用栈实现队列
1、栈的特点
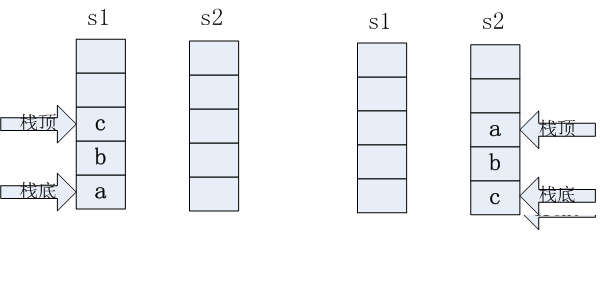
栈的特点是先进后出,进出元素都是在同一端(栈顶)。
入栈:

出栈:

2、队列的特点
队列的特点是先进先出,出入元素是在不同的两端(队头和队尾)。
入队:

出队:

3、两个栈实现队列
我们拥有两个栈,可以让其中一个栈作为队列的入口,负责插入新元素;另一个栈作为队列的出口,负责移除老的元素。

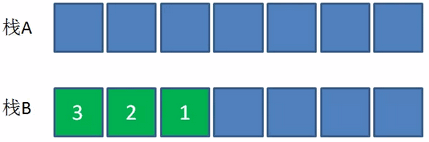
队列的主要操作无非有两个:入队和出队。在模拟入队操作时,每一个新元素都被压入到栈A当中。
让元素1“入队”:

让元素2“入队”:

让元素3“入队”:

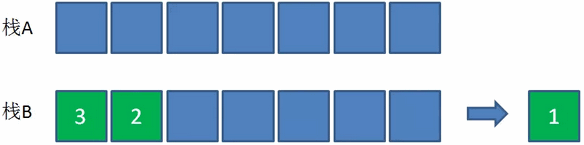
这时候,我们希望最先“入队”的元素1“出队”,需要怎么做呢?
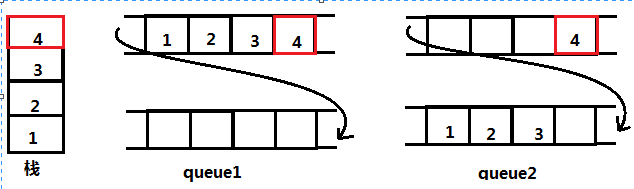
让栈A中的所有元素按顺序出栈,再按照出栈顺序压入栈B。这样一来,元素从栈A弹出并压入栈B的顺序是3,2,1,和当初进入栈A的顺序1,2,3是相反的:
此时让元素1“出队”,也就是让元素1从栈B弹出:
让元素2“出队”:
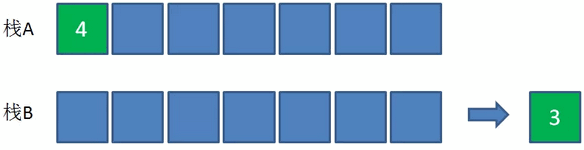
如果这个时候又想做入队操作了呢?当有新元素入队时,重新把新元素压入栈A。
让元素4“入队”:

