本系列文章由Aimar_Johnny编写,欢迎转载,转载请标明出处,谢谢。
http://blog.csdn.net/lzhq1982/article/details/73747162
前两篇介绍了Unity Shader的主要数学部分,书上还有些相关的数学介绍,将在这篇做最后的总结。
1、法线变换
法线(normal),也被称为法矢量。游戏中,模型的顶点携带的信息中,法线就是其中一种。我们变换一个模型,不仅需要变换它的顶点,还需要变换顶点法线,以便在后续处理中计算光照等。
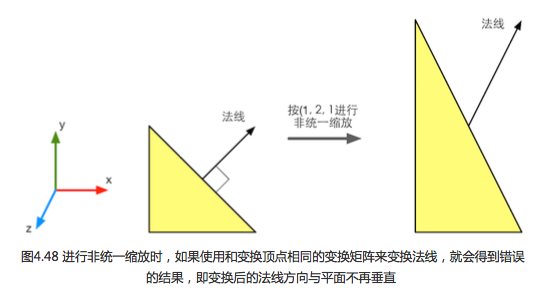
从上一篇我们知道,点和大部分方向矢量都可以用同一个变换矩阵在两个空间之间变换。但法线用同一个变换矩阵,可能无法确保维持法线的垂直性。下面介绍一下原因。
先来了解一下另一种方向矢量:切线(tangent),也叫切矢量。也是顶点携带的一种信息。它与法线方向垂直。切线是两个点之间的差值计算得来的,因此可以直接用变换顶点的变换矩阵来变换切线。假设,这个变换顶点也就是变换切线的矩阵是3x3的变换矩阵 
T表示切线,上面表示切线从空间A到空间B的转换。但如果直接用同一矩阵变换法线,得到的新法线可能就不会与表面垂直了,例如:
那么怎么求法线变换的矩阵呢。答案是用法线和切线垂直的约束公式:


然后推导可得:

有很多人对第一个等式有疑问,请大家注意第一个等式左边是向量点乘,有个点,等式右边把向量变成了列矩阵,变成了矩阵相乘,中间没点了。其他应该没问题。看最后的等式部分,因为


如果
其他情况,我们就要求
2、Unity Shader 内置变量(数学)
Unity给我们提供了很多有关变换的内置参数,这些内置变量可以在UnityShaderVariables.cginc文件中找到定义和说明。
1)变换矩阵
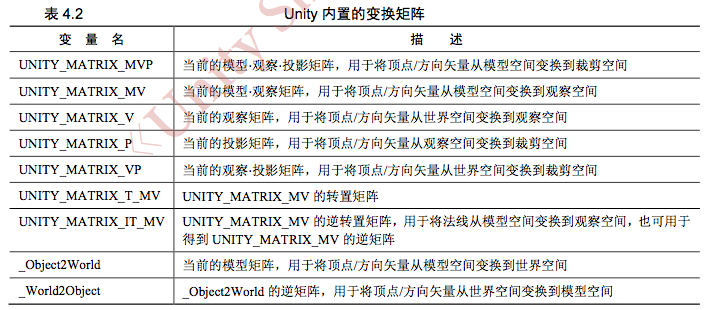
注意最后两个,Unity5.5版本中_Object2World已经变成unity_ObjectToWorld,_World2Object也变成了unity_WorldToObject,但由于Unity的向下兼容性,Unity会自动改写它们,不会出错。还有在顶点着色器中,我们往往第一行就会用到UNITY_MATRIX_MVP:mul(UNITY_MATRIX_MVP, v.vertex); 这是把顶点从模型空间转换到裁剪空间,不用我们手动变换空间了,不过这在unity5.6中已经改为:UnityObjectToClipPos(v.vertex); 在UnityShaderUtilities.cginc里,注意5.6以上版本才有这个文件。官方实现如下:
// Tranforms position from object to homogenous space
inline float4 UnityObjectToClipPos(in float3 pos)
{// More efficient than computing M*VP matrix productreturn mul(UNITY_MATRIX_VP, mul(unity_ObjectToWorld, float4(pos, 1.0)));
}2)摄像机和屏幕参数
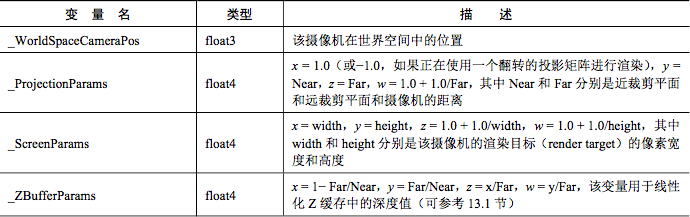
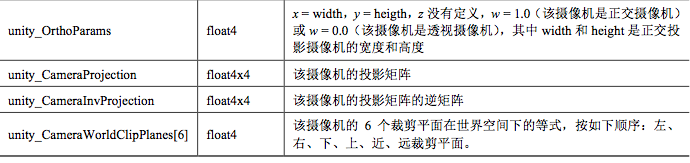
读者也没有必要记住他们,以后用到了方便查阅就行。用多了就记住了。
3、Cg中矢量和矩阵类型
