仍然采取用系统盘的方式重装,本次采用直接在系统盘中再次分区的方式
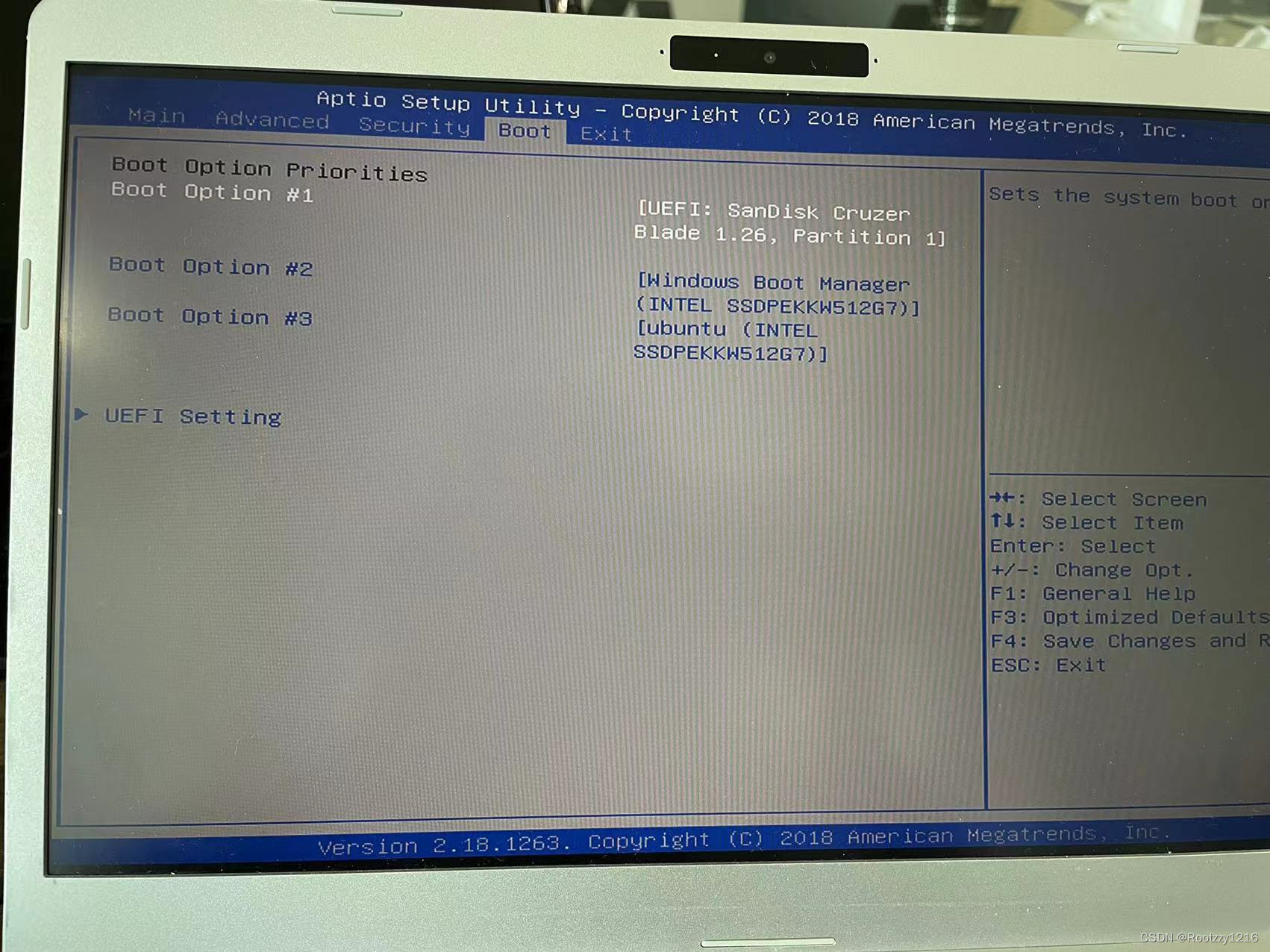
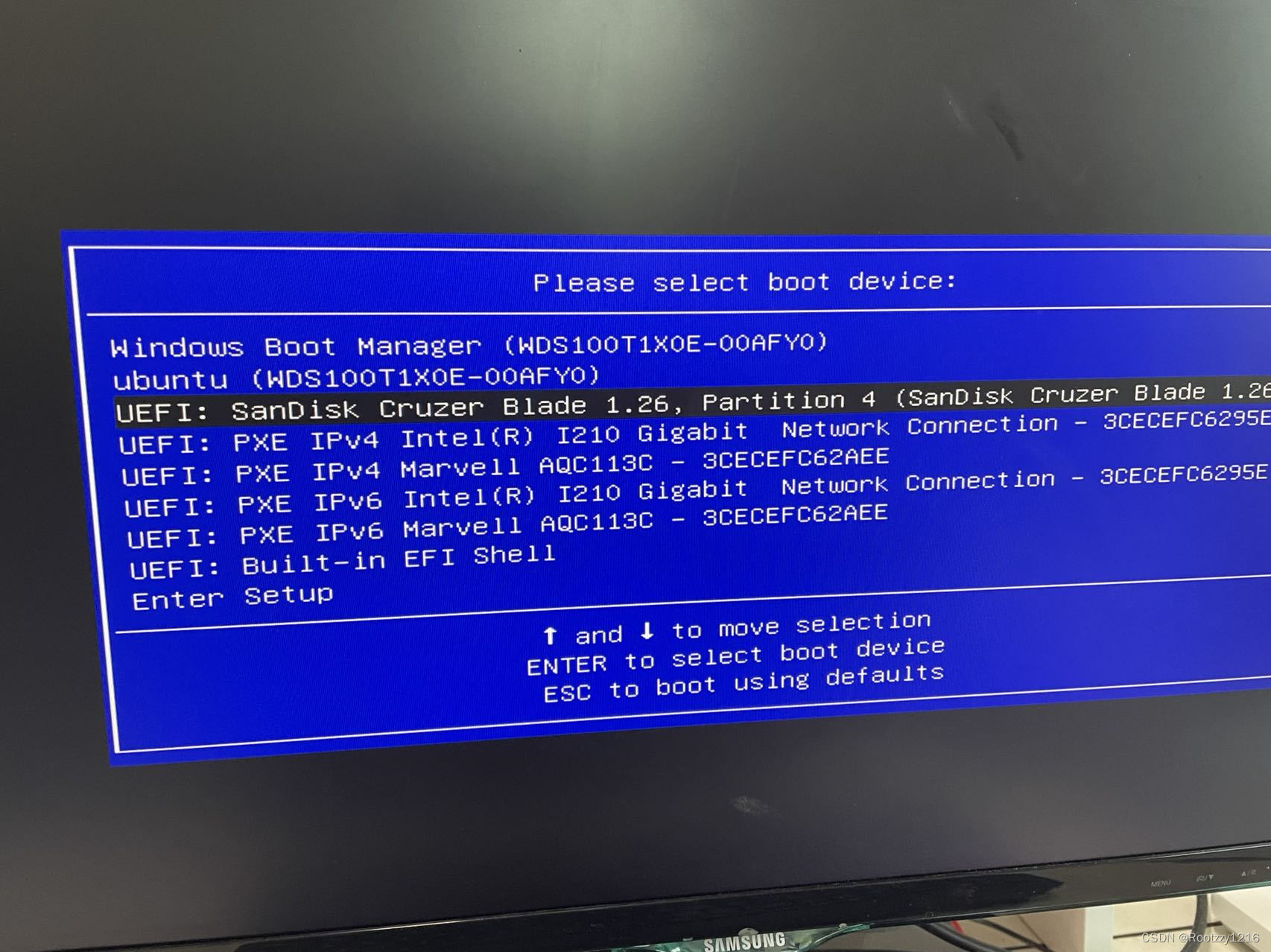
1、插入系统盘,点击电脑重启,出现图标的时候,按F1、F2、F10、F11键,进入Bios模式,选择第三列,进入内存盘,并且选择重新安装ubuntu
目前的option#1是原本的ubuntu系统,现在需要将u盘中的ubuntu(即option#3)放置到第一个。
