Mission Planner初学者安装调试教程指南(APM或PIX飞控)3——连接与烧录
目录
1.连接方式
2.烧录固件
1.连接方式
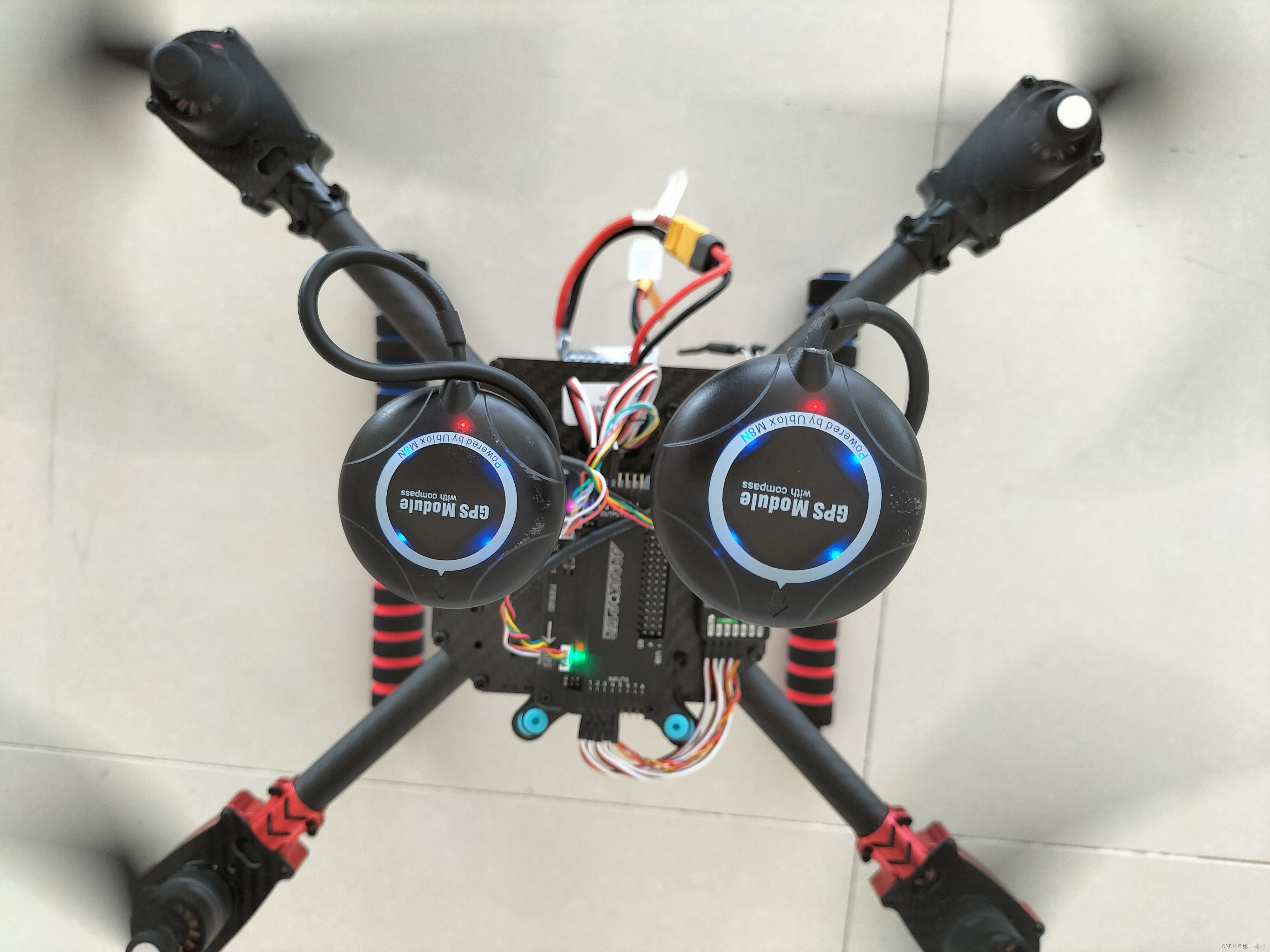
通常可以使用micro USB数据线直接连接APM(pixhawk),将数据线一头接入电脑usb口,另一头接入飞控调试接口。