我在Unity Shader基础里说过Cg,是我们目前主要的着色器编程语言。这里主要说一下Cg中矢量和矩阵的表达方式。Cg中,矩阵是由float3x3、float4x4等关键字定义的,矢量是由float3、float4等关键字定义的,当然,也可以当成是1xn行矩阵或nx1的列矩阵,这取决于运算种类和运算中的位置。如下:
float4 a = float4(1.0, 2.0, 3.0, 4.0);
float4 b = float4(1.0, 2.0, 3.0, 4.0);
点积:float result = dot(a, b);
但在矩阵乘法时,参数位置决定是按行矩阵还是列矩阵进行乘法。Cg中矩阵乘法的函数是mul。
float4 v = float4(1.0, 2.0, 3.0, 4.0);
float4x4 M = float4x4(1.0, 0.0, 0.0, 0.0,0.0, 2.0, 0.0, 0.0,0.0, 0.0, 3.0, 0.0,0.0, 0.0, 0.0, 4.0);
//v当成列矩阵和矩阵M右乘
float4 column_mul = mul(M, v);//v当成行矩阵左乘
float4 row_mul = mul(v, M);//注意:column_mul 不等于 row_mul,而是:
//mul(M, v) = mul(v, tranpose(M));
//mul(v, M) = mul(tranpose(M), v);4、Unity屏幕坐标:ComputeScreenPos/VPOS/WPOS
这块内容是有点超前的,只不过涉及数学计算部分,所以放在这里,请大家记住有这么回事,后面屏幕抓取那里我们会用到ComputeGrabScreenPos,到时候还需要你回来看。好了,进入主题。
在写shader时,我们有时希望获得片元在屏幕上的像素位置。在顶点/片元着色器中,有两种方式获得片元的屏幕坐标。
1)在片元着色器的输入中声明VPOS或WPOS语义(语义以后再讲)。
VPOS是HLSL中对屏幕坐标的语义,WPOS是Cg中对屏幕坐标的语义。两者在Unity Shader中是等价的。我们可以在HLSL/Cg中通过语义的方式定义顶点/片元着色器的默认输入,不用自己定义输入输出的数据结构。如是我们可以在片元着色器中这样写:
fixed4 frag(float4 sp : VPOS) : SV_Target {//用屏幕坐标除以屏幕分辨率_ScreenParams.xy,得到视口空间中的坐标return fixed4(sp.xy/_ScreenParams.xy, 0.0, 1.0);
}
我们用了VPOS/WPOS的xy,那zw呢,在Unity中,它们的z分量范围是[0, 1],摄像机近裁剪面z为0,远裁剪面z为1。w分量取决于投影类型,透视投影w范围是[1/Near, 1/Far],Near和Far对应了Camera组件中设置的近裁剪平面和远裁剪平面距离摄像机的远近。正交投影w值恒为1。
2)通过Unity提供的ComputeScreenPos函数
这个函数在UnityCG.cginc里被定义。直接上代码:
struct vertOut {float4 pos : SV_POSITION;float4 srcPos : TEXCOORD0;
}vertOut vert (appdata_base v) {vertOut o;o.pos = mul (UNITY_MATRIX_MVP, v.vertex);//第一步:把ComputeScreenPos的结果保存在srcPos中o.srcPos = ComputeScreenPos(o.pos);return o;