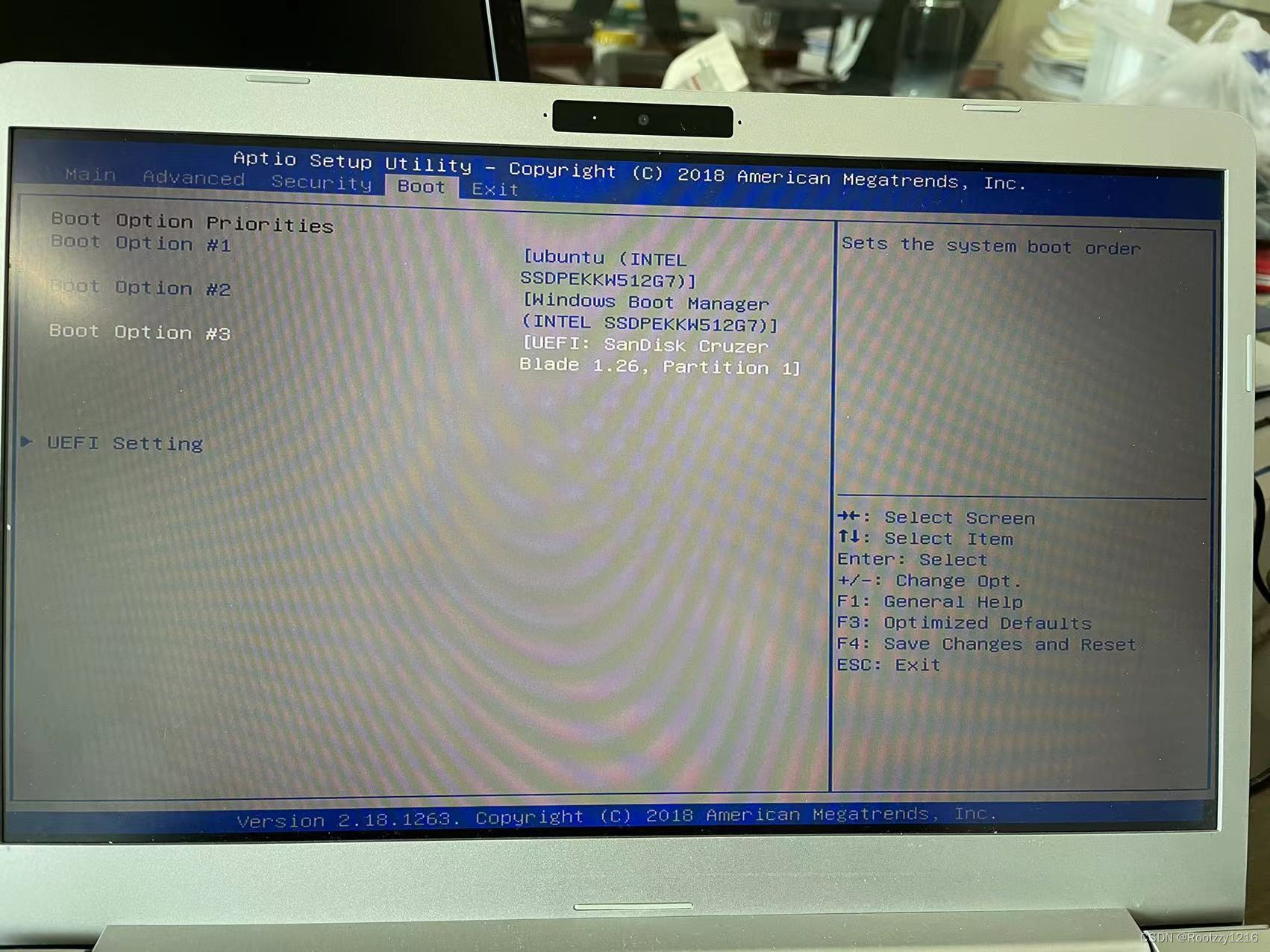
换到第三个“Sandisk Cruzer”,即从系统盘进入。
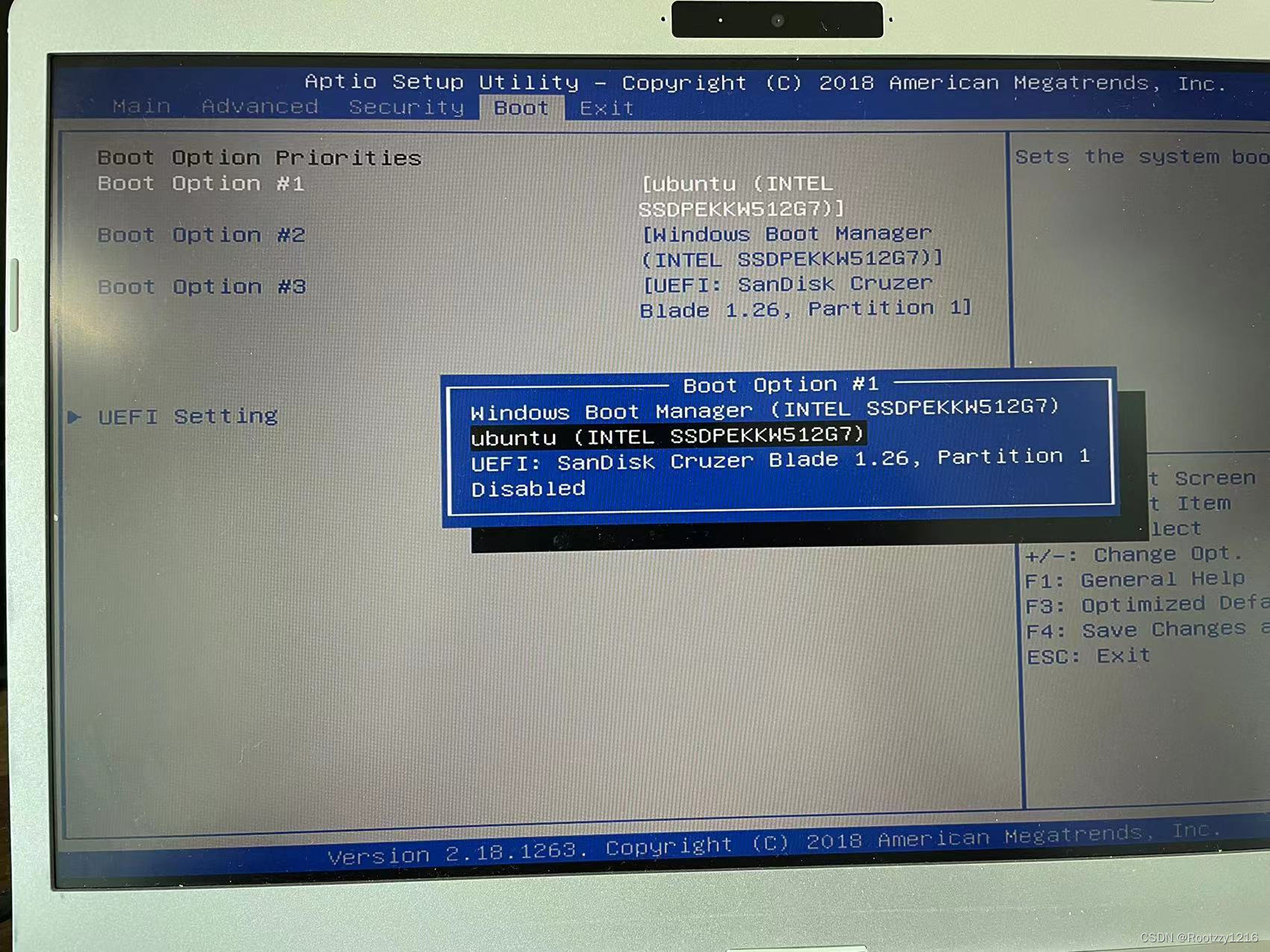
更换option1成功
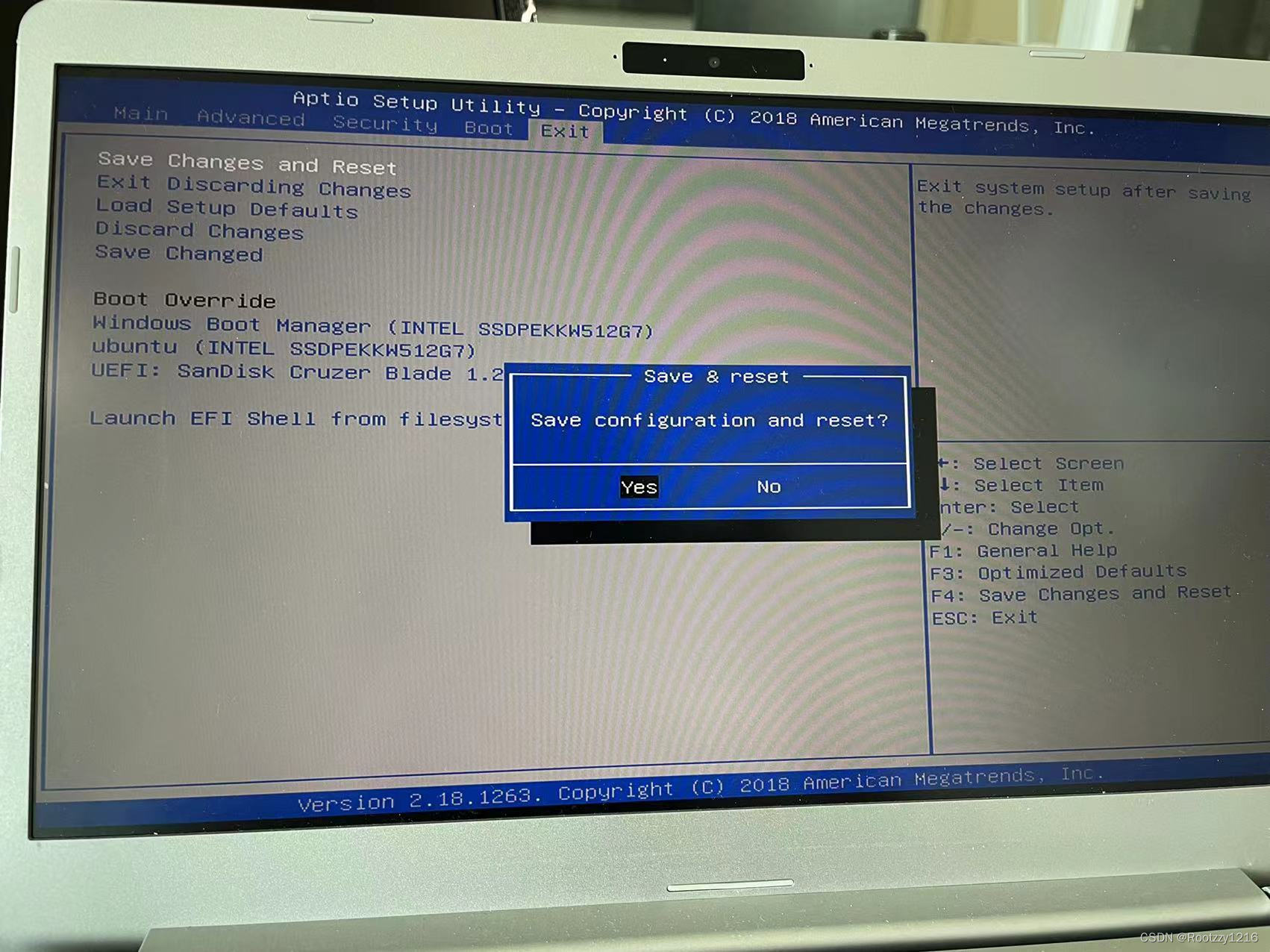
离开bios界面,并选择“save changes and reset”
参考BIOS设置图解教程(如何进入bios设置+bios设置u盘启动)_bios_操作系统_脚本之家 (jb51.net)
