本文章代码已上传Github:
https://github.com/Kevincoooool/2017_Follow
有兴趣的可以加个STAR
自从17年国赛之后,自己做了openmv,加了很多群,也了解到很多人都在想着这个题。
第一版
第二版
第三版
我们做国赛的时候实现了全部功能,找了下题目,这篇文章就以这道题来讲吧。


题目:
看到题相信大家都送了口气,不是巡线,不用去思考怎么识别直线、曲线、直角、起点圆啊这些,因为在赛前我们队一直在想着怎么用OV7670或者OV2640来实现这些东西的识别,那段时间也确实找到了段资料:
http://blog.csdn.net/hello_world12138/article/details/51974092
这位大佬写的相当详细,大家也可以参考下来写自己的识别算法。
而我们采用的方案是OpenMV+PixHawk+STM32F4
这种方案就是最省事,不需要自己写飞控,不需要去调姿态的PID,对于玩过PIX的人来说最方便。
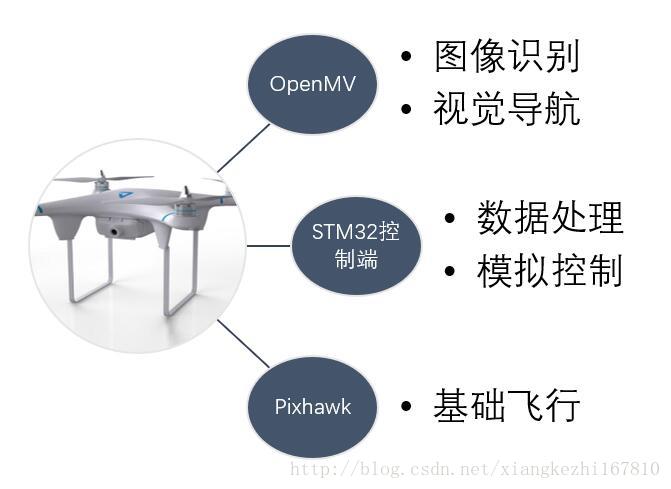
OPENMV负责图像的采集和处理,PIX负责飞机的基础稳定飞行和定高,STM32负责控制PIX怎么飞,也就是用32来模拟了一个遥控器,输出PWM波后经过PPM编码器转换成PPM信号给pix就能用32控制pix啦。
一、OPENMV的设计
当时我们是买的官方代理的OPENMV3,价格388呢,还好能报销哈哈,用openmv实现了对地面黑点的检测,然后通过串口3把黑点的坐标值传回给STM32。
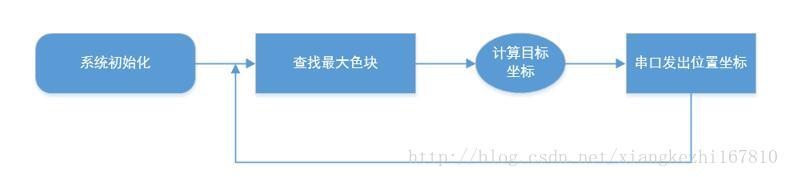
OPENMV寻找黑点串口输出程序
# 寻找黑点串口输出程序 - By: Kevincoooool - 周四 11月 23 2017
import sensor,time,pyb,math
from pyb import Pin, Timer, LED, UART
#黑色点阈值
black_threshold = [(0, 64)]
#xy平面误差数据
err_x = 0
err_y = 0
#发送数据
uart_buf = bytearray([0x55,0xAA,0x00,0x00,0x00,0x00,0xAA])#串口三配置
uart = UART(3, 115200)
uart.init(115200, bits=8, parity=None, stop=1)sensor.reset()
sensor.set_pixformat(sensor.RGB565)#设置灰度信息
sensor.set_framesize(sensor.QQVGA)#设置图像大小
sensor.skip_frames(20)#相机自检几张图片
sensor.set_auto_whitebal(False)#关闭白平衡
clock = time.clock()#打开时钟
while(True):clock.tick()img = sensor.snapshot()#寻找blobblobs = img.find_blobs(black_threshold)if blobs:most_pixels = 0largest_blob = 0for i in range(len(blobs)):#目标区域找到的颜色块可能不止一**重点内容**个,找到最大的一个if blobs[i].pixels() > most_pixels:most_pixels = blobs[i].pixels()largest_blob = i#位置环用到的变量err_x = int(60 - blobs[largest_blob].cy())err_y = int(blobs[largest_blob].cx() - 80)img.draw_cross(blobs[largest_blob].cx(),blobs[largest_blob].cy())#调试使用img.draw_rectangle(blobs[largest_blob].rect())else:err_x = 0err_y = 0#数组中数据写入uart_buf = bytearray([0x55,err_x>>8,err_x,err_y>>8,err_y,0xAA])print(err_x,err_y)uart.write(uart_buf)二、STM32控制端程序设计
既然我们用的是STM32模拟遥控器,那我们就要先初始化两个定时器来输出八路PWM波,电调的频率基本上都是50hz,刚刚把代码贴上来了,但是想了想大家都是有基础的,这些初始化肯定会的。
一个串口用来读取OPENMV的数据,一个串口用来读取超声波模块的高度。
两个定时器用来模拟50hz的PWM波。
恩 ,对,然后就没了,最后还需要个PID控制函数来对OPENMV传回的黑点坐标值进行PID运算,转化为PIX能识别的‘遥控器’控制量即可实现定点。
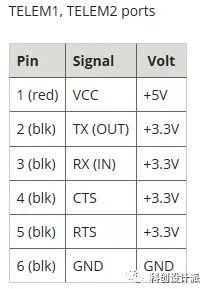
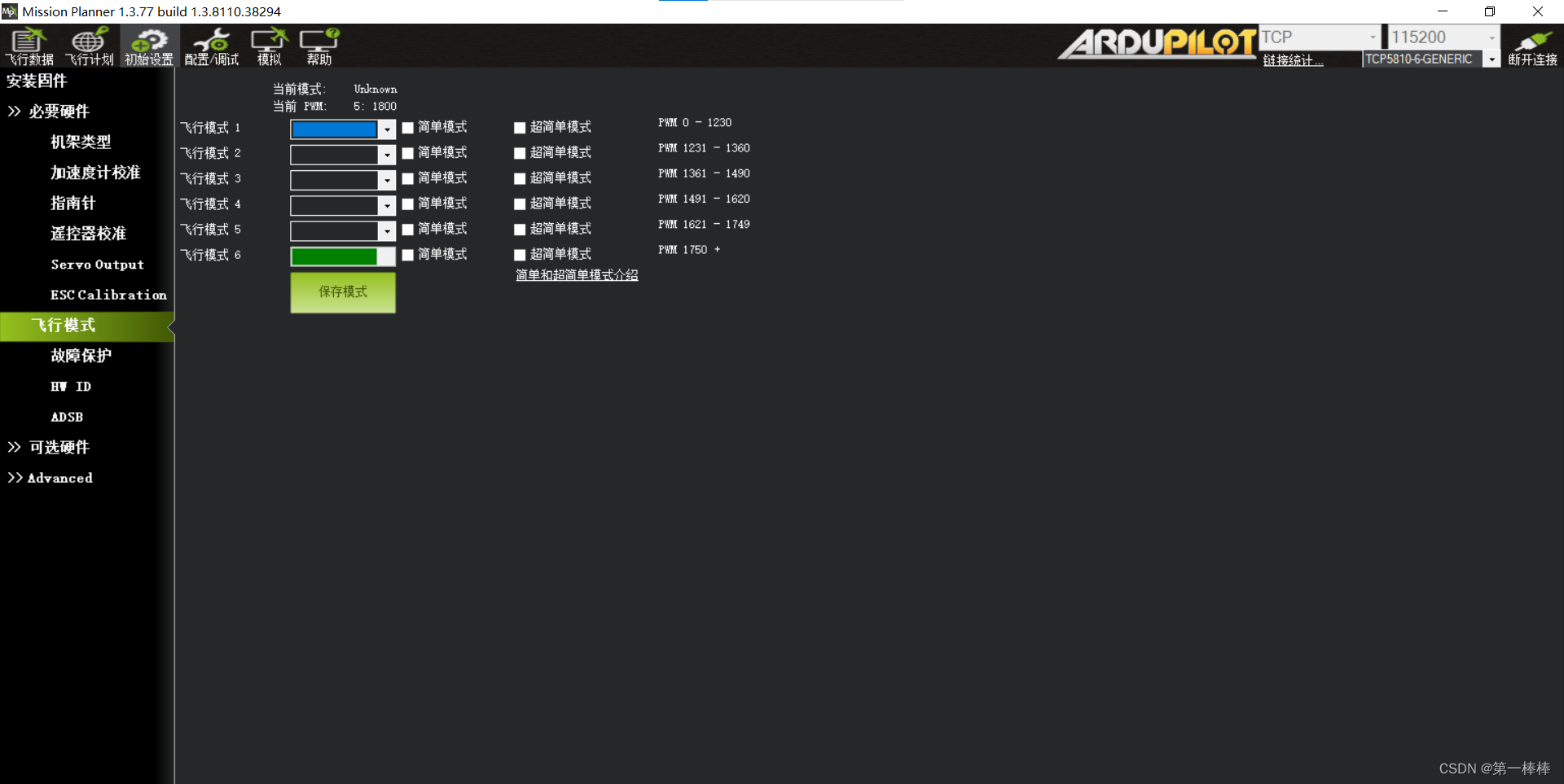
对于怎么知道模拟出来的PWM波对应的遥控器的哪个通道值,大家只有拿着遥控器一个一个对应调了,记得做好记录。
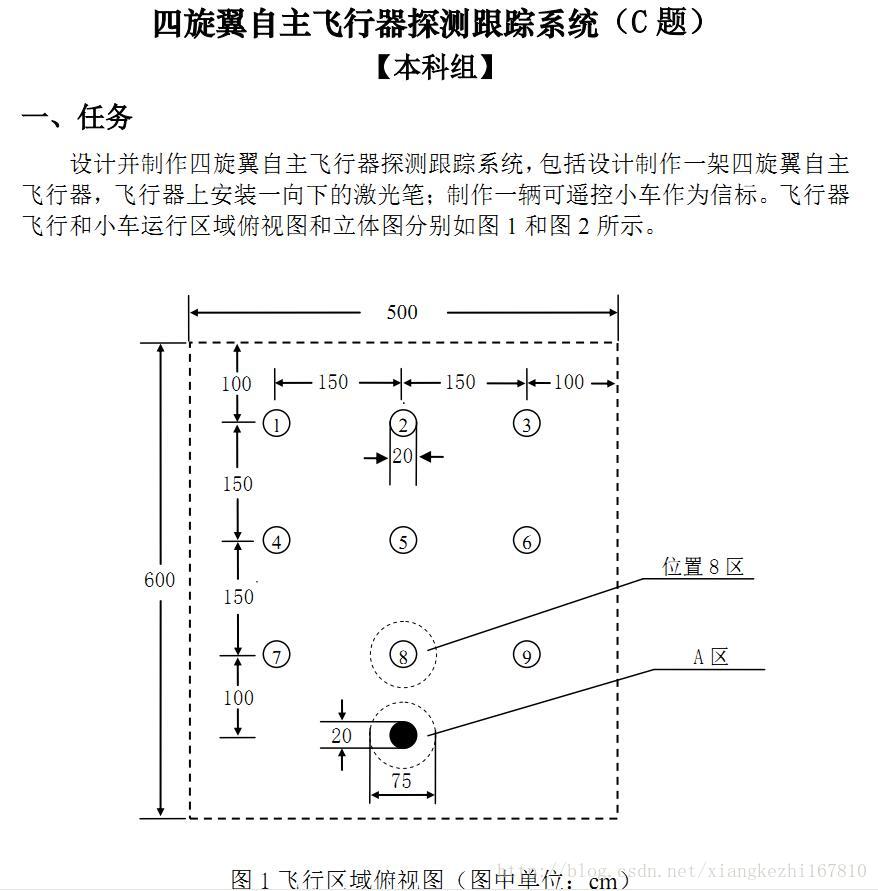
题目分析:
基础一:把飞机放在黑点上方,需要一键自动起飞到指定高度,我们采用的方法:
按键按下模式1后,先模拟遥控器对PIX解锁、然后开始起飞,油门逐渐增加,增加的同时当高度高于20cm就开启定点,当飞机高度到达指定高度后开启定高模式,因为PIX的气压计定高不是很准,所以我们人为加了定高的修正,高度大于目标值就拉低油门,低于目标值就拉高油门,定高的同时也在定点,然后开始计时,到达指定时间,大幅拉低油门,自动降落。
主函数
int main(void)
{ NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2delay_init(168); //初始化延时函数uart_init(115200);//初始化串口波特率为115200uart2_init(9600);uart3_init(115200);LED_Init();KEY_Init();IIC_Init(); //IIC初始化OLED_Init();OLED_Clear();TIM3_PWM_Init(20000-1,84-1); //84M/84=1Mhz的计数频率,重装载值20000,所以PWM频率为 1M/20000=50hz. TIM4_PWM_Init(20000-1,84-1); //84M/84=1Mhz的计数频率,重装载值20000,所以PWM频率为 1M/20000=50hz. TIM2_Int_Init(10-1,8400-1);while(1){Fly_Mode = 