr:比较位置每个轴左右的脉冲偏差,进入偏差范围后开始比较,此参数不能写0
num:table里面存储的比较点坐标个数
tablepos:第一个比较点坐标所在table编号
⊙ 说明:比较点写在TABLE中,两个连续的TABLE数据组成一个2D坐标,每到达一个比较位置OP反转一次。
示意中蓝色段表示OP开启,各类常用插补运动均支持比较,比较点坐标一定的要准确,否则会影响后面点的比较。
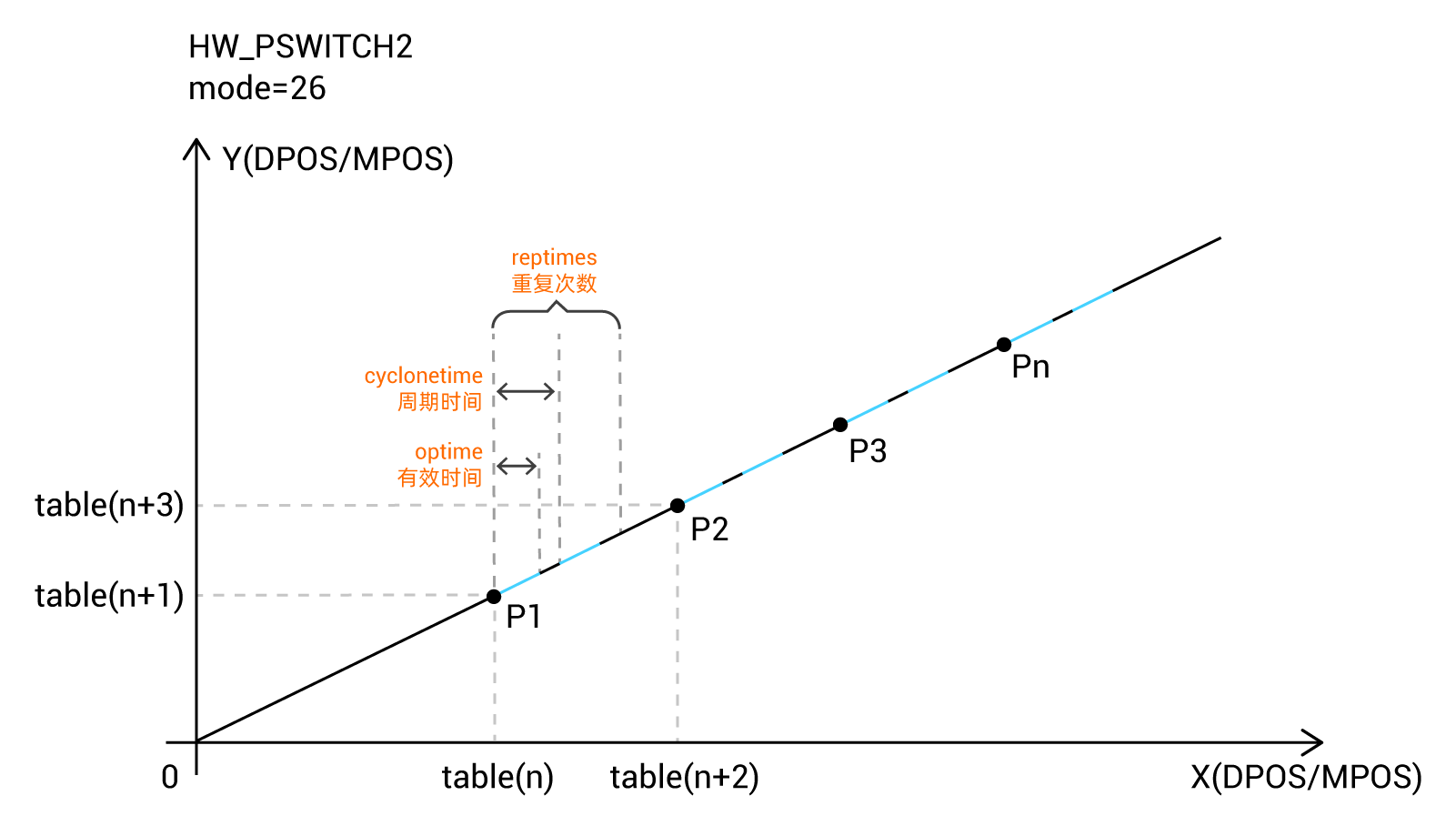
B.HW_PSWITCH2(26, opnum, opstate, maxerr, num, tablepos, [ophwtimeus, ophwtimes, hwcyctimeus])
mode:26,二维的比较模式
opnum:对应的输出口
opstate:第一个比较点的输出状态
maxerr:比较位置每个轴左右的脉冲偏差,进入偏差范围后开始比较,此参数不能写0
num:table里面存储的比较点坐标个数
tablepos:第一个比较点坐标所在table编号
[以下参数和HW_TIMER二选一,HW_TIMER单独写可以动态调整参数]
ophwtimeus:脉冲时间
ophwtimes:脉冲个数
hwcyctimeus:脉冲周期
⊙ 说明:比较点写在TABLE中,两个连续的TABLE数据组成一个2D坐标,每到达一个比较位置触发OP,每个比较点OP反转的次数和反转周期由HW_TIMER设置;到达下一个TABLE位置,OP再次触发。类似模式7和模式36。
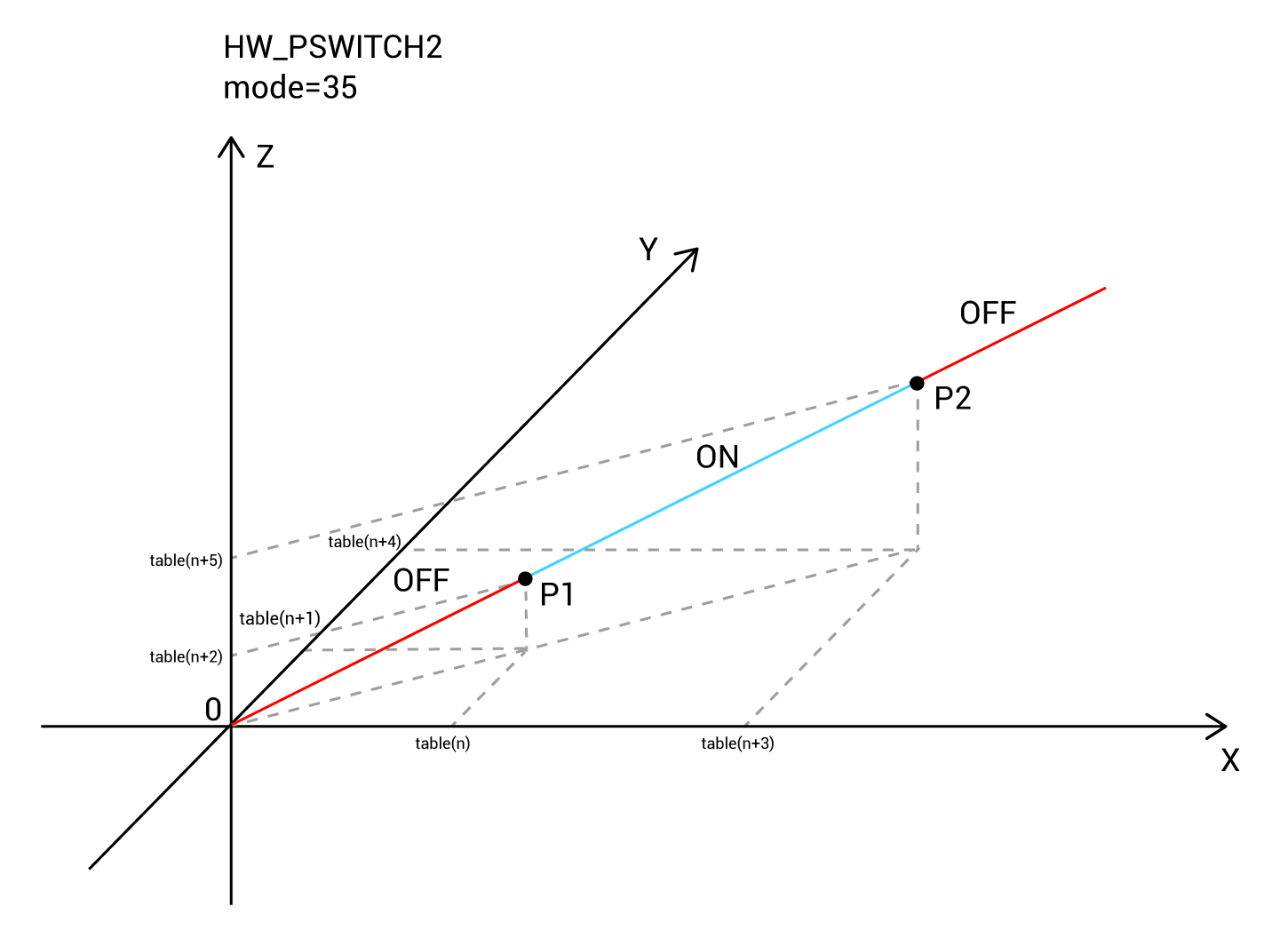
(12) Mode= 35、36:3D比较
3D比较: 每3个连续TABLE存储一个XYZ坐标点,实现多点比较,每个比较点输出状态翻转。
25和35模式类似;26和36模式类似,需与HW_TIMER复用。
A.HW_PSWITCH2(35, opnum, opstate, maxerr, num, tablepos)
mode:35,三维的比较模式
opnum:对应的输出口
opstate:第一个比较点的输出状态
maxerr:比较位置每个轴左右的脉冲偏差,进入偏差范围后开始比较,此参数不能写0
num:table里面存储的比较点坐标个数
tablepos:第一个比较点坐标所在table编号
⊙ 说明:比较点写在TABLE中,三个连续的TABLE数据组成一个3D坐标,每到达一个比较位置OP反转一次。 类似模式25。
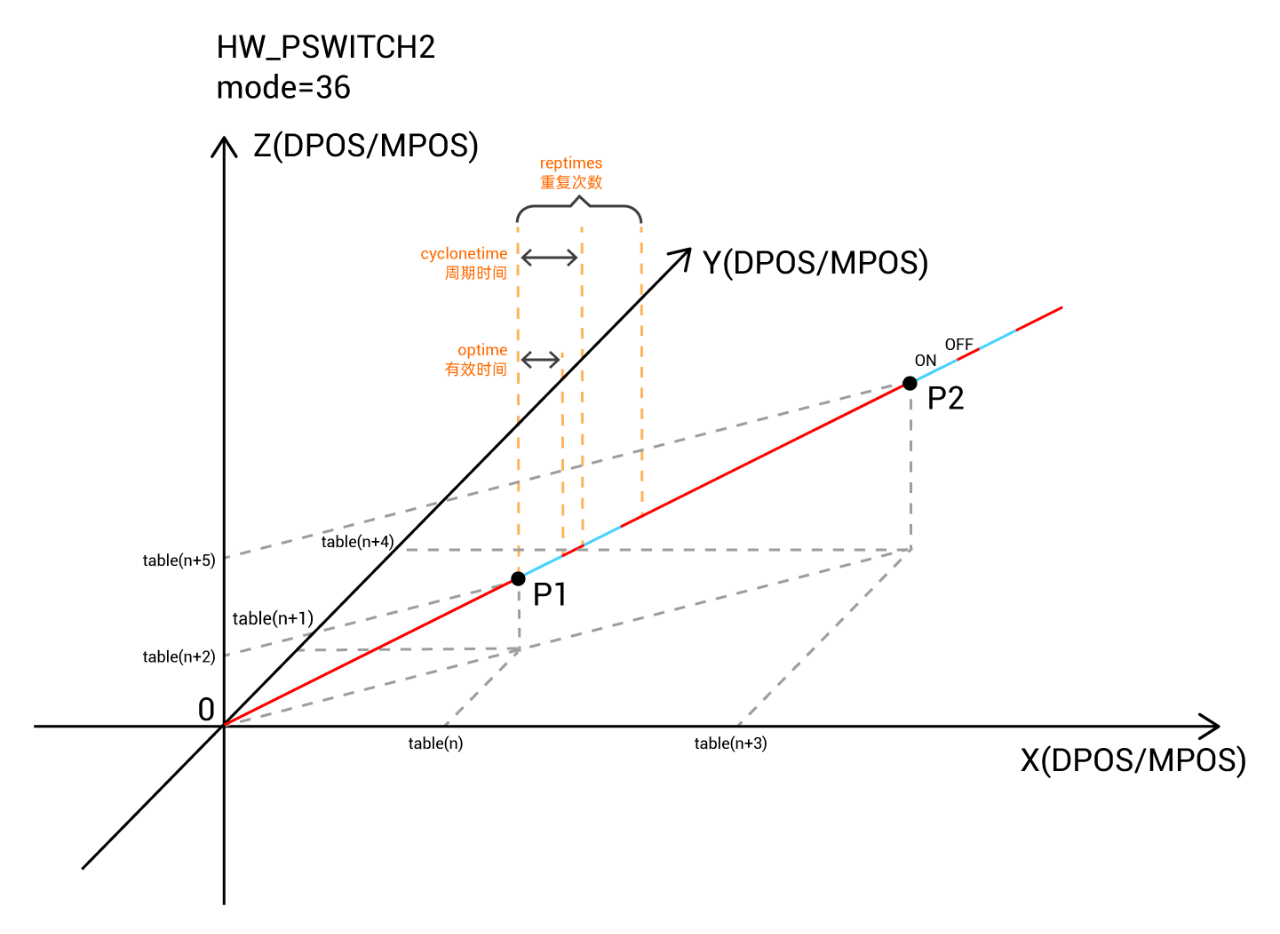
B.HW_PSWITCH2(36, opnum, opstate, maxerr, num, tablepos, [ophwtimeus, ophwtimes, hwcyctimeus])
mode:35,36,三维的比较模式
opnum:对应的输出口
opstate:第一个比较点的输出状态
maxerr:比较位置每个轴左右的脉冲偏差,进入偏差范围后开始比较,此参数不能写0
num:table里面存储的比较点坐标个数
tablepos:第一个比较点坐标所在table编号
