目录
1 APM(PIX)飞控ardupilot missionplanner扩展调参、基本调参默认值
2 Copter Home
3 调参各部分的解析示意图
4 在飞行中调roll和pitch(以遥控输入第六通道调参为例)
https://ardupilot.org/copter/index.htmlP ID到底是个什么东西?
P是比例,i是积分,d是微分。
Pid控制在工程上有广泛的应用。不需要精确的数学模型,尤其是用于复杂的非线性系统。通过调整三个参数实现稳定的控制。
比例是p。比例据说决定着响应的速度,反应的速度。在操作时的稳定性一些动态指标。这个过高的响应快对于追求速度和灵敏性的飞机或许是好事。但是对于追求精确度,稳定性的飞机未必是好事。因为很难通过一个参数来确定你所需要的位置。所以说可能会需要你反复的在修正。就好比你站在翘翘板上。偏左了,你抓紧往右跑。偏右了,你抓紧往左跑。颤颤微微很难保持一个稳定的姿势。最后导致不停的颤。如果要用丝滑的操作还得用到后边的。
积分是I,积分影响稳态精度,据说类似于一个阻尼器。用来消除系统的误差。积分会带来相位滞后。积分值如果过大,同样会引起系统的不稳定。还比如你站在翘翘板上。此时你不管向左或者向右。板子上涂了胶会影响你的速度。你的动作不再那么迅捷。但是,也趋于稳定。这个值太大了也不行,会让你行动迟钝。
微分是d。他影响偏差变化率,据说它的原理是提前加入误差的修正功能。消除过大的误差,从而优化积分对系统响应速度阻滞,但是他的数值太大了,也会造成误差的误差。进一步破坏系统的稳定性。