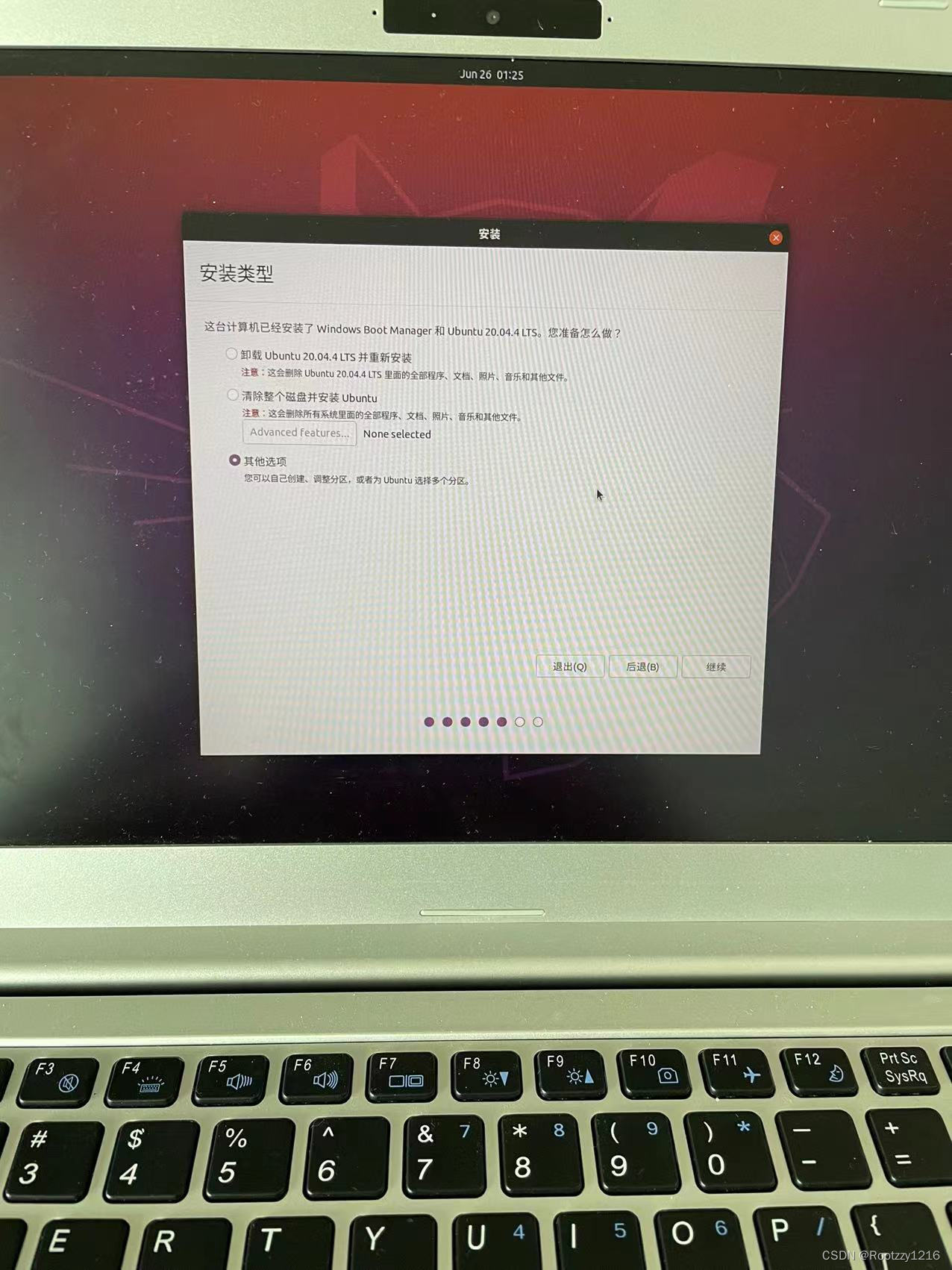
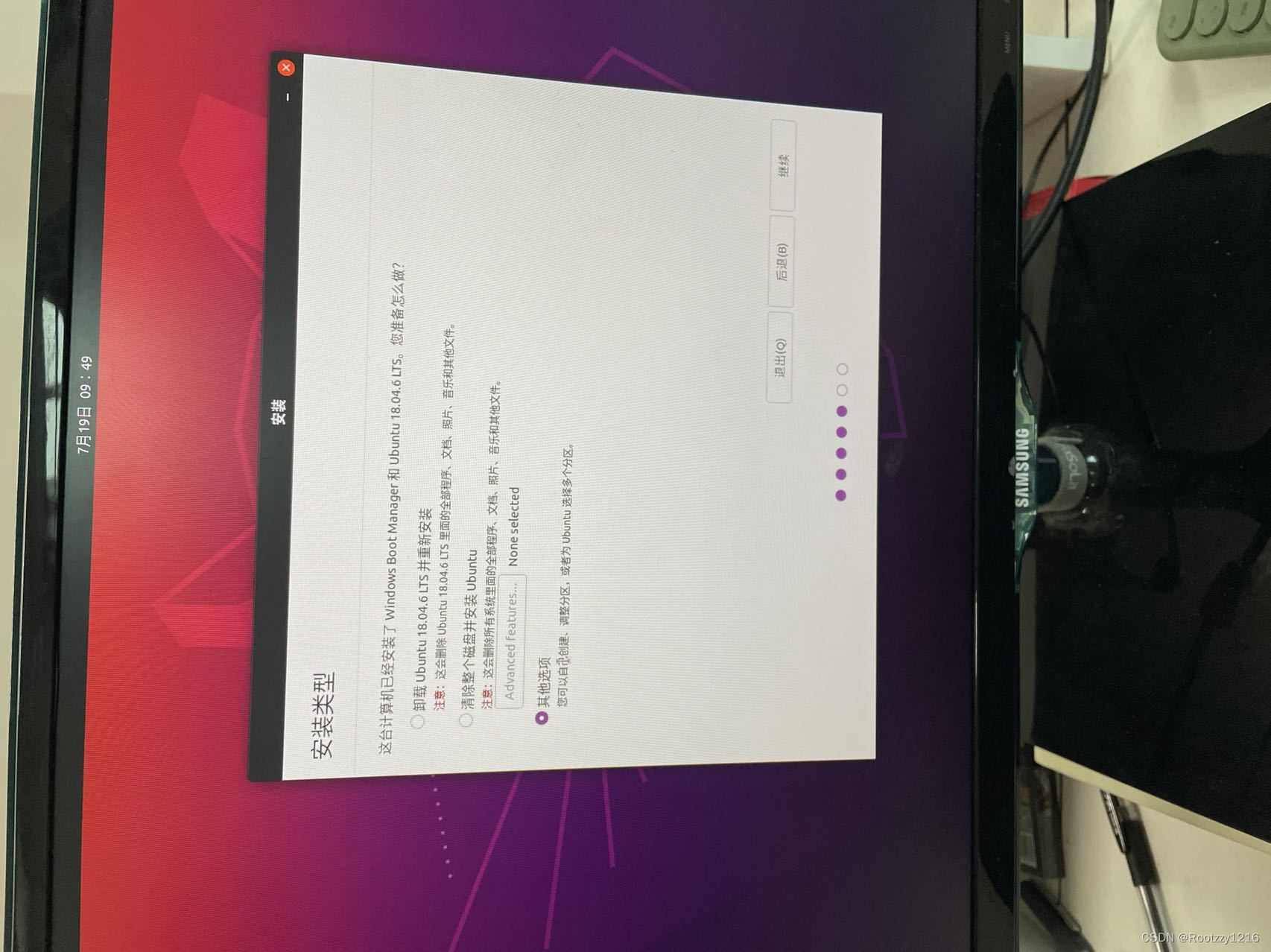
选择安装类型
2、安装过后,分区之前的步骤都可以参考(32条消息) Ubuntu20.04安装详细图文教程(双系统)_Hacah的博客-CSDN博客_ubuntu20.04安装教程
3、重新分区,找到之前分区的,我之前是分成了五个区,分别是efi、swap、挂载点/、挂载点/usr、挂载点/home