[以下参数和HW_TIMER二选一,HW_TIMER单独写可以动态调整参数]
ophwtimeus:脉冲时间
ophwtimes:脉冲个数
hwcyctimeus:脉冲周期
⊙ 说明:比较点写在TABLE中,三个连续的TABLE数据组成一个3D坐标,每到达一个比较位置触发OP,每个比较点OP反转的次数和反转周期由HW_TIMER设置;到达下一个TABLE位置,OP再次触发。类似模式26和模式7。
→maxerr脉冲偏差 说明
2D模式下设置XY坐标需要准确,轴运动不到准确的TABLE比较点时将无法触发,3D模式同理。故多维比较模式引入一个特殊参数maxerr位置范围偏差,左右范围均有效。
即实际位置坐标点与TABLE的比较点的差值在maxerr范围内便有效,触发时刻为当前位置进入比较点的触发范围内便触发比较,比较范围示意图如下,注意:maxerr的单位为脉冲数的偏差,不是距离的偏差。

2. HW_TIMER – 硬件定时
硬件定时器,用于硬件比较输出后一段时间后还原电平。“HW_TIMER”只有1个,每次调用会强制停止之前的调用。
不使用或比较完成时使用“HW_TIMER(0)”关闭。
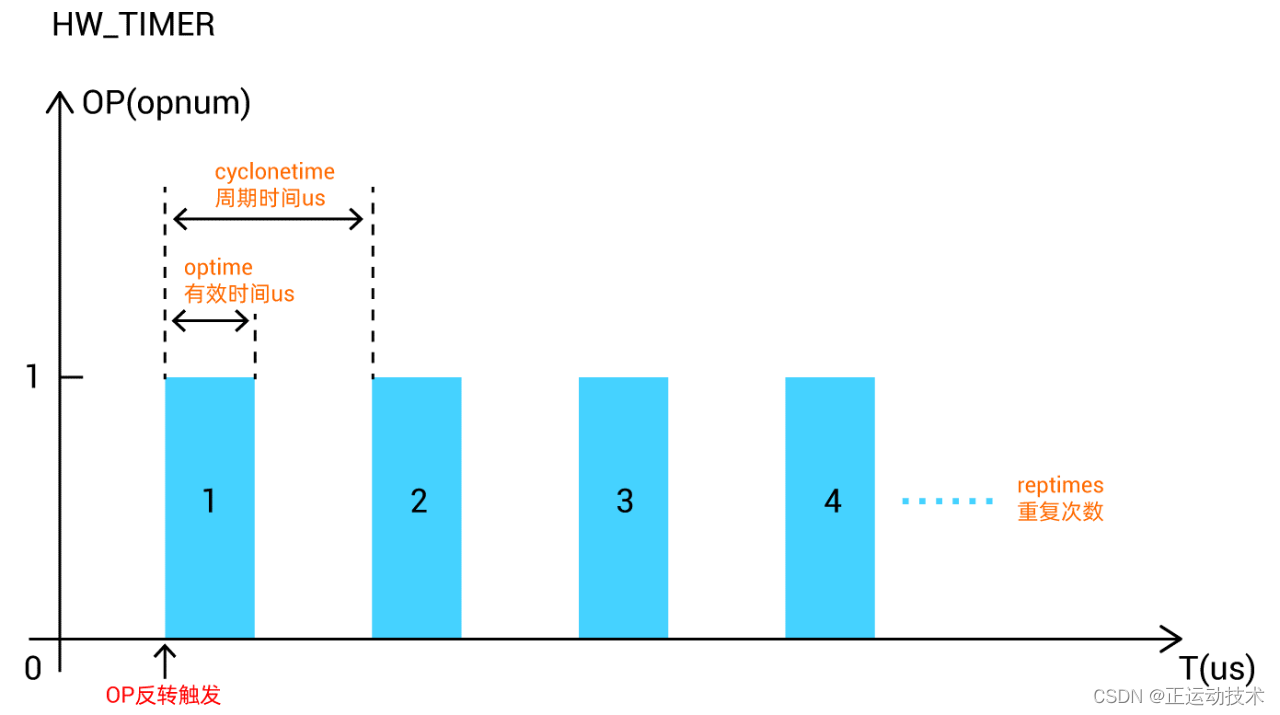
HW_TIMER(mode, cyclonetime, optime, reptimes, opstate, opnum )
mode:0停止,2-启动
cyclonetime:周期时间,us单位
optime:有效时间,us单位
reptimes:重复次数,启动模式,reptimes =0时,软关闭HW_TIMER,原来的脉冲没有完成的,会继续输出完成
opstate:输出缺省状态,输出口变为非此状态后开始计时
opnum:输出口编号,必须能硬件比较输出的口
⊙ 说明:参数设置可参考下方示意图,此指令的效果是固定时间周期输出,设置每个周期的有效输出的时间和重复输出的次数。
→不同模式特点的比较:
配合“HW_TIMER”使用的模式,脉冲输出的宽度由“HW_TIMER”指令指定。
绝对坐标是指当前位置相对于原点的坐标,矢量坐标是指,轴回原点之后,运动到当前位置的总距离,矢量坐标只会不断累计,使用前最好手动清零。
例如轴0回零后先正向运动200,在反向运动100,此时的绝对坐标为100,但矢量坐标为300,若执行两轴插补运动,则矢量坐标为当前插补运动的合成轨迹的矢量,故矢量比较的模式,支持多轴的场合。
⊙带编码器反馈自动比较MPOS,不带编码器比较DPOS。
三.调试例程
以上模式的实现例程如下,可以自由触发不同的模式,并打开示波器,直观的观察PSO的输出随运动的变化情况。
⊙注意: 调用“HW_PSWITCH2”触发比较输出前,先发送“HW_PSWITCH2(2)”停止并删除没有完成的比较点,防止本次的输出异常。并且使用了硬件定时器“HW_TIMER”之后,建议发送“HW_TIMER(0)”关闭定时器。
例程如下:
