重装系统后系统环境恢复
- 备份
- 安装系统
- 常用的一些deb
- vscode
- 更改sources
- pip加速
- 爬长城的家伙式儿
- 安装ROS
- 安装cmake
- 安装git
- 安装zsh
- 顺便开个ssh
- 提升幸福感的映射
- 配置neovim
- plugins
- 字体
- 插件
- 遇到的问题
- 锁键盘/鼠标
- 小玩意儿
备份
- 实验时不起眼的图
- 顺手写的脚本
- 忘记从哪儿下载的资源
安装系统
略
常用的一些deb
vscode
方便看一些文件
更改sources
-
sudo vim /etc/apt/sources.list -
ATTENTION THIS IS FOR Ubuntu20.04(ustc)
20.04:focal;18.04:bionic;16.04:xenial;14.04:trusty
# 默认注释了源码仓库,如有需要可自行取消注释 deb https://mirrors.ustc.edu.cn/ubuntu/ focal main restricted universe multiverse # deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal main restricted universe multiverse deb https://mirrors.ustc.edu.cn/ubuntu/ focal-security main restricted universe multiverse # deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal-security main restricted universe multiverse deb https://mirrors.ustc.edu.cn/ubuntu/ focal-updates main restricted universe multiverse # deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal-updates main restricted universe multiverse deb https://mirrors.ustc.edu.cn/ubuntu/ focal-backports main restricted universe multiverse # deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal-backports main restricted universe multiverse # 预发布软件源,不建议启用 # deb https://mirrors.ustc.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse # deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse- 换源之后可能会导致
The following signatures couldn't be verified because the public key is not available: NO_PUBKEY [一串字符]sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys [一串字符]
- 换源之后可能会导致
-
公司自建源
pip加速
-
pip configuration
-
cd && mkdir .pip && cd .pip && touch pip.conf[global]index-url = http://pypi.doubanio.com/simpletrusted-host = pypi.doubanio.comdisable-pip-version-check = truetimeout = 60[freeze]timeout = 10
爬长城的家伙式儿
略
安装ROS
安装cmake
安装git
安装zsh
超酷炫的zsh配置
sudo apt install zshsh -c "$(curl -fsSL https://raw.github.com/ohmyzsh/ohmyzsh/master/tools/install.sh)"- install sh
顺便开个ssh