}fixed4 frag (vertOut i) : SV_Target {//第二步:用srcPos.xy除以srcPos.w得到视口空间中的坐标float2 wcoord = i.srcPos.xy / i.srcPos.w;return fixed4(wcoord, 0.0, 1.0);
}上一篇我们看到了如何将裁剪空间中的点映射到屏幕空间中。这里回忆一下,经过齐次除法后,我们把裁剪空间变换到了NDC中,不记得NDC的回头看看,NDC的xy坐标是[-1, 1],而屏幕空间是[0, 1],所以只要经过(x + 1) / 2的操作就可以映射过去了,所以我们得到如下公式:
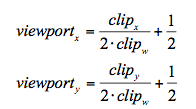
这里的clip的xy都是裁剪空间的,所以除以w变成NDC下,我们再看一下ComputeScreenPos的实现(unity5.6版本):
inline float4 ComputeNonStereoScreenPos(float4 pos) {float4 o = pos * 0.5f;o.xy = float2(o.x, o.y*_ProjectionParams.x) + o.w;o.zw = pos.zw;return o;
}inline float4 ComputeScreenPos(float4 pos) {float4 o = ComputeNonStereoScreenPos(pos);
#if defined(UNITY_SINGLE_PASS_STEREO)o.xy = TransformStereoScreenSpaceTex(o.xy, pos.w);
#endifreturn o;
}o.x = pos.x / 2 + pos.w / 2;
o.y = pos.y / 2 + pos.w / 2;
o.z = pos.z;
o.w = pos.w;
读者可以看出,o.x和o.y并不是视口空间的坐标,除以pos.w就和上面等式相同了,所以我们看片元着色器中的第二步就是这个操作。但为什么不在顶点着色器里的ComputeScreenPos里直接除却要在片元着色器中除呢,这是因为如果在顶点着色器中除的话,会破坏插值结果。从顶点着色器到片元着色器会有个插值的过程,这点在渲染流水线中说过了。如果我们对x/w,y/w进行插值,结果会不准确。因为投影空间不是线性空间,插值往往是线性的,所以不要在投影空间进行插值。最后我们看输出的zw没变化,还是裁剪空间的zw,所以如果使用透视投影,z范围是[-Near, Far],w范围是[Near, Far](读者忘了可以看上一篇的裁剪空间图)。如果是正交投影,z是[-1, 1],w是1。
最后比书上多说一点是ComputeGrabScreenPos,后面抓取屏幕中会遇到,再过来看看。我们直接看看代码:
inline float4 ComputeGrabScreenPos (float4 pos) {#if UNITY_UV_STARTS_AT_TOPfloat scale = -1.0;#elsefloat scale = 1.0;#endiffloat4 o = pos * 0.5f;o.xy = float2(o.x, o.y*scale) + o.w;
#ifdef UNITY_SINGLE_PASS_STEREOo.xy = TransformStereoScreenSpaceTex(o.xy, pos.w);
#endifo.zw = pos.zw;return o;
}数学部分的介绍到此结束,但Shader离不开数学运算,书里推荐了扩展阅读,有兴趣的就多多研究吧。
(最后感叹一下女神这个章节的书写,我用三篇分开整理,内容还这么庞大,编辑公式好麻烦啊!!!)