注意,必须使用具有数据传输功能的连接线,使用只有充电功能的连接线或接触不良的连接线将无法链接。另外,APM micro USB插口容易脱落,必须操作时正直插入,在后续带线翻转时轻柔操作,在安装遥控器接收机时注意留出APM micro USB插口富余量,为避免调试受阻,通常可以安装在micro USB插口另外一侧。
如果训练机反复插拔造成USB尾插脱落或解除不良,可以进行焊接。焊接不适合用普通电洛铁,需要使用紧密元件专用的焊锡等工具,详情见后续。

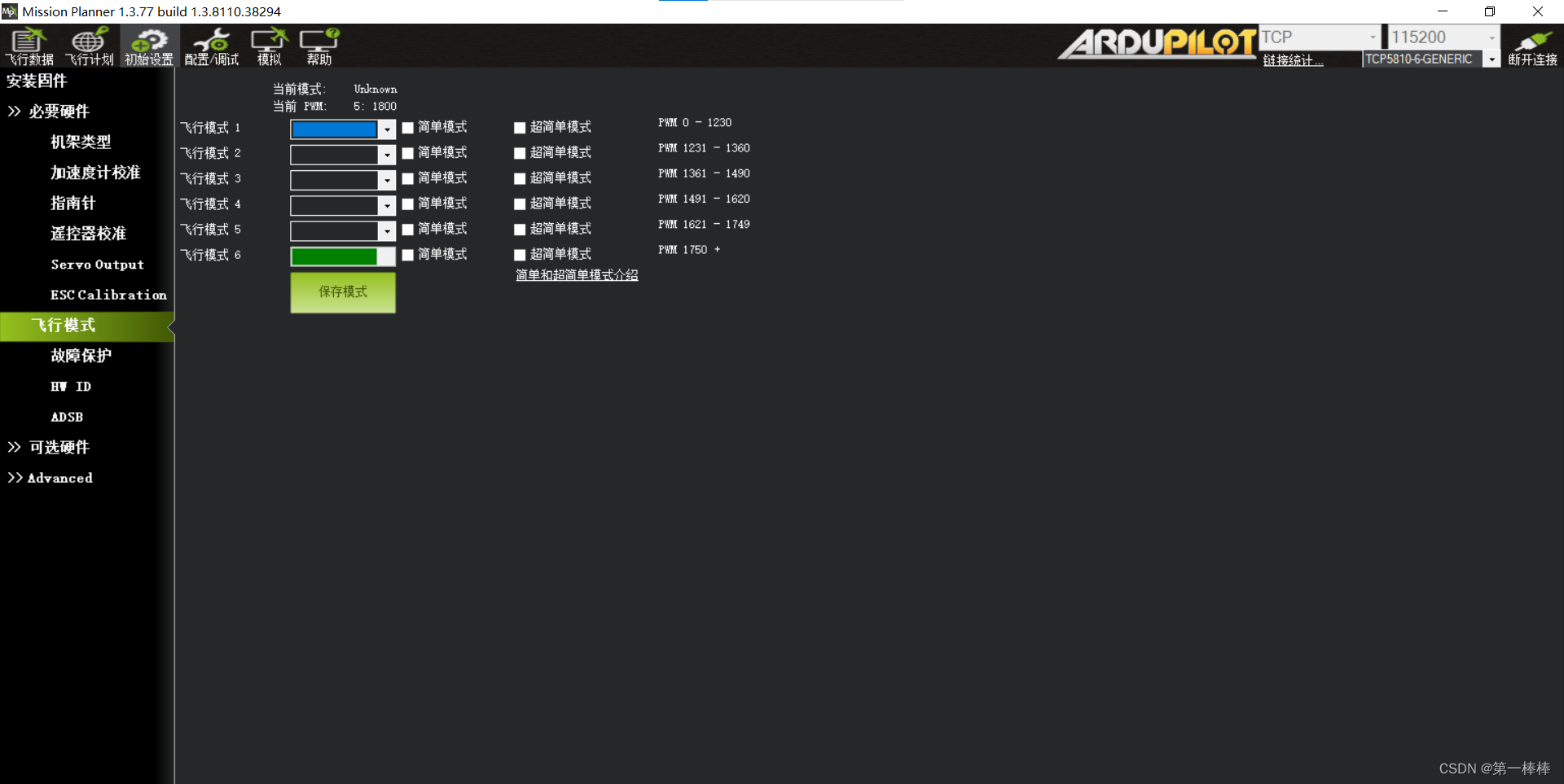
波特率选115200。COM端选择接入飞控后识别的端口(前提是成功安装了驱动程序。)
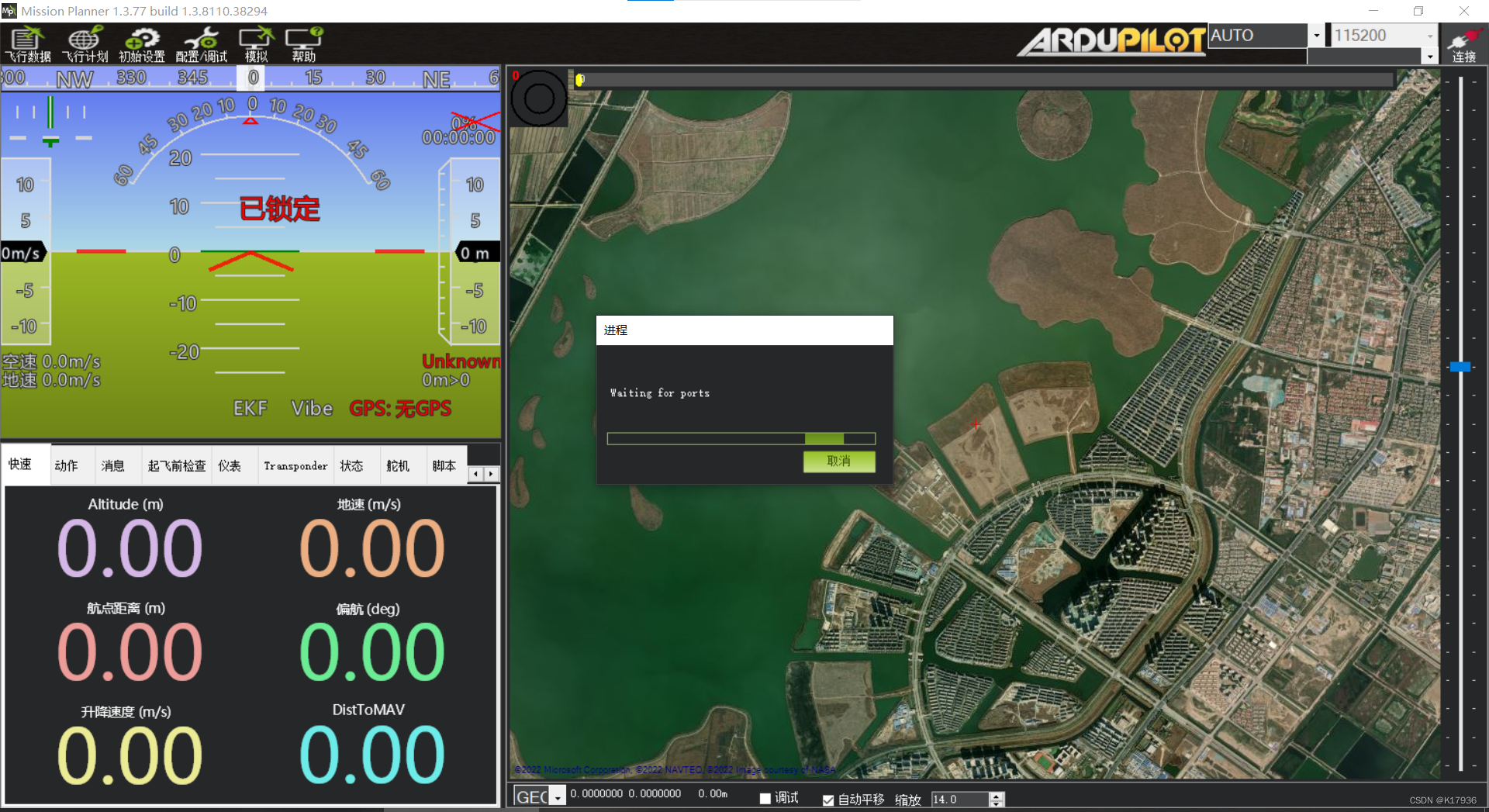