RAPIDSTOP(2)WAIT IDLE(0)WAIT IDLE(1)WAIT IDLE(2)'基础轴参数设置BASE(0,1,2) '选择XY轴ATYPE=1,1,1 '1-脉冲轴类型,比较DPOS;4-带编码器反馈轴类型,比较编码器的反馈位置MPOSUNITS=100,100,100SPEED=100,100,100ACCEL=1000,1000,1000DECEL=1000,1000,1000MERGE=ON,ON,ONSRAMP=50,50,50 's曲线速度平滑OP(0,OFF) '初始化关闭PSO使用的输出口VECTOR_MOVED = 0 '插补矢量距离清0global g_cmd '比较模式选择g_cmd = 0while 1 '测试所有比较模式if g_cmd = 1 THENg_cmd = 0Clean_Pos() '位置清零Test_Mode1() '调用比较 elseif g_cmd = 3 THENg_cmd = 0Clean_Pos()Test_Mode3()elseif g_cmd = 4 THEN g_cmd = 0Clean_Pos()Test_Mode4() elseif g_cmd = 5 THEN g_cmd = 0Clean_Pos()Test_Mode5()elseif g_cmd = 6 THEN g_cmd = 0Clean_Pos()Test_Mode6()elseif g_cmd = 7 THEN g_cmd = 0Clean_Pos()Test_Mode7() elseif g_cmd = 25 THEN g_cmd = 0Clean_Pos()Test_Mode25()elseif g_cmd = 26 THEN g_cmd = 0Clean_Pos()Test_Mode26()elseif g_cmd = 35 THEN g_cmd = 0Clean_Pos()Test_Mode35()elseif g_cmd = 36 THEN g_cmd = 0Clean_Pos()Test_Mode36()endifwendGLOBAL SUB Clean_Pos()RAPIDSTOP(2) '轴停止WAIT IDLE(0)WAIT IDLE(1)WAIT IDLE(2) DPOS=0,0,0 '将当前位置设置为0 MPOS=0,0,0OP(0,OFF) '输出关闭END SUBGLOBAL SUB Test_Mode1()TABLE(0,100,150,250,300,400,450) BASE(0)'hw_pswitch2有自己的缓冲区, 当前轴目前还剩多大的缓冲区可以通过?hw_pswitch2(n)查询HW_PSWITCH2(2) '停止并删除没有完成的比较点HW_PSWITCH2(1, 0, 1, 0, 5,1) '启动比较输出,模式1,输出口0,第一个比较点输出ON,table地址0-5,正向运动比较 TRIGGER '触发示波器 MOVE(500)END SUBGLOBAL SUB Test_Mode3()TABLE(0,100,150,250,300,400,450) HW_TIMER(0)BASE(0)VECTOR_MOVED(0) = 0 '设置当前的矢量位置HW_PSWITCH2(2) '停止并删除没有完成的比较点'矢量的变化不用考虑单个电机方向的变化, 矢量永远是增大的HW_PSWITCH2(3, 0, 1, 0, 5) '启动比较输出,模式3,输出口0,第一个比较点输出ON,table地址0-5(矢量坐标)TRIGGER '触发示波器抓图MOVEABS(300,200)MOVEABS(400,0) END SUBGLOBAL SUB Test_Mode4() HW_TIMER(0)BASE(0)VECTOR_MOVED(0) = 0 '设置当前的矢量位置HW_PSWITCH2(2) '停止并删除没有完成的比较点HW_PSWITCH2(4, 0, 1, 100) '启动比较输出,模式4,输出口0,第一个比较点输出ON,从矢量位置100开始比较,仅比较1次就结束 TRIGGER '触发示波器抓图MOVEABS(100,120)END SUBGLOBAL SUB Test_Mode5() HW_TIMER(0)BASE(0)VECTOR_MOVED(0) = 0 '设置当前的矢量位置, 只能在电机idle的情况下设置HW_PSWITCH2(2) '停止并删除没有完成的比较点HW_PSWITCH2(5, 0, 1, 50, 8, 30, 5) '启动比较输出,模式5,输出口0,第一个比较点输出ON,从矢量位置50开始比较,比较8次,间隔距离30触发比较,比较触发后运动距离5关闭TRIGGER '触发示波器抓图MOVEABS(100,100)MOVEABS(0, 200)END SUBGLOBAL SUB Test_Mode6()HW_TIMER(0)BASE(0)VECTOR_MOVED(0) = 0 '设置当前的矢量位置, 只能在电机idle的情况下设置HW_PSWITCH2(2) '停止并删除没有完成的比较点 HW_PSWITCH2(6, 0, 1, 50, 15, 30) '启动比较输出,模式6,输出口0,第一个比较点输出ON,从矢量位置50开始比较,比较15次,间隔距离30触发比较HW_TIMER(2, 100000, 60000, 1, OFF, 0) '有效电平时间60000us,每次触发输出1次TRIGGER '触发示波器抓图MOVEABS(100,100) '走一个矩形MOVEABS(0, 200)MOVEABS(-100,100)MOVEABS(0, 0) WAIT IDLE HW_TIMER(0) '停止硬件定时器END SUBGLOBAL SUB Test_Mode7()TABLE(0,100,150,250,300,400,450) BASE(0)VECTOR_MOVED(0) = 0 '设置当前的矢量位置, 只能在电机idle的情况下设置HW_PSWITCH2(2) '停止并删除没有完成的比较点 HW_PSWITCH2(7, 0, 1, 0, 5) '启动比较输出,模式7,输出口0,第一个比较点输出ON,table地址0-5(矢量坐标)HW_TIMER(2, 50000, 30000, 2, OFF, 0) '有效电平时间30000us,每次触发输出2次 TRIGGER '触发示波器抓图MOVEABS(200,200)MOVEABS(300,0)WAIT IDLE HW_TIMER(0) '停止硬件定时器END SUBGLOBAL SUB Test_Mode25()TABLE(0, 0,0, 50,50, 100,100, 50,150, 0,200, -50,150, -100,100, -50,50) HW_PSWITCH2(2) '停止并删除没有完成的比较点 HW_PSWITCH2(25, 0, 0, 10, 8, 0) '启动比较输出,模式25,输出口0,第一个比较点输出ON,脉冲偏差10,table地址0-15,8个坐标TRIGGER '触发示波器抓图MOVEABS(100,100) '走一个矩形MOVEABS(0, 200)MOVEABS(-100,100)MOVEABS(0, 0)END SUBGLOBAL SUB Test_Mode26()TABLE(0, 0,0, 50,50, 100,100, 50,150, 0,200, -50,150, -100,100, -50,50)HW_TIMER(0)HW_PSWITCH2(2) '停止并删除没有完成的比较点 HW_PSWITCH2(26, 0, 1, 10, 8, 0) '启动比较输出,模式26,输出口0,第一个比较点输出ON,脉冲偏差10,table地址0-15,8个坐标HW_TIMER(2, 100000, 50000, 2, OFF, 0) '有效电平时间50000us,每次触发输出2次 TRIGGER '触发示波器抓图MOVEABS(100,100) '走一个矩形MOVEABS(0, 200)MOVEABS(-100,100)MOVEABS(0, 0) WAIT IDLE HW_TIMER(0) '停止硬件定时器END SUBGLOBAL SUB Test_Mode35()TABLE(0, 20,20,20, 40,40,40, 70,70,70, 100,100,100, 140,140,140, 180,180,180) BASE(0,1,2)HW_PSWITCH2(2) '停止并删除没有完成的比较点 HW_PSWITCH2(35, 0, 1, 10, 6, 0) '启动比较输出,模式35,输出口0,第一个比较点输出ON,脉冲偏差10,table地址0-18,6个坐标 TRIGGER '触发示波器抓图MOVEABS(200,200,200) '走直线END SUBGLOBAL SUB Test_Mode36()TABLE(0, 20,20,20, 40,40,40, 70,70,70, 100,100,100, 140,140,140, 180,180,180)BASE(0,1,2)HW_PSWITCH2(2) '停止并删除没有完成的比较点 HW_TIMER(2, 100000, 50000, 1, OFF, 0) '有效电平时间50000us,每次触发输出1次HW_PSWITCH2(36, 0, 1, 10, 6, 0) '启动比较输出,模式36,输出口0,第一个比较点输出ON,脉冲偏差10,table地址0-18,6个坐标 TRIGGER '触发示波器抓图MOVEABS(200,200,200) '走直线 WAIT IDLE HW_TIMER(0) '停止硬件定时器END SUB