4、清空原系统的五个分区,选中分区,通过左下角的➖来进行清空
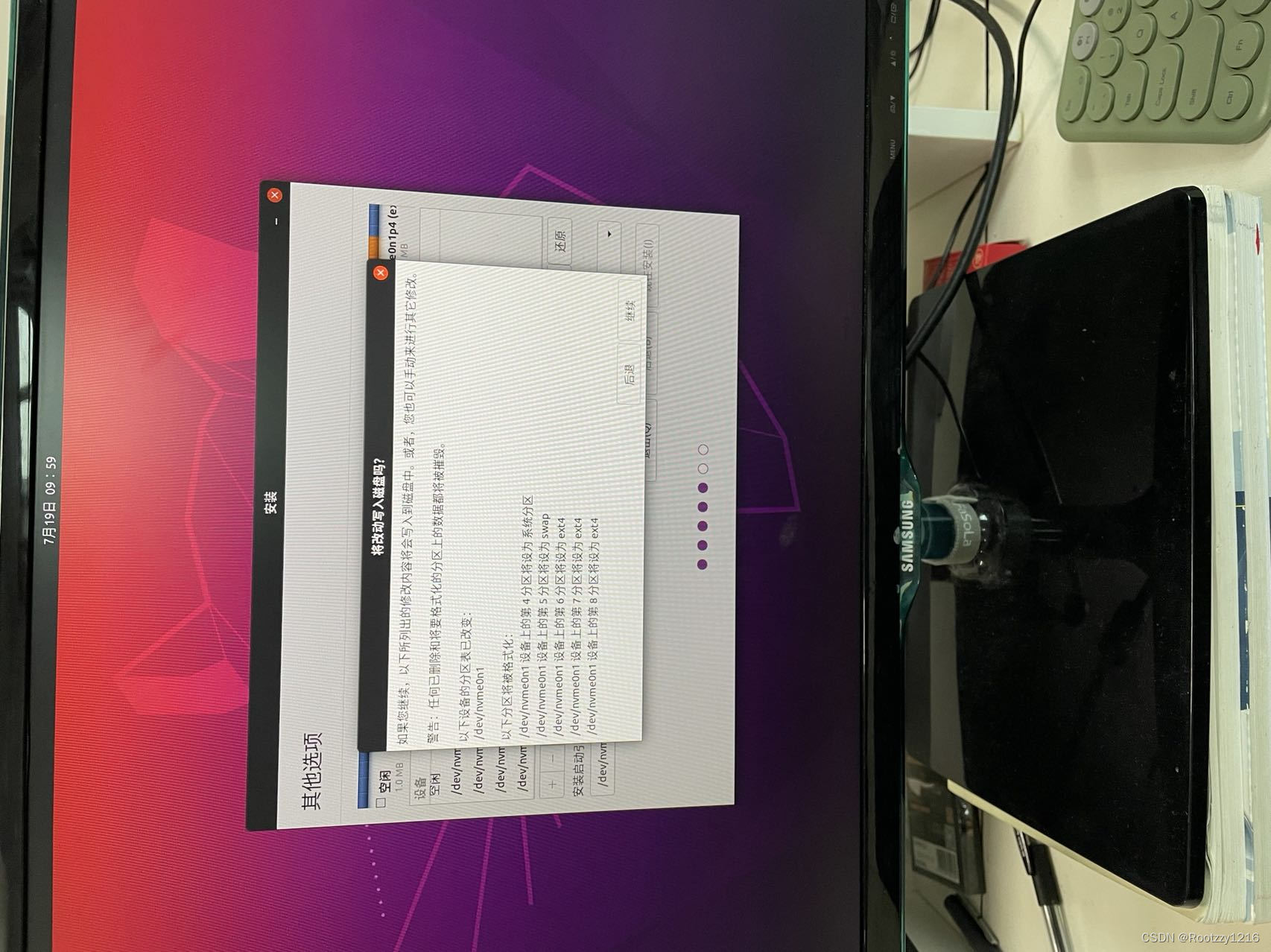
5、清空上一系统的磁盘后,会出现空闲区,接下来就开始分区
参考(32条消息) Ubuntu 20.04 系统分区_皓月星空-0-的博客-CSDN博客_ubuntu分区
我留出的空闲有300多G,电脑内存64G
所以分区的大小分别是:
efi:500M
SWAP: 64*1024M
挂载点:/ 分配80G 即 80*1024M
挂载点:/usr 分配80G 即80*1024M