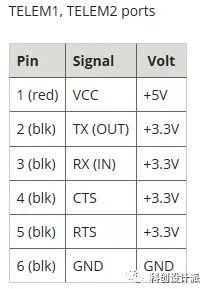
还可以通过数传链接。地面站选择特定端口号,波特率一般都是57600(另外介绍)
可通过TCP链接。
2.烧录固件
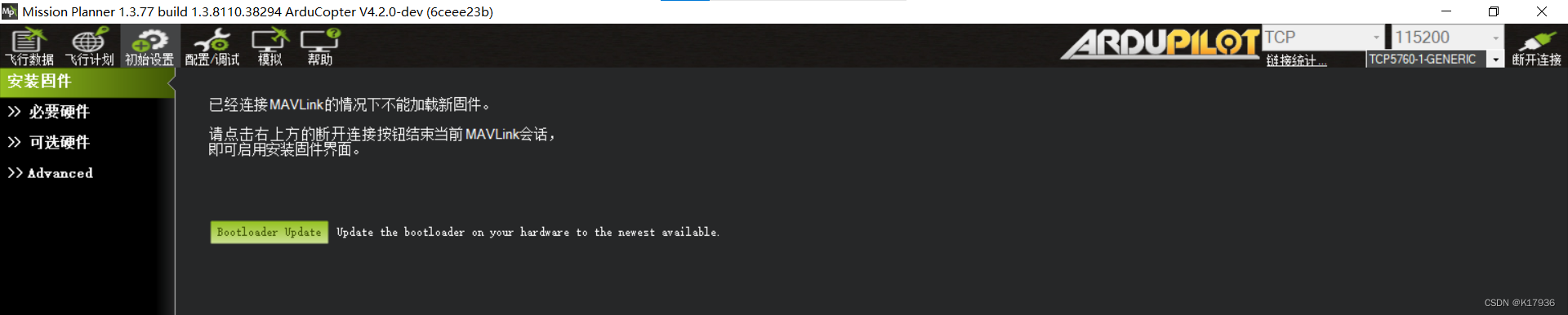
首先连接数据线,但是要点击右上角断开连接。否则出现如下提示。