四.不同模式波形
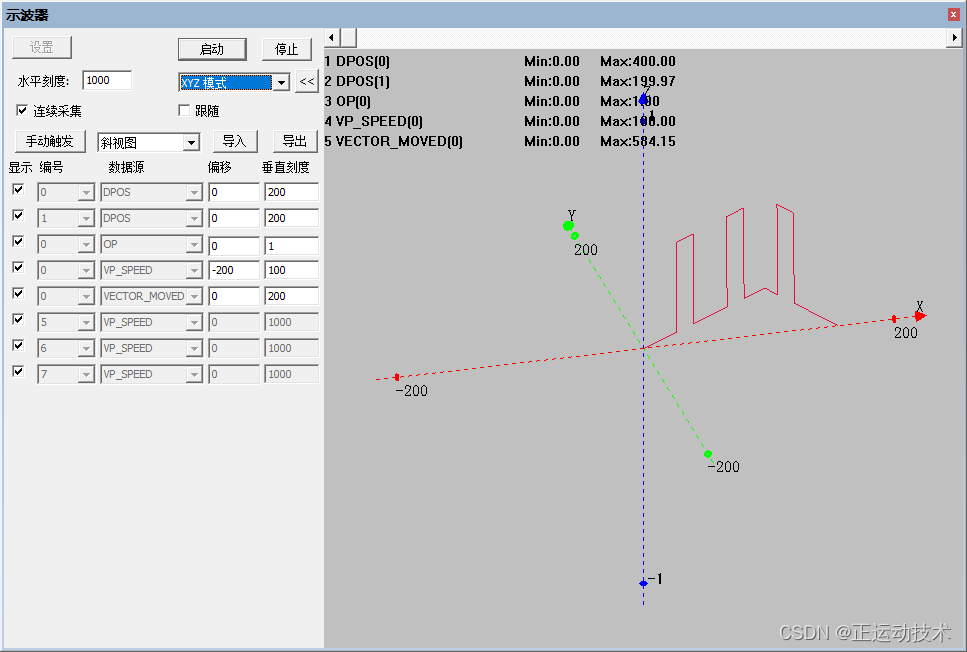
1.Mode=1
(1)比较点坐标: 6个
TABLE(0, 100,150,250,300,400,450)
(2)启动比较输出: 模式1,输出口0,第一个比较点输出ON,table地址0-5,正向运动比较。
HW_PSWITCH2(1, 0, 1, 0, 5, 1)
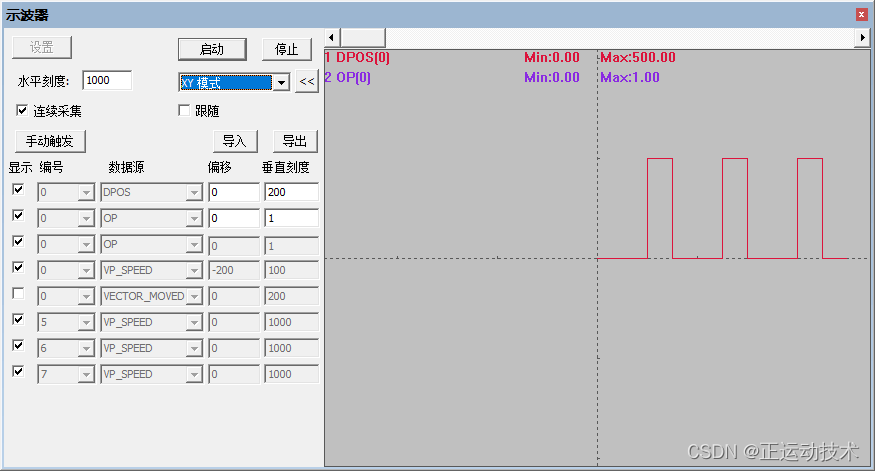
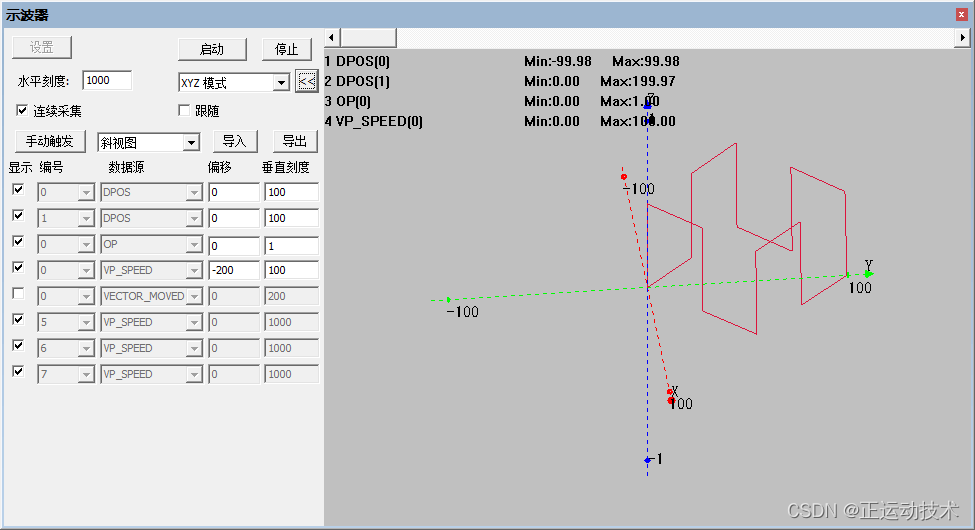
(3)示波器采样波形: 轴0每到达一个比较的位置,OP(0)触发反转一次,直到所有的TABLE的比较完成,OP保持最后一次反转的状态。

XY模式下能明显看出输出随轴0运动位置的变化。
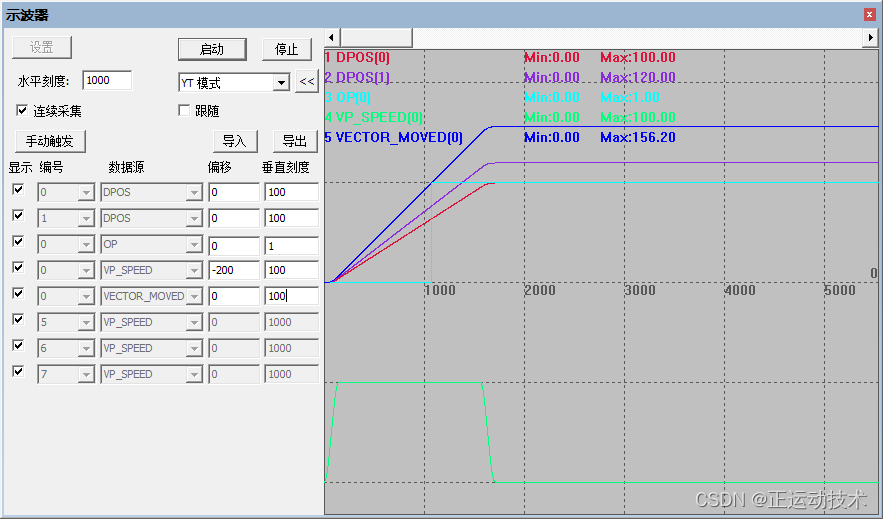
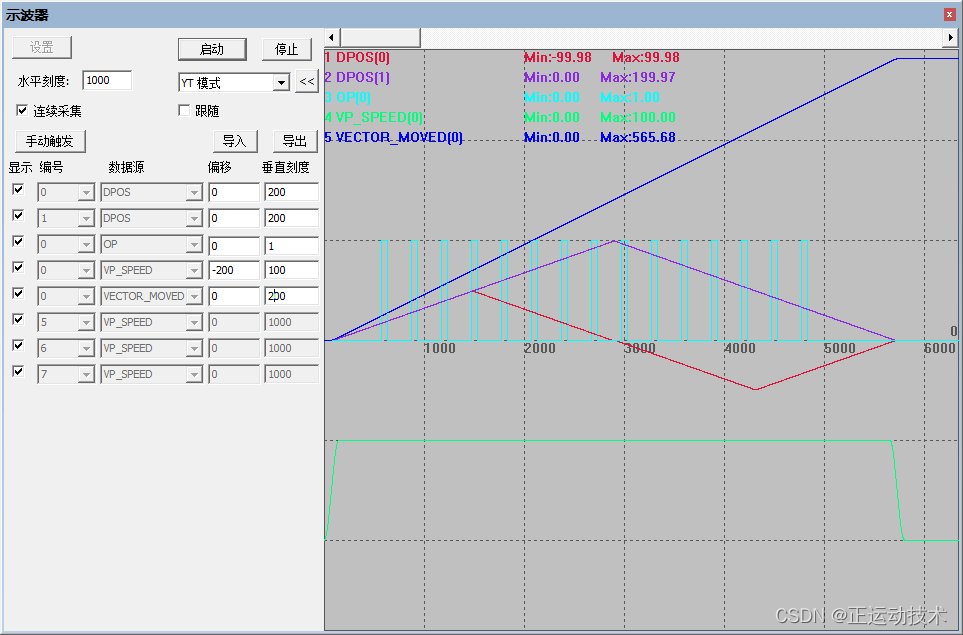
2.Mode=3
(1)比较点坐标: 6个矢量位置
TABLE(0, 100,150,250,300,400,450)
(2)启动比较输出: 模式3,输出口0,第一个比较点输出ON,table地址0-5(矢量坐标)。
HW_PSWITCH2(3, 0, 1, 0, 5)
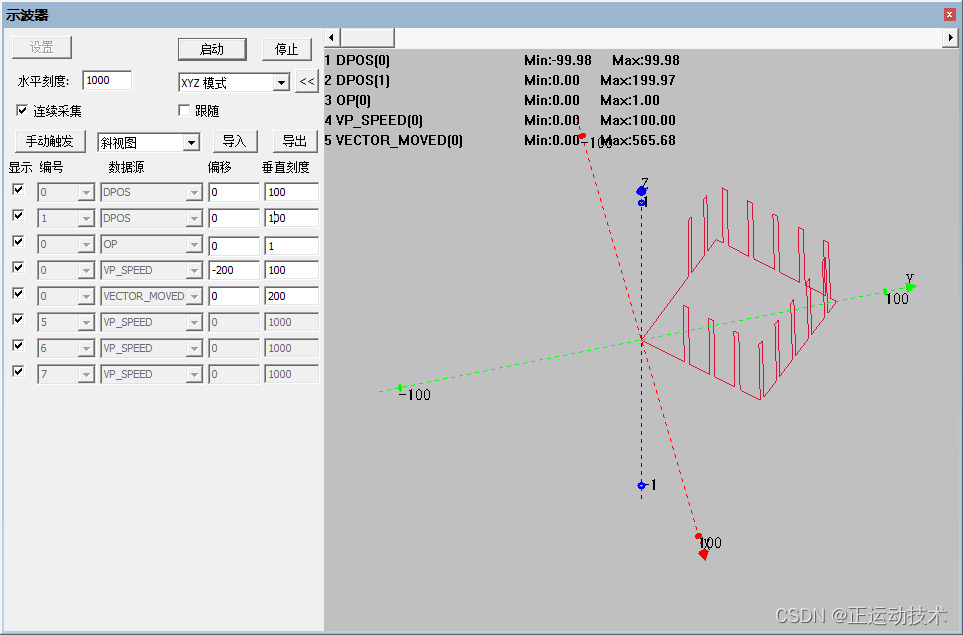
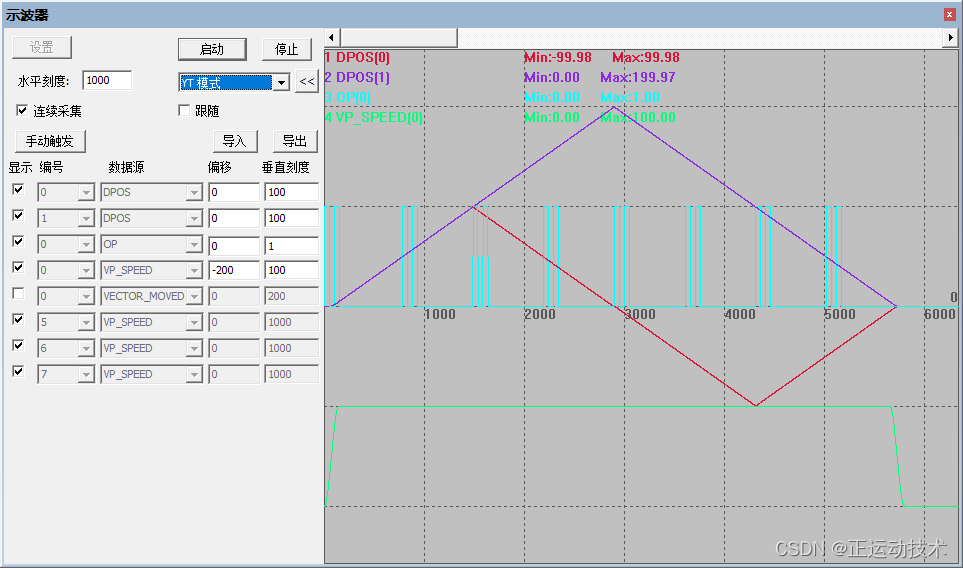
(3)示波器采样波形: 轴0轴1插补的矢量合成位置VECTOR_MOVED(0)每到达一个比较的位置,OP(0)触发反转一次,,直到所有的TABLE的比较完成,OP保持最后一次反转的状态。
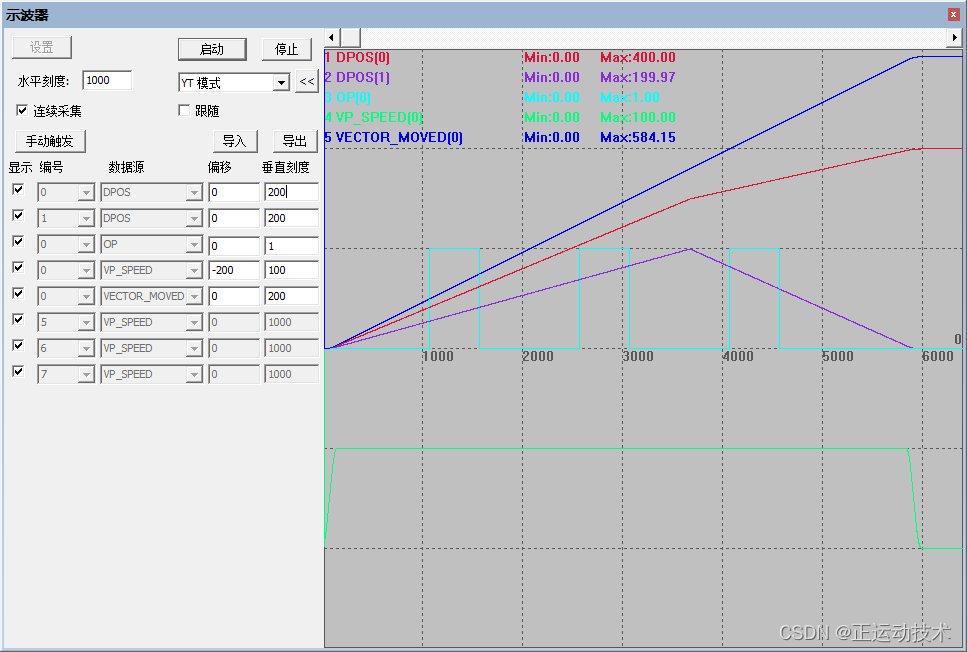
XYZ模式下能明显看出输出随插补运动位置的变化。
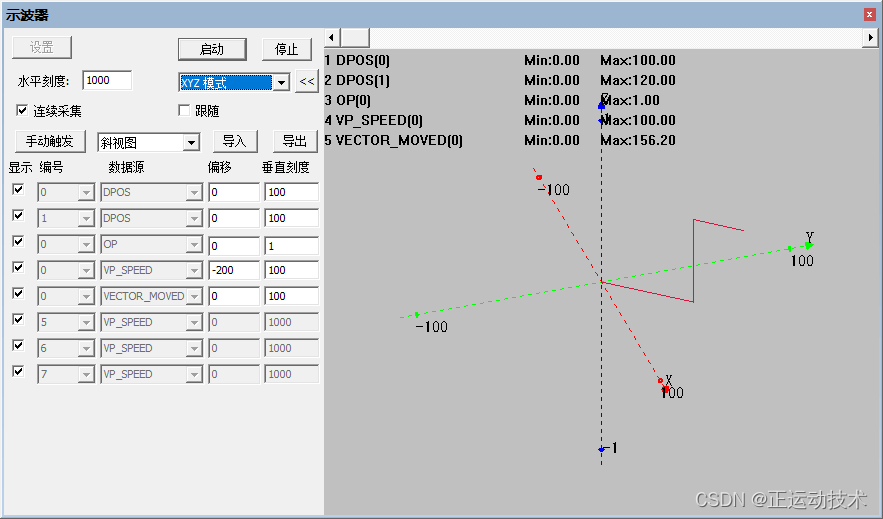
3.Mode=4
不使用TABLE。
(1)启动比较输出: 模式4,输出口0,第一个比较点输出ON,比较点矢量坐标100。
HW_PSWITCH2(4, 0, 1, 100)
(2)示波器采样波形: 轴0轴1插补的矢量合成位置VECTOR_MOVED(0)到达100矢量比较位置,OP(0)触发反转一次,比较完成。
XYZ模式下能明显看出输出随插补运动位置的变化。
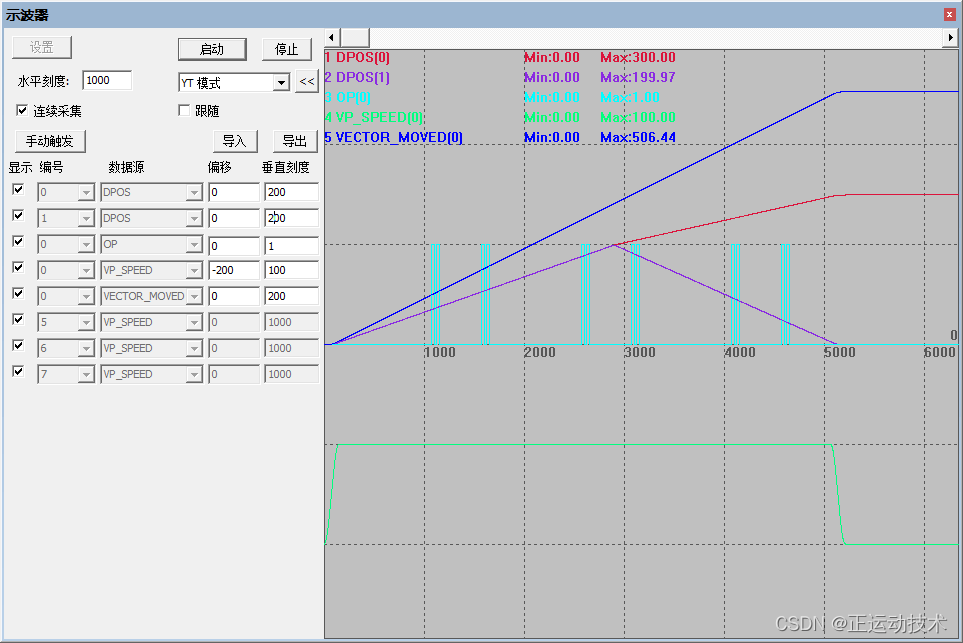
4.Mode=5
不使用TABLE。
(1)启动比较输出: 模式5,输出口0,第一个比较点输出ON,从矢量位置50开始比较,比较8次,间隔距离30触发比较,比较触发后运动距离5关闭。
HW_PSWITCH2(5, 0, 1, 50, 8, 30, 5)