0;OLED_Clear();while(!Fly_Mode){Fly_Mode=KEY_Scan();OLED_ShowNum(0, 2, Fly_Mode, 1, 16);OLED_ShowUnNum(0, 0, hight, 3, 16);}OLED_ShowNum(0, 2, Fly_Mode, 1, 16);LED = 0;delay_ms(200);LED = 1;switch (Fly_Mode){case 1:Take_off();Start_Fixed_high();while(1){ if(PID_flag == 1){PID_flag = 0;PositionPID();High_fix();} SStart_flag = 1;if(S_flag == 1){S_flag = 0;i++;}if(i == 300){i = 0;SStart_flag = 0;Land_down();break;}}break;case 2:Take_off();Start_Fixed_high();while(1){ if(PID_flag == 1){PID_flag = 0;PositionPID();High_fix();} SStart_flag = 1;//1s开始计时if(S_flag == 1){S_flag = 0;i++;}//计时盲飞if(i == 100){mang_flag = 1;}//忙飞结束if(i == 120){mang_flag = 0; }//计时降落if(i == 200){i = 0;SStart_flag = 0;Land_down();break;}}break;case 3:break;case 4:break;case 5:break;default:Land_down();break; }}
}
串口解析OPENMV数据函数
void Vision_datadeal(void)
{int tmp, tmp1, tmp2;USART_SendData(USART2, 0x55); //向串口2发送数据PID_flag = 1;if(USART3_RX_BUF[0]==0x55 && USART3_RX_BUF[5]==0xAA){ /*接收视觉模块发来的信息*/if(USART3_Flage){ USART3_Flage=0;tmp=((int)USART2_RX_BUF[0]<<8) + USART2_RX_BUF[1];hight=tmp/10; //除以 1000 转化为单位 M{/* Target_Roll */tmp1=((int16_t)USART3_RX_BUF[1]<<8) + USART3_RX_BUF[2];tmp1 = Median_filer1(tmp1);if(tmp1>=32768){tmp1 = tmp1-0xffff;} else{tmp1 =tmp1;}pixX = tmp1;/* Target_Pitch */tmp2=((int16_t)USART3_RX_BUF[3]<<8) + USART3_RX_BUF[4];tmp2 = Median_filer2(tmp2);if(tmp2>=32768){tmp2 = tmp2-0xffff;}else{tmp2 = tmp2;}pixY = tmp2;if(Fly_Mode == 2 && mang_flag == 1){if(pixY_last == 0 && pixY - pixY_last < -50){mang_flag = 0;}else{pixY = -23;}TIM_SetCompare1(TIM3,1540); //Pitch CH1 PB4 TIM_SetCompare3(TIM3,1530); //Roll CH3 PB0 }pixY_last = pixY;} } }