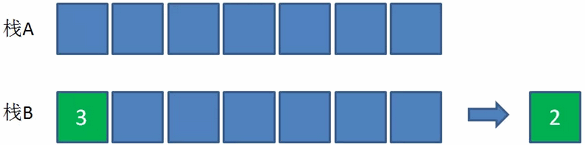
此时的出队操作仍然从栈B弹出元素。
让元素3“出队”:
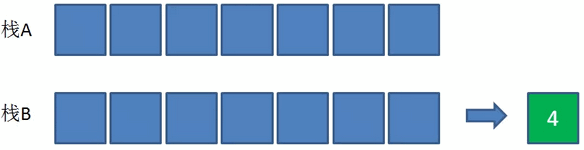
这个时候栈B已经空了,如果再想出队怎么办呢?只要栈A还有元素就像刚才一样,把栈A元素弹出并压入栈B。
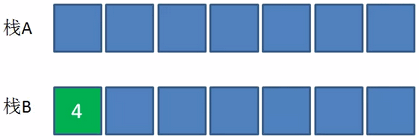
让元素4“出队”:
4、实现思路
(1) 使用两个栈A,B,其中假定A负责push操作,B负责pop操作。使用一个变量back_elem来存储最后添加的元素。
(2) 实现队列的push操作, 每次进行添加操作,都会相应得对栈A进行添加元素。并对back_elem赋值
(3) 实现队列的pop操作,每次进行删除操作,因为栈B负责pop操作,
首先判断栈B是否为空?
a.如果B为空,则判断A是否为空?
如果A也为空,则输出错误信息,此时队列为空。
如果A不为空,则将栈A中的所有数据存储到B中。执B.push(A.top()), A.pop(). 然后在对栈B执行,B.pop()操作,将队列的头元素删除
b.如果B不为空, 则直接对B执行 B.pop()操作。
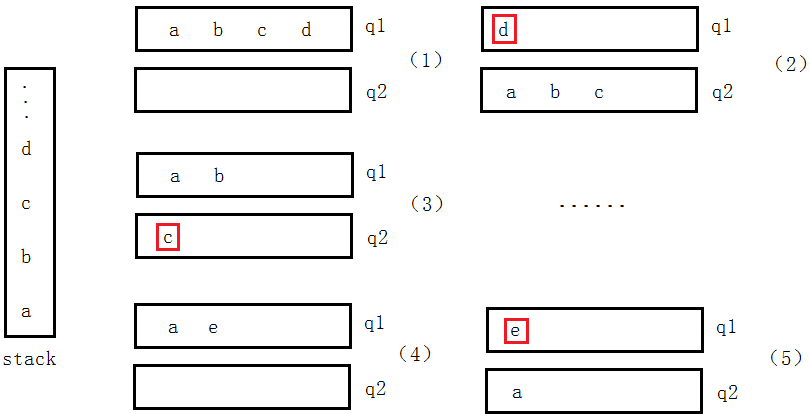
例如对a,b,c实现push操作,然后实现pop操作
(4)实现队列的front()操作,方法如pop操作相同,只是在最后一步使用B.top()返回值。
(5)实现队列的back()操作,因为我们变量back_elem保存着最后一个输入的数据,故直接将其返回。
(6)实现队列的size()操作,和empty()操作,就是对A,B分别执行操作。
5、代码实现
#include <iostream>
#include <stack>
#include <string>
using namespace std;template<typename T>
class Queue {
private:stack<T>stackA; //栈Astack<T>stackB; //栈BT back_elem; //用于存储新添加的元素
public:void push(T elem); //将新元素压入队列(压入栈A)中void pop(); //将元素弹出队列(从栈B中弹出)T front(); //队首元素T back(); //队尾元素int size()const; //队列长度bool empty()const; //队列是否为空
};/*
入队操作
实现队列的push操作, 每次进行添加操作,都会相应得对栈A进行添加元素。并对back_elem赋值
*/
template<typename T>
void Queue<T>::push(T elem)
{stackA.push(elem);//将元素压入队列back_elem = elem; //存储新添加的元素
}/*
出队操作
实现队列的pop操作,每次进行删除操作,因为栈B负责pop操作。
首先判断栈B是否为空?
a.如果栈B为空,则判断A是否为空?如果A也为空,则输出错误信息,此时队列为空。如果A不为空,则将栈A中的所有数据存储到B中。执B.push(A.top()), A.pop().然后在对栈B执行,B.pop()操作,将队列的头元素删除
b.如果栈B不为空, 则直接对栈B执行 B.pop()操作。*/
template<typename T>
void Queue<T>::pop()
{//判断栈B是否为空?if (!stackB.empty()) //栈B不为空, 则直接对栈B执行 B.pop()操作。{stackB.pop();}else if (!stackA.empty()) //栈B为空,则判断栈A是否为空?栈A不为空,则将栈A中的所有数据//存储到B中。执B.push(A.top()), A.pop().然后在对栈B执行,B.pop()操作,将队列的头元素删除{stackB.push(stackA.top());stackA.pop();}else{std::cout << "error pop(),empty queue!" << std::endl;}
}/*
队首元素
*/
template<typename T>
T Queue<T>::front()
{if (!stackB.empty()){return stackB.top();}else if (!stackA.empty()){while (!stackA.empty()){stackB.push(stackA.top());stackA.pop();}return stackB.top();}else{std::cout << "error front(),empty queue!" << std::endl;}
}/*
队尾元素
*/
template<typename T>
T Queue<T>::back()
{if (!empty()){return back_elem;}else{std::cout << "error back(),empty queue!" << std::endl;}
}/*
队列长度
*/
template<typename T>
int Queue<T>::size() const
{return stackA.size() + stackB.size();
}/*
队列是否为空
*/
template<typename T>
bool Queue<T>::empty() const {return stackA.empty() && stackB.empty();
}int main()
{Queue<int>queue;//入队操作queue.push(1);queue.push(2);queue.push(3);queue.push(4);cout << "Four times push() After:" << endl;//队首元素cout << "The queue front:" << queue.front() << endl;//队尾元素cout << "The queue back:" << queue.back() << endl;//队列sizecout << "The queue size:" << queue.size() << endl;//出队操作queue.pop();queue.pop();queue.pop();queue.pop();cout << "----------------------------" << endl;cout << "Four times pop() After:" << endl;//队首元素cout << "The queue front:" << queue.front() << endl;//队尾元素cout << "The queue back:" << queue.back() << endl;//队列sizecout << "The queue size:" << queue.size() << endl;//system("pause");return 0;
}结果:
Four times push() After:
The queue front:1
The queue back:4
The queue size:4
----------------------------
Four times pop() After:
error front(),empty queue!
The queue front:260750304
error back(),empty queue!
The queue back:260750304
The queue size:0
请按任意键继续. . .
6、时间复杂度
入队操作的时间复杂度显然是O(1)。至于出队操作,如果涉及到栈A和栈B的元素迁移,时间复杂度是O(n),如果不用元素迁移,时间复杂度是O(1)。







![[Prescan]Prescan中Sensor学习](https://img-blog.csdnimg.cn/2019100909585445.png)