(2)示波器采样波形: 轴0轴1插补的矢量合成位置VECTOR_MOVED(0)到达一个矢量比较位置50,OP(0)触发反转一次,后续每间隔30比较一次打开OP,再运动5个距离关闭OP,重复比较8次后结束比较。
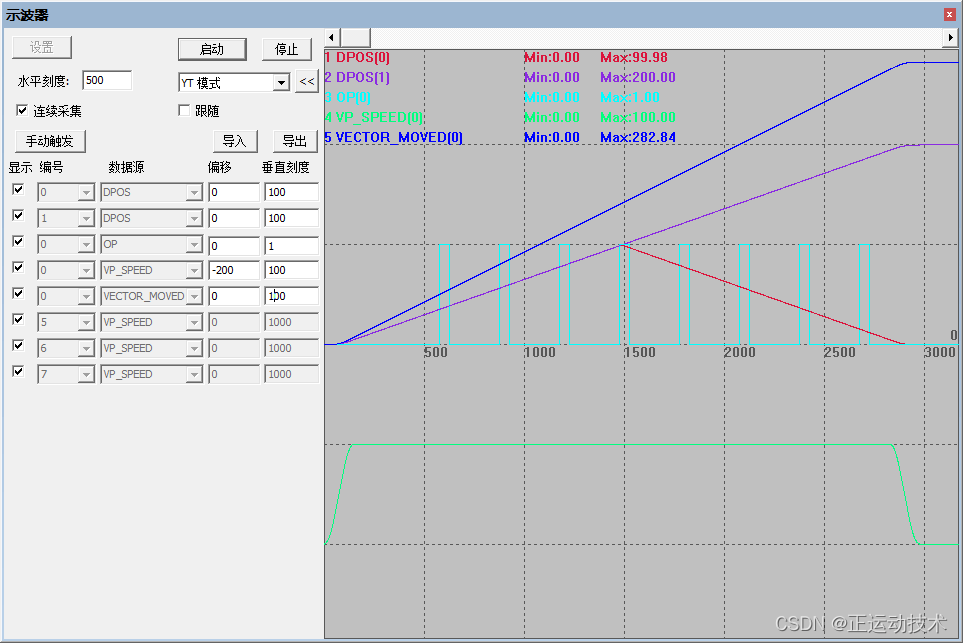
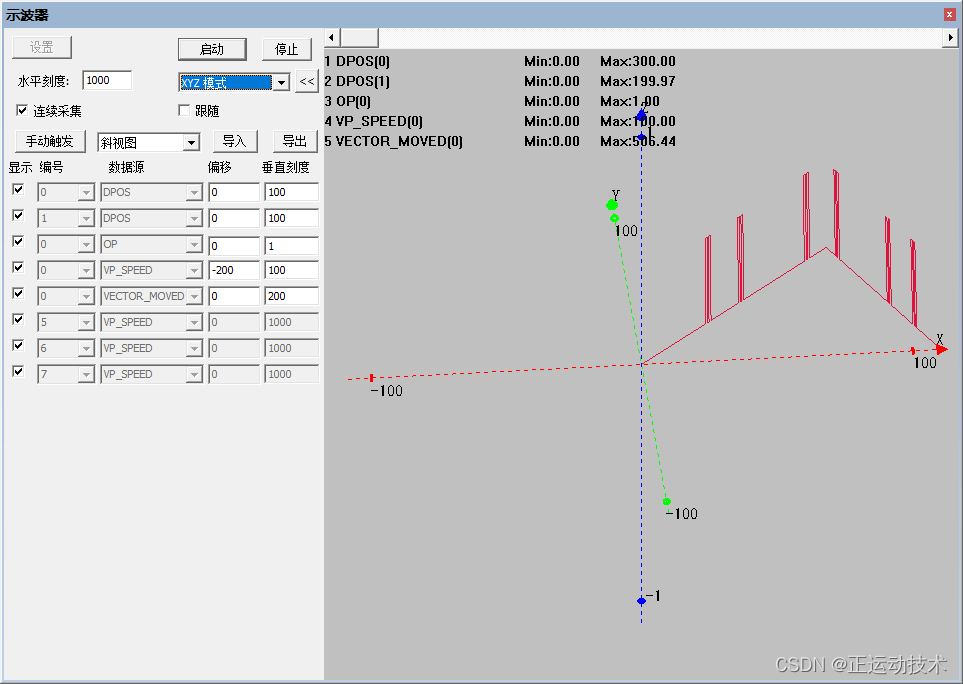
XYZ模式下能明显看出输出随插补运动位置的变化。

5.Mode=6
不使用TABLE。
(1)启动比较输出: 模式6,输出口0,第一个比较点输出ON,从矢量位置50开始比较,比较15次,间隔距离30触发比较
HW_PSWITCH2(6, 0, 1, 50, 15, 30)
(2)输出脉冲宽度: 硬件定时周期100000us,输出脉冲的宽度为60000us,每次比较输出1次脉冲。
HW_TIMER(2, 100000, 60000, 1, OFF, 0)
(3)示波器采样波形: 轴0轴1插补的矢量合成位置VECTOR_MOVED(0)到达一个矢量比较位置50,OP(0)触发反转一次,后续每间隔30比较一次打开OP,60000us后关闭OP,重复比较15次后结束比较。
XYZ模式下能明显看出输出随插补运动位置的变化。
6.Mode=7
(1)比较点坐标: 6个矢量位置
TABLE(0 , 100,150,250,300,400,450)
(2)启动比较输出: 模式7,输出口0,第一个比较点输出ON,TABLE地址0-5(矢量坐标)
HW_PSWITCH2(7, 0, 1, 0, 5)
(3)输出脉冲宽度: 硬件定时周期50000us,输出脉冲的宽度为30000us,每次比较输出2次脉冲。
HW_TIMER(2, 50000, 30000, 2, OFF, 0)
(4)示波器采样波形: 轴0轴1插补的矢量合成位置VECTOR_MOVED(0)每到达一个TABLE位置OP(0)触发一次,每次触发输出 2次周期50000us,有效输出30000us的脉冲波后关闭OP,直到所有的TABLE点都比较完成。
XYZ模式下能明显看出输出随插补运动位置的变化。
7.Mode=25
(1)比较点坐标: 8个,占用16个TABLE
TABLE(0, 0,0,50,50,100,100,50,150,0,200,-50,150,-100,100,-50,50)
(2)启动比较输出: 模式25,输出口0,第一个比较点输出ON,脉冲偏差10,table地址0-15,8个坐标。
HW_PSWITCH2(25, 0, 1, 10, 8, 0)
(3)示波器采样波形: 轴0轴1每到达一个比较的XY位置,OP(0)触发反转一次,直到所有的TABLE点比较完成,OP保持最后一次反转的状态。

XYZ模式下能明显看出输出随插补运动位置的变化。
8.Mode=26
(1)比较点坐标: 8个,占用16个TABLE
TABLE(0, 0, 0, 50, 50, 100,100, 50 , 150 , 0 , 200 , -50 , 150 , -100 , 100 , -50 , 50)
(2)启动比较输出: 模式26,输出口0,第一个比较点输出ON,脉冲偏差10,table地址0-15,8个坐标。