挂载点:/home 剩下的全部分配给home
如果分区时遇到提示空闲不可用,尝试改变分区的挂载,试试下面分区方式:
安装Ubuntu20.04.1 LTS 单系统 - Niko-s - 博客园 (cnblogs.com)
--------------------------------------------------------------------------------------------------
记录对实验室服务器的ubuntu20.04的重装
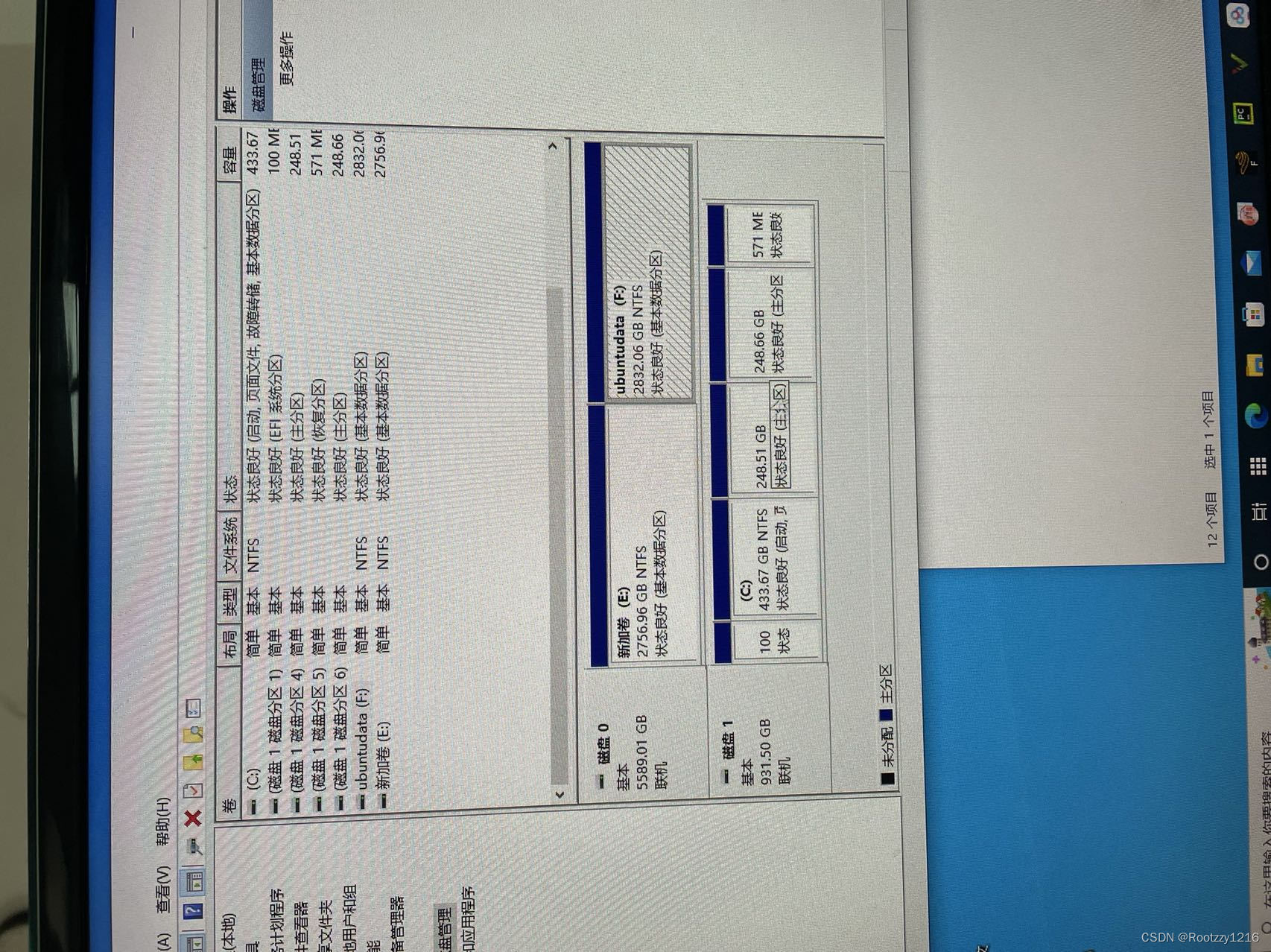
1、在win系统中看ubuntu占用的空间
磁盘1中包含着Ubuntu的系统
在win系统中卸载分区,首先卸载swap、/、/usr、/home分区。再通过终端卸载efi分区
参考:(56条消息) ubuntu 分区_Ubuntu系统卸载重装教程_weixin_39814393的博客-CSDN博客
2、插上ubuntu的U盘,重启电脑,当出现电脑图标时,按下delete键,进入BIOS界面
在boot选项中,通过-+把sandick调到#1的位置。具体方法是,在#1的位置上用-号change
