程序猿:妹子电脑装系统不用愁!Windows还是Ubuntu都搞定!
重装系统是不是很麻烦?是不是很烦重装系统,什么windows,什么Ubuntu(linux),看上去就麻烦,那么小编今天就给你科普一下这些重装电脑的难度!

windows重装
如果你本身是windows,还想重装成windows,这个现在不用太担心了,真的不难!
很多的在线安装轻松帮你完成,但是前提是你要有一个好的网络环境!
多余的话也不多说了,直接介绍吧!
步骤:下载重装系统软件 --> 检测系统 —> 备份文件 --> 选择重装系统 -->装机 -->完成
深度装机大师轻松帮你搞定,看了图就知道了!当然这种软件现在市面上很多了,还有映象总裁等,直接上网搜就可以搜到,不过按照小编亲身尝试,还是推荐你深度装机大师!这个界面让你安心点!(直接系统之家就可以看到,或者自行搜baidu)

这个很适合女生和一些想装机电脑小白,不用整什么U盘启动了,直接点岂不是更好?
程序猿:妹子电脑装系统不用愁!Windows还是Ubuntu都搞定!
Ubuntu (Linux安装)
对于Ubantu安装,这不得不来个链接呐,但是还是本着不是推广是推送福利的原则,我就是说下你得制做个U盘启动,但。。。
不用担心,我推荐一个非常好用的制作U盘启动的软件,当然ISO镜像,还是要自己下的,这个木得办法!
工具:8G U盘(一般4G也可以,8G绝对够用)一个, rufus U盘启动盘制作软件, Ubuntu ISO镜像
步骤: 下载rufus -->下载Ubuntu ISO镜像 -->制作U盘启动盘 -->重启电脑–>进入BIOS界面 -->选择install Ubuntu --> 设置参数 -->完成
程序猿:妹子电脑装系统不用愁!Windows还是Ubuntu都搞定!
U盘启动制作工具
制作U盘启动盘
这个步骤,下的东西多一点,但是也不算太多,就是下载一个rufus U盘制作软件,这个比如什么U…ISO等要好用,不用那么麻烦,界面简单:点击rufus.exe后,会出现以下界面
程序猿:妹子电脑装系统不用愁!Windows还是Ubuntu都搞定!
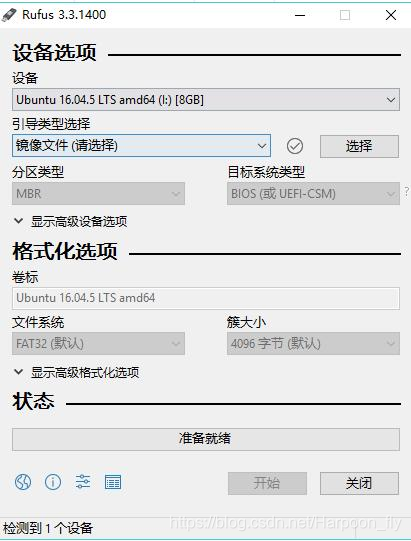
使用它之前下载好镜像,插好U盘
插上U盘,会自动识别,上面镜像文件点击 选择 选择自己下载好的镜像iso文件就好,然后分区类别基本上可以不动的,MBR和GPT看自己的电脑适合哪种,不过还是一般推荐MBR的分区类型,具体的区别可以去查下!不做多介绍了!然后点击开始就好了,等待镜像制作完毕!
重装系统时就是插入电脑上重启时,进入 BIOS 的界面(一般是按F10或者F12,这个看电脑类型吧,可以查看下自己的电脑是哪种!)进入后就可以选择install Ubuntu Now,这个要提前备好份哦,提醒再提醒!
不过对于这个时代的妹子或者汉子来说,装个windows就好啦,对于Ubuntu,喜欢折腾的人来玩一下吧,还是不错的,练练Linux操作!比比谁更秀!
当然我这里是有rufus的软件的,你也可以去网上搜,一搜就出来啦,可以直接下,免费的!
当然Ubuntu的16.04/18.04的ISO,我网盘也是有的,但是网上也是开源的啦,可以直接搜索下载。
如果有需要也可以私信小编,分享网盘链接供下载哦!




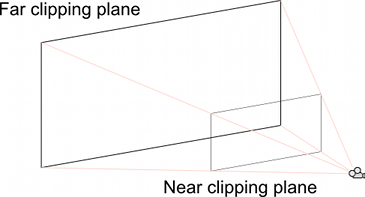



![[Unity]Screen position out of view frustum 的解决方法之一](https://img-blog.csdnimg.cn/20210719172445583.png)