sudo apt-get install openssh-server
提升幸福感的映射
- MY ALIAS
alias mk="cmake .. && make -j16 && make package"alias nv="nvim"
配置neovim
- ubuntu18.04这样安装默认是0.6.1版本
sudo apt-add-repository ppa:neovim-ppa/stablesudo apt-get updatesudo apt-get install neovim
- 可以源码编译0.8.2
plugins
- 参考init.vim, 放在~/.config/nvim/下
字体
- 在输入nv / nvim时, MRU(The Most Recently Used)显示乱码
- 下载Droid Sans Mono Nerd Font Complete Mono字体
- 双击后点击Install
- 在terminal中选择-preference -> profile -> Text -> Custom font选择下载安装的字体
- 下载Droid Sans Mono Nerd Font Complete Mono字体
插件
- coc需要安装nodejs, >= 12.12, copilot需要 >= 16.x
- 如果已经安装, 需要remove
sudo apt-get purge --auto-remove nodejs
- 如果没有装curl指令
sudo apt-get install curl
- 安装nodejs
curl -sL https://deb.nodesource.com/setup_16.x | sudo -E bash -sudo apt-get install -y nodejs
- 更新coc版本
- yarn install
- auto-save需要coc
- 如果已经安装, 需要remove
- CocInstall coc-marketplace
- 可以直接在vim里面进行插件管理
- CocList marketplace python就是搜索python相关的插件
- coc中的自动补全会和tab(缩进)冲突
- [coc.nvim] Jedi error: import jedi
- pip3 install jedi
- pip3 show jedi
- 在coc-settings.json中添加 “python.jediPath”: path
遇到的问题
- E117: Unknown function: SemshiBufWipeout
- UpdateRemotePlugins
- E319: No “python3” provider found. Run “:checkhealth provider”
- pip install neovim
- E605: Exception not caught: Error on request: Vim(return):Error invoking ‘format’ on channel 3 (coc):^@Format provider not found for buffer: 2
- .clang-format
锁键盘/鼠标
-
sudo apt-get install xtrlock -
sudo touch /usr/local/bin/lockkbmouse -
sudo vim /usr/local/bin/lockkbmouse#!/usr/bin/env/ bash sleep 1 && xtrlock -
shortcut
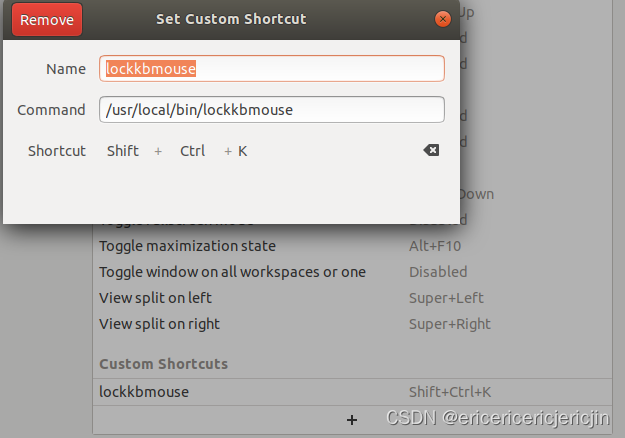
- ubuntu20.04
bash -c "sleep 1 && xtrlock"
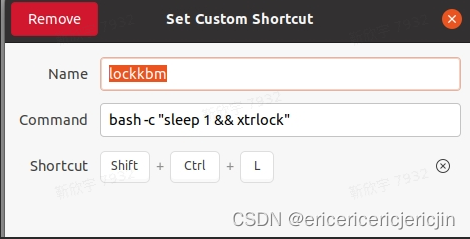
- ubuntu20.04
小玩意儿
- bastet(俄罗斯方块)



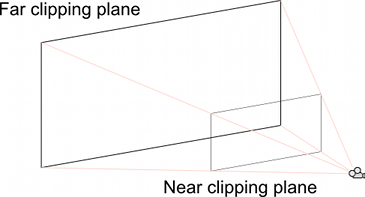



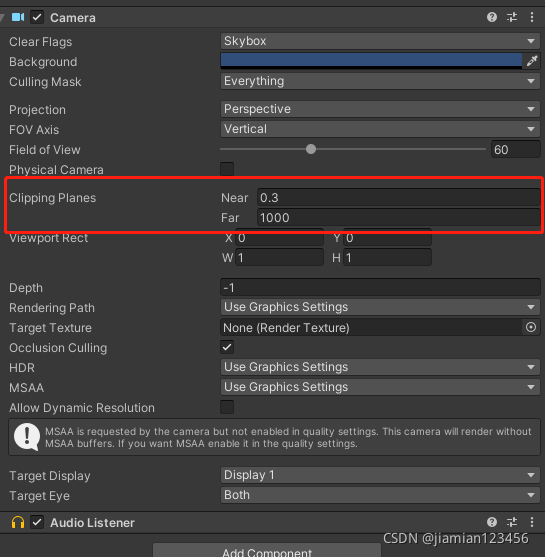
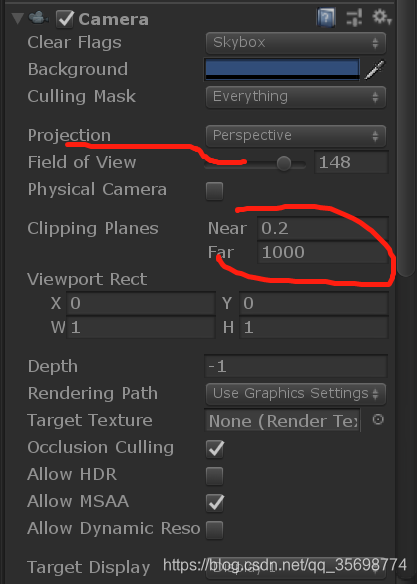
![[Unity]Screen position out of view frustum 的解决方法之一](https://img-blog.csdnimg.cn/20210719172445583.png)