选择sandiskU盘
3、选择自行分盘
4、开始给系统重新分盘
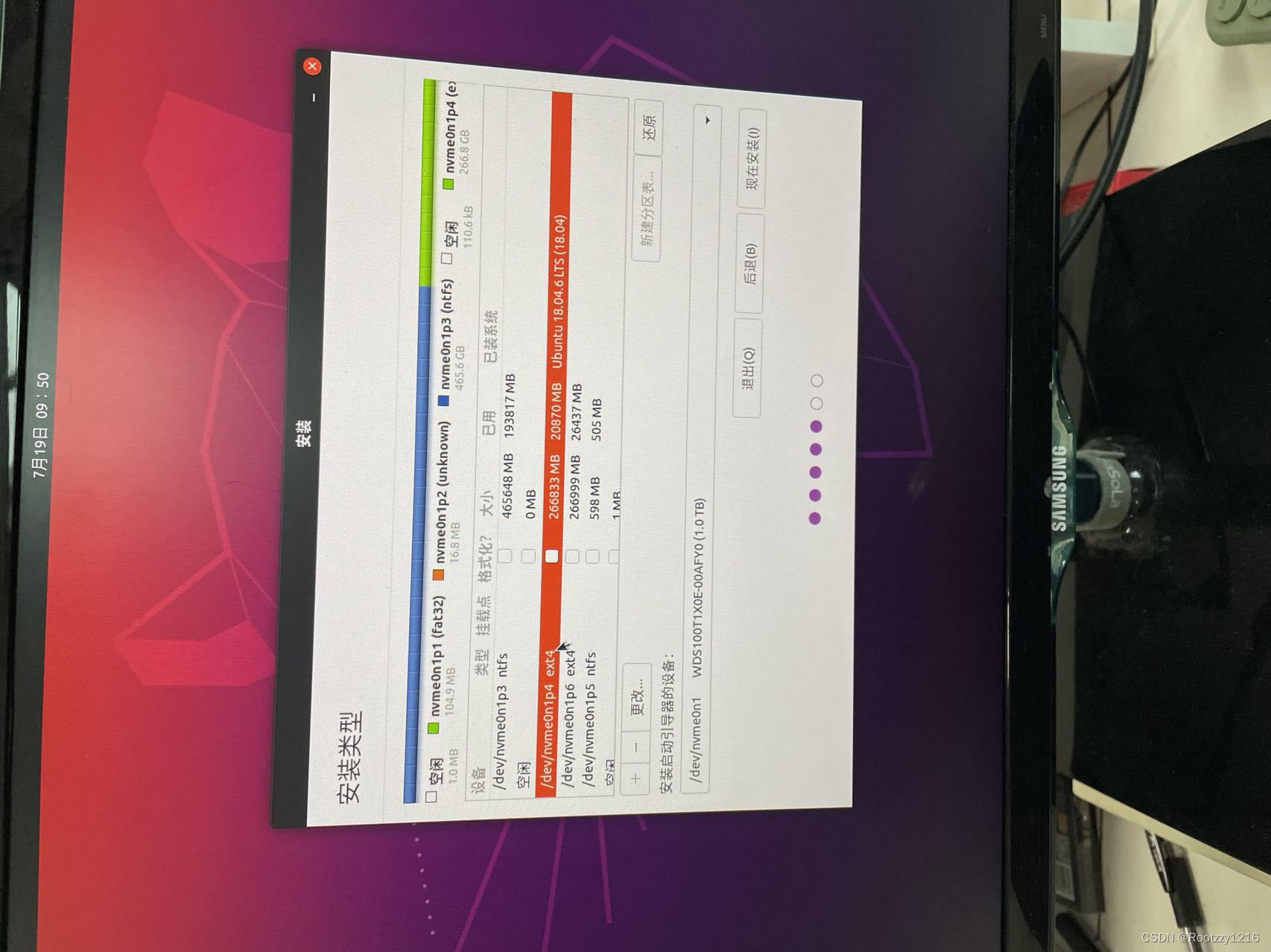
p4、p5、p6都是上一个ubuntu所占用的空间。所以需要用➖,把这三个空间减去。
减去之后,会出现一个500多g的空闲空间。再通过上一次的分盘教程,重新计算比例进行分盘。
值得注意的是,第一个efi分区,分给500m即可
此服务器的内存是32g,所以给swap空间时,要合理计算。
efi:500m