}
PIX加锁函数
void lock(void)
{TIM_SetCompare1(TIM3,1500); //Pitch CH1 PB4 TIM_SetCompare2(TIM3,1000); //Throttle CH2 PB5TIM_SetCompare3(TIM3,1500); //Roll CH3 PB0 TIM_SetCompare4(TIM3,1000); //Yaw CH4 PB1TIM_SetCompare1(TIM4,1000); // CH5 PD12TIM_SetCompare2(TIM4,1000); // CH6 PD13TIM_SetCompare3(TIM4,1000); // CH7 PD14TIM_SetCompare4(TIM4,1000); // CH8 PD15delay_ms(3000);
}
解锁函数
void Unlock(void)
{TIM_SetCompare1(TIM3,1500); //Pitch CH1 PA6 TIM_SetCompare2(TIM3,1000); //Throttle CH2 PA7TIM_SetCompare3(TIM3,1500); //Roll CH3 PB0 TIM_SetCompare4(TIM3,2000); //Yaw CH4 PB1TIM_SetCompare1(TIM4,1000); // CH5 PB6TIM_SetCompare2(TIM4,1000); // CH6 PB7TIM_SetCompare3(TIM4,1000); // CH7 PB8TIM_SetCompare4(TIM4,1000); // CH8 PB9delay_ms(4000);TIM_SetCompare4(TIM3,1500); //Yaw CH4 PB1delay_ms(1000);TIM_SetCompare2(TIM3,1300); //Throttle CH2 PA7 delay_ms(500);TIM_SetCompare2(TIM3,1000); //Throttle CH2 PA7
}起飞函数
void Take_off(void)
{int Throttle=1000,Throttle_Increase=25,Hight_Last;OLED_ShowString(0,4,"Start",16);delay_ms(3000);OLED_ShowString(0,4,"Unlock",16);Unlock();Hight_Last=hight;while (hight<25){TIM_SetCompare2(TIM3,Throttle);Throttle+=Throttle_Increase;if(Throttle>=1800)Throttle=1800;delay_ms(100);if (hight-Hight_Last>1){Throttle_Increase=0;Throttle-=10;}if(hight>25){PositionPID(); }Hight_Last=hight;TIM_SetCompare1(TIM3,1540); //Pitch CH1 PB4 TIM_SetCompare3(TIM3,1530); //Roll CH3 PB0 }