HW_PSWITCH2(26, 0, 1, 10, 8, 0)
(3)输出脉冲宽度: 硬件定时周期100000us,输出脉冲的宽度为50000us,每次比较输出2次脉冲。
HW_TIMER(2, 100000, 50000, 2, OFF, 0)
(4)示波器采样波形: 轴0轴1每到达一个TABLE的比较XY位置,OP(0)触发,每次触发输出2次周期100000us,输出脉冲的宽度为50000us的脉冲波,直到所有的TABLE点比较完成,OP保持最后一次反转的状态。
XYZ模式下能明显看出输出随插补运动位置的变化。
9.Mode=35
(1)比较点坐标: 6个,占用18个TABLE
TABLE(0,20 ,20 ,20,40 ,40 ,40,70 ,70 ,70,100 ,100 ,100,140,140,140, 180,180,180)
(2)启动比较输出: 模式35,输出口0,第一个比较点输出ON,脉冲偏差10,table地址0-18,6个坐标
HW_PSWITCH2(35, 0, 1, 10, 6, 0)
(3)输出脉冲宽度: 硬件定时周期100000us,输出脉冲的宽度为50000us,每次比较输出1次脉冲。
HW_TIMER(2, 100000, 50000, 1, OFF, 0)
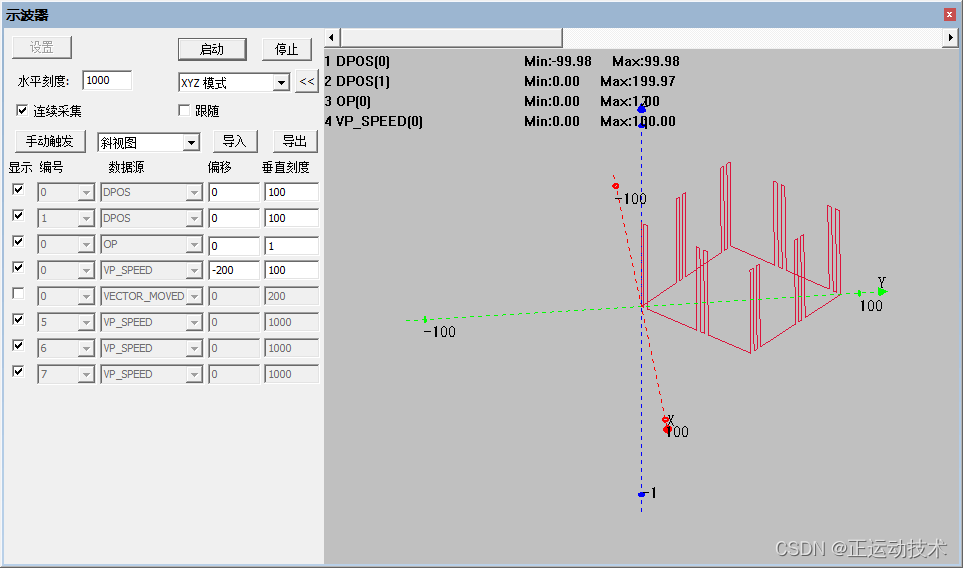
(4)示波器采样波形: 轴0轴1轴2每到达一个TABLE的比较XYZ位置,OP(0)触发反转一次,直到所有的TABLE点比较完成,OP保持最后一次反转的状态。
10.Mode=36
(1)比较点坐标: 6个,占用18个TABLE
TABLE(0 , 20 , 20 , 20, 40 , 40 , 40 , 70 , 70 , 70, 100 , 100 , 100, 140 , 140 , 1 40, 180 , 180 , 180)
(2)启动比较输出: 模式36,输出口0,第一个比较点输出ON,脉冲偏差10,table地址0-18,6个坐标。
HW_PSWITCH2(36, 0, 1, 10, 6, 0)
(3)输出脉冲宽度: 硬件定时周期100000us,输出脉冲的宽度为50000us,每次比较输出1次脉冲。
HW_TIMER(2, 100000, 50000, 1, OFF, 0)
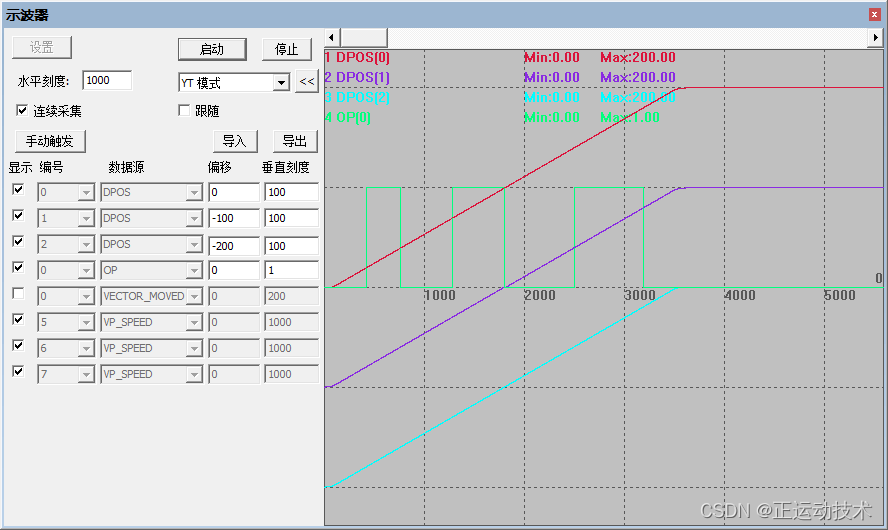
(4)示波器采样波形: 轴0轴1轴2每到达一个TABLE的比较XYZ位置,OP(0)触发,每次触发输出1次周期100000us,输出脉冲的宽度为50000us的脉冲波,直到所有的TABLE点比较完成,OP保持最后一次反转的状态。

11.视频演示
运动控制器PSO位置同步输出(二)PSO模式详解
本次,正运动技术运动控制器PSO位置同步输出(二):PSO模式详解,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师:400-089-8936。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。