swap:32*1024=32768m
剩下三个挂载点 每个167055
分到最后的三个分区,可以将剩余的空间平均分配。






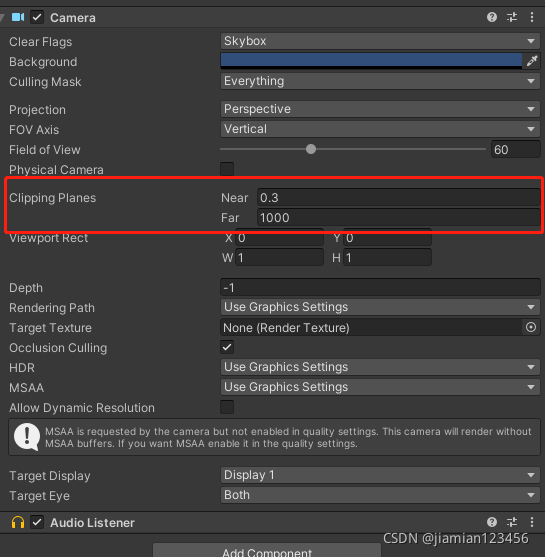
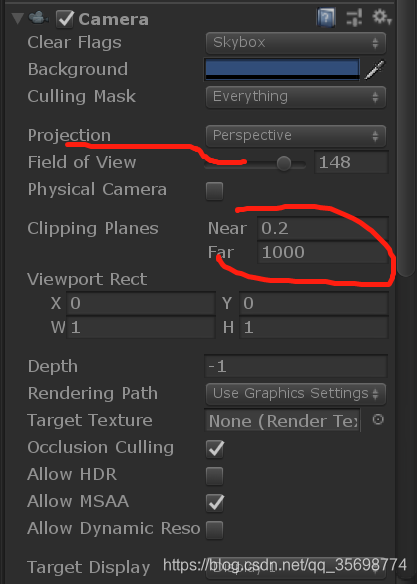
![[Unity]Screen position out of view frustum 的解决方法之一](https://img-blog.csdnimg.cn/20210719172445583.png)