// TIM_SetCompare1(TIM3,1500); //Pitch CH1 PB4
// TIM_SetCompare3(TIM3,1500); //Roll CH3 PB0
}
开启定高模式函数
void Start_Fixed_high(void)
{OLED_ShowString(0,4,"Highfix",16);TIM_SetCompare1(TIM4,1500); // CH5 PD12delay_ms(5);TIM_SetCompare2(TIM3,1500); //Throttle CH2 PB5TIM_SetCompare2(TIM3,1300);delay_ms(15);TIM_SetCompare2(TIM3,1500);
}
降落函数
void Land_down(void)
{OLED_ShowString(0,4,"Land_down",16);int j = 0;while(j <= 200){j++;TIM_SetCompare2(TIM3,1280); //Throttle CH2 PB5delay_ms(20);PositionPID();}lock();
}
PID控制函数:
/*黑点悬停控制*/
void PositionPID(void)
{static float lastVxErro,lastVyErro;static float pidVx_pOut,pidVx_dOut,pidVx_iOut;static float pidVy_pOut,pidVy_dOut,pidVy_iOut;static float pidVx_value,pidVy_value;static unsigned char flag_Y,flag_X;/***************X轴PID参数**ROLL************/float Vxkp=0.086f;//float Vxki=0.0004f;//0.001f;float Vxkd=0.027f;//-0.000531;/***************Y轴PID参数*PITCH*************/float Vykp=0.086f;float Vyki=0.0004f;//0.001f;float Vykd= 0.024f;/*X轴位移速度调整*/float vxErro=(float)(0.0f-(-pixX*hight/100));float vxErroDelta=(vxErro-lastVxErro)/0.016f;lastVxErro=vxErro;/*X轴积分分离处理*/if(vxErro <= 50.0f&&vxErro >= -50.0f){flag_X = 0;}else{flag_X = 1;}pidVx_pOut=Vxkp * vxErro;pidVx_dOut=Vxkd * vxErroDelta;pidVx_iOut+=Vxki * vxErro;if(pidVx_iOut>2.5f)//1.5pidVx_iOut=2.5f;if(pidVx_iOut<-2.5f)pidVx_iOut=-2.5f;pidVx_value=pidVx_pOut+pidVx_dOut+flag_X*pidVx_iOut;if(pidVx_value>10)pidVx_value=10;if(pidVx_value<-10)pidVx_value=-10;pidVx_value*=22;/***************Y轴PID调节***************/ /*X轴位移速度调整*/float vyErro=(float)(0.0f-(-pixY*hight/100));float vyErroDelta=(vyErro-lastVyErro)/0.016f;lastVyErro=vyErro;/*Y轴积分分离处理*/if(vyErro <= 50.0f&&vyErro >= -50.0f){flag_Y = 0;}else{flag_Y = 1;}pidVy_pOut=Vykp * vyErro;pidVy_dOut=Vykd * vyErroDelta;pidVy_iOut+=Vyki * vyErro;/*Y轴积分限幅处理*/if(pidVy_iOut>2.5f)pidVy_iOut=2.5f;if(pidVy_iOut<-2.5f)pidVy_iOut=-2.5f;pidVy_value=pidVy_pOut+pidVy_dOut+flag_Y*pidVy_iOut;/*Y轴输出限幅处理*/if(pidVy_value>10)pidVy_value=10;if(pidVy_value<-10)pidVy_value=-10;pidVy_value*=22;/************PWM赋值***************/ TIM_SetCompare1(TIM3,1500+pidVx_value); //Pitch CH1 PB4 TIM_SetCompare3(TIM3,1500+pidVy_value); //Roll CH3 PB0 TIM_SetCompare4(TIM3,1505); //Yaw CH4 PB1}
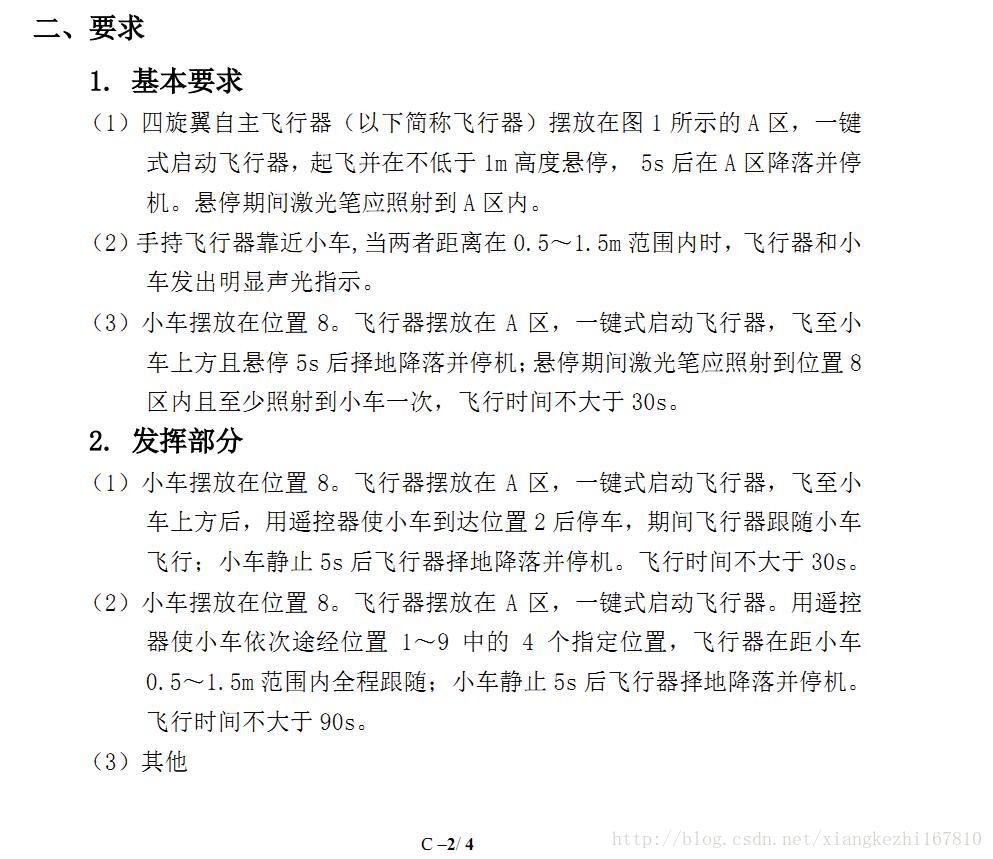
基础二:这道题是检测两个物体间的空间距离,我们用的ESP8266来做的,它可以读出附近热点的信号值,但是这种做法精度极低。最后到比赛场地时才发现居然有人用超声波测距??而且居然没扣分,很神奇了。
基础三:对于这道题,和第一道题类似,但是需要往前飞一段时间,那么我们就可以先完成基础一,计时到了一定时间,人为的把OPENMV传回来的黑点值修改为定值,那么就可以往前飞了,但是这样掌握不好要往前飞多久才会到达小车的正上方,对于这种情况,解决办法一是去试那个时间,多试下会试出来的,二是判断坐标值的突变,也就是在往前飞的时候,OPENMV传回来的黑点的水平坐标是大致不会变的,而黑点的垂直方向的值会发生突变,一种情况是飞到小车和黑点中间丢失了黑点,这种情况是垂直坐标从最大值变成0再变为最小值。还有一种情况是飞机有点高,往前飞的时候小车也进入了摄像头视野,因为OPENMV找的是视野中面积最大的色块,那么OPENMV得到的黑点值就发生了突变,这时就可以开始取消人为给值,开始正常的定点计时到一定时间自动降落。
发挥一:这个题和基础三类似,修改一下第三阶段定点的时间就可以了。
发挥二:这个题和基础三类似,修改一下第三阶段定点的时间就可以了。
有问题的可以加Q97354734
可以提供能力之内的帮助
本人小店:
https://shop110563242.taobao.com/index.htm?spm=2013.1.w5002-16371582764.2.fo0MiW