目录
1、删除旧分区
1.1删除除EFI分区外的Ubuntu分区
1.2删除EFI分区
2、安装Ubuntu
首先抱抱点进这个标题的小伙伴,你们一定是饱受现在系统的折磨才选择重装的。
(答主也经历过,项目竞标的前两天系统崩溃,只能重装,几个通宵配置的所有环境和代码全部清空,从零开始,最后两天不眠不休...)
不过不要沮丧!虽然重装系统可能意味着从头再来,但也要比修复半天bug还不一定解决来得快!现在我们要做的就是尽量减少损失,尤其是时间成本。
下面,答主讲分享自己用过的最简单的重装方案,希望可以帮助到和我一样艰难奋战的小伙伴们。
1、删除旧分区
1.1删除除EFI分区外的Ubuntu分区
首先打开windows系统→右键“计算机”→选择“管理”→点击“磁盘管理”
在这里你可以看到安装Ubuntu时创建的几个分区,如图所示

狠狠删掉它!
右键分区→删除卷
这里你会发现,并不是所有的分区都可以直接删除。可以删除的是Ubuntu主分区,不能删除的则是EFI分区,系统为防止用户误删这部分的重要内容,会默认关闭这一部分的删除选项(删除卷为灰色)
1.2删除EFI分区
但这依然难不倒我们,
1、WIN+R,输入cmd,打开命令行。
2、输入diskpart命令

这里在无额外配置情况下,一般会出现两个磁盘,磁盘0和磁盘1, 我们之前在存储/磁盘管理见到了ubuntu的分区在磁盘1上,因此选择对应的磁盘1。
3、使用
sel disk 1选中磁盘14、输入
list partition命令查看磁盘1下的分区

这里可以发现,分区4就是我们需要删除的EFI分区。
5、使用
sel partition 4命令选中分区46、在命令栏输入
SET ID=ebd0a0a2-b9e5-4433-87c0-68b6b72699c7把EFI的系统分区属性变为主分区属性
现在就可以在磁盘管理把这个顽固的EFI删除啦!(右键删除卷)
删除后,所有分区会合并在一起,呈黑色,附未分配字样。

Ubuntu安装前装备工作至此完成。
2、安装Ubuntu
相信能够点进这篇文章的小伙伴对Ubuntu的安装过程一定都不陌生,但为防止大家遗忘,这里还是附上Ubuntu的安装教程链接,内容实测简洁有效,需要的小伙伴可自取。
安装Windows、Ubuntu双系统超简单实用教程
希望对大家有所帮助!

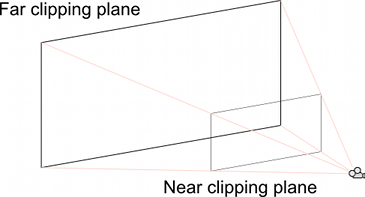



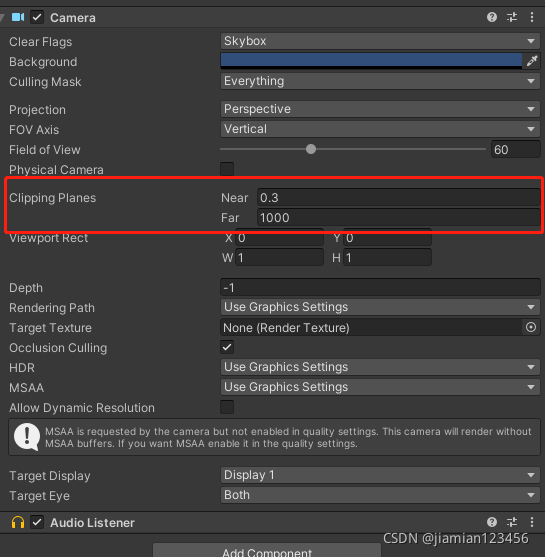
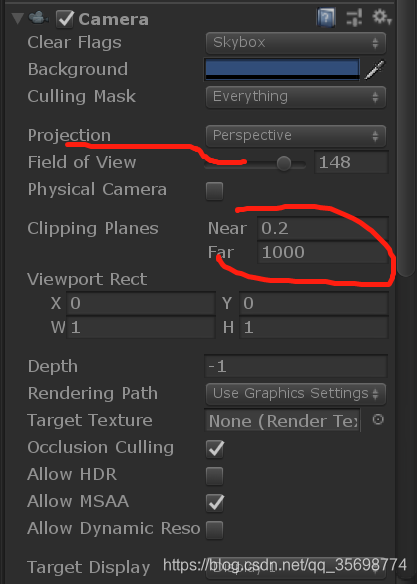
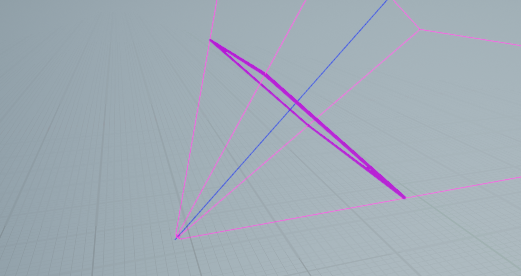
![[Unity]Screen position out of view frustum 的解决方法之一](https://img-blog.csdnimg.cn/20210719172445583.png)