打开初始设置 ——安装固件——选择需要烧录的固件类型,多旋翼无人机选择copter。
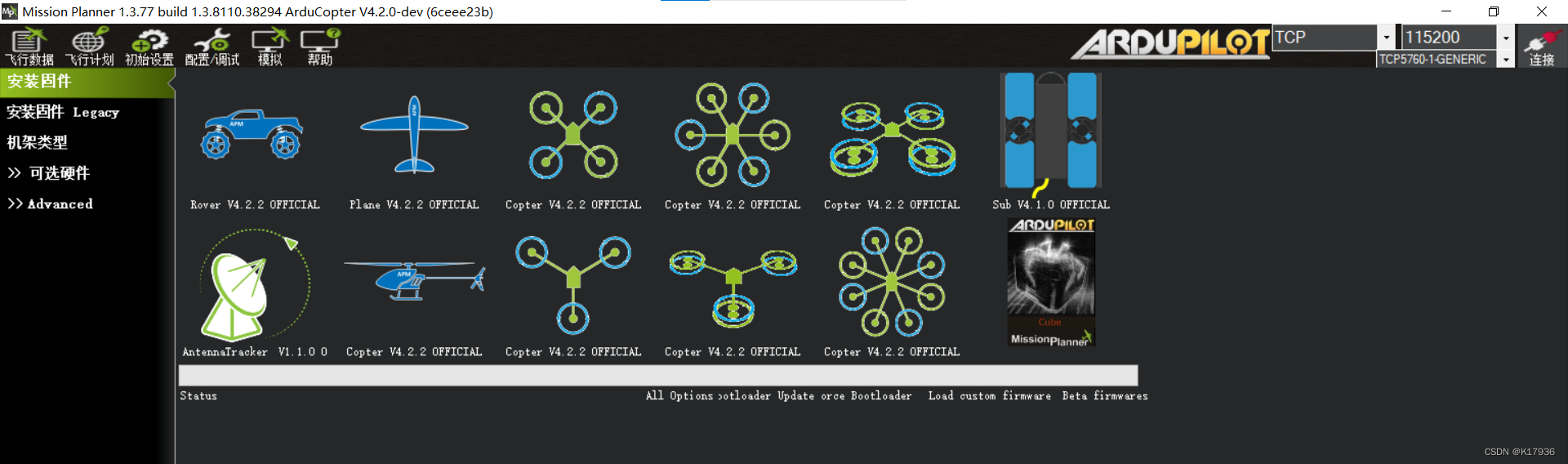
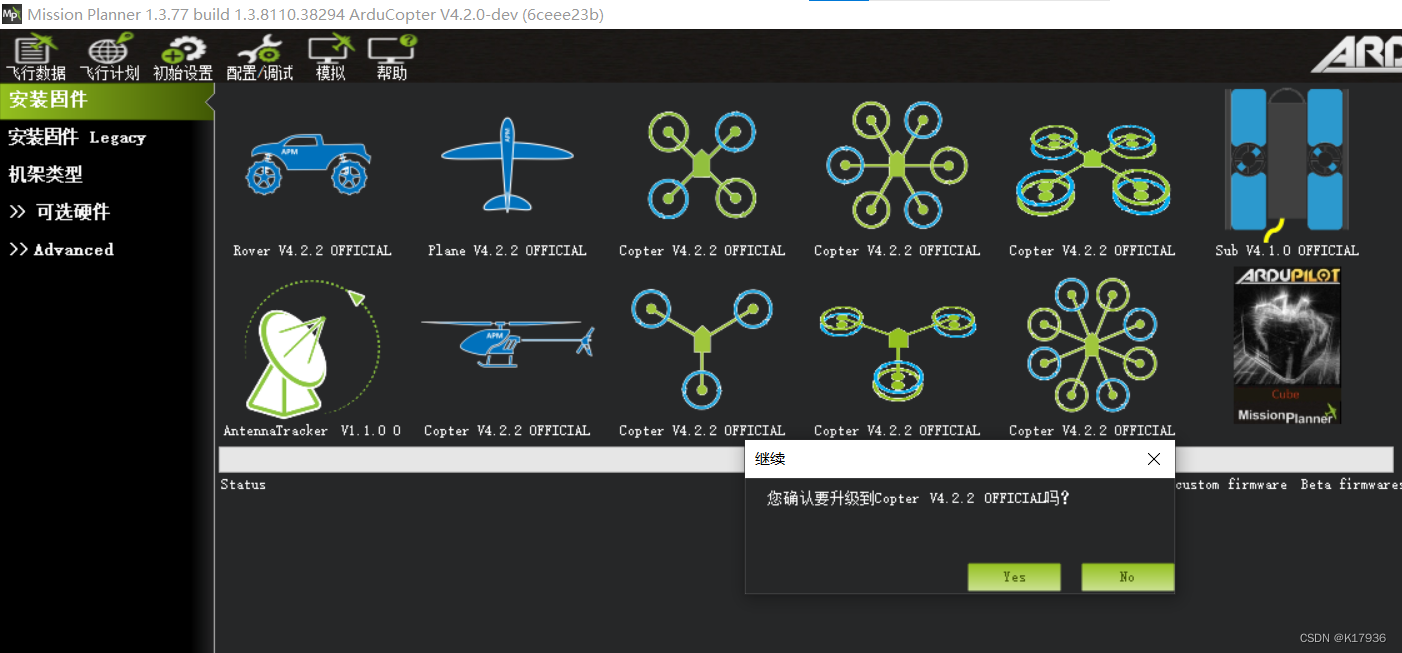
也可以选择存储到计算机的本地固件。点击进度条右下
load custom firmware