通通这些在mission planner都是有限制的。也就是说你不可能无限制的调整微分积分比例。有的是相互引用的关系。一个确定了,下一个可能只能调小而无法克服上限。这些都是在计算后所进行的系统的限定。总体是会趋向与保证系统的稳定性。
也正因为pId调参如此的个性化,很难找到一个完美的参数。只能自己去试了。但还是有一些规律性的东西和限制性的因素可以供我们参考。
说个笑话吧。比例,积分,微分好比是孩子要相互打架。别人骂了你一句相当于遥控来的指令。你要打他,这时候就是控制好比例(力)P,你打不能太重,也不能太轻,不能把人打死,也不能形不成威慑。如果你打过了,被打的这个人就开始积分(愤)I。他要还手了。当然了,他也不能过重或过轻。如果正好大家觉得平了,这事儿或许就了了。这个时候班长来了,班长权威是个(威)微分D,班长希望你们消除误会,或者他觉得你们还不平衡干脆互打一巴掌这事儿扯平了。当然啦,他如果煽风点火,也可以引起你们的再次殴打。这个稳定性看他会不会调停。
1 APM(PIX)飞控ardupilot missionplanner扩展调参、基本调参默认值
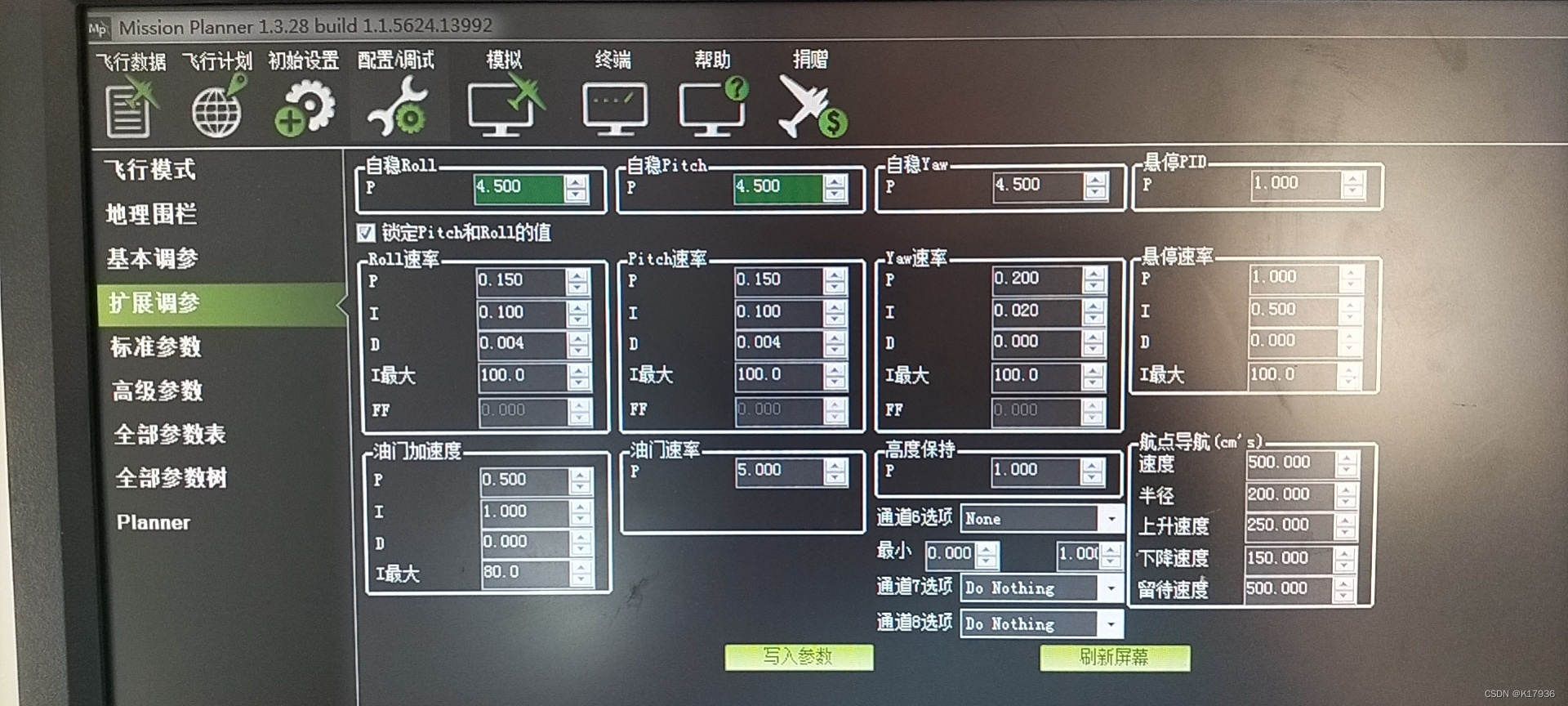
自动翻译如图。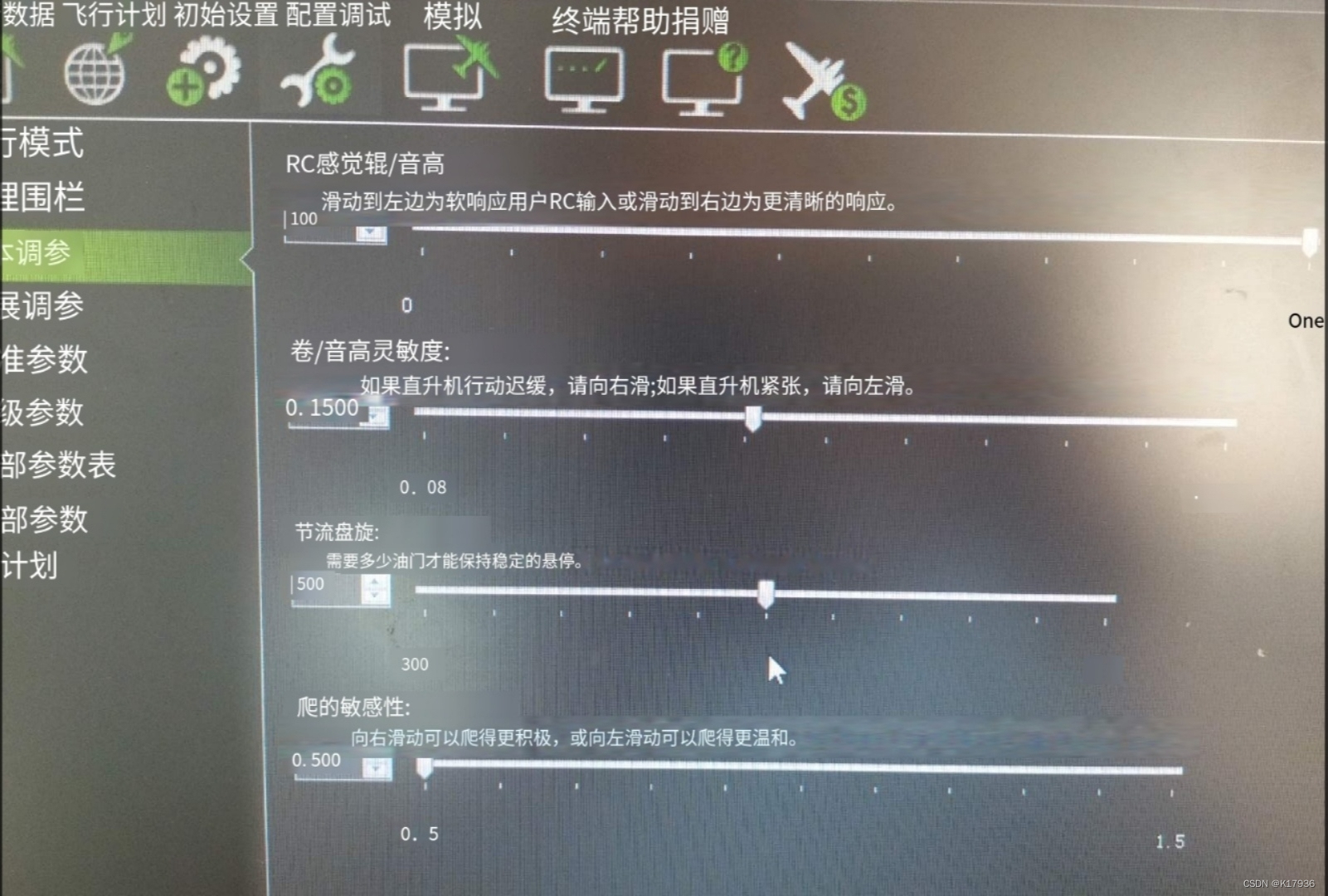 部分参数含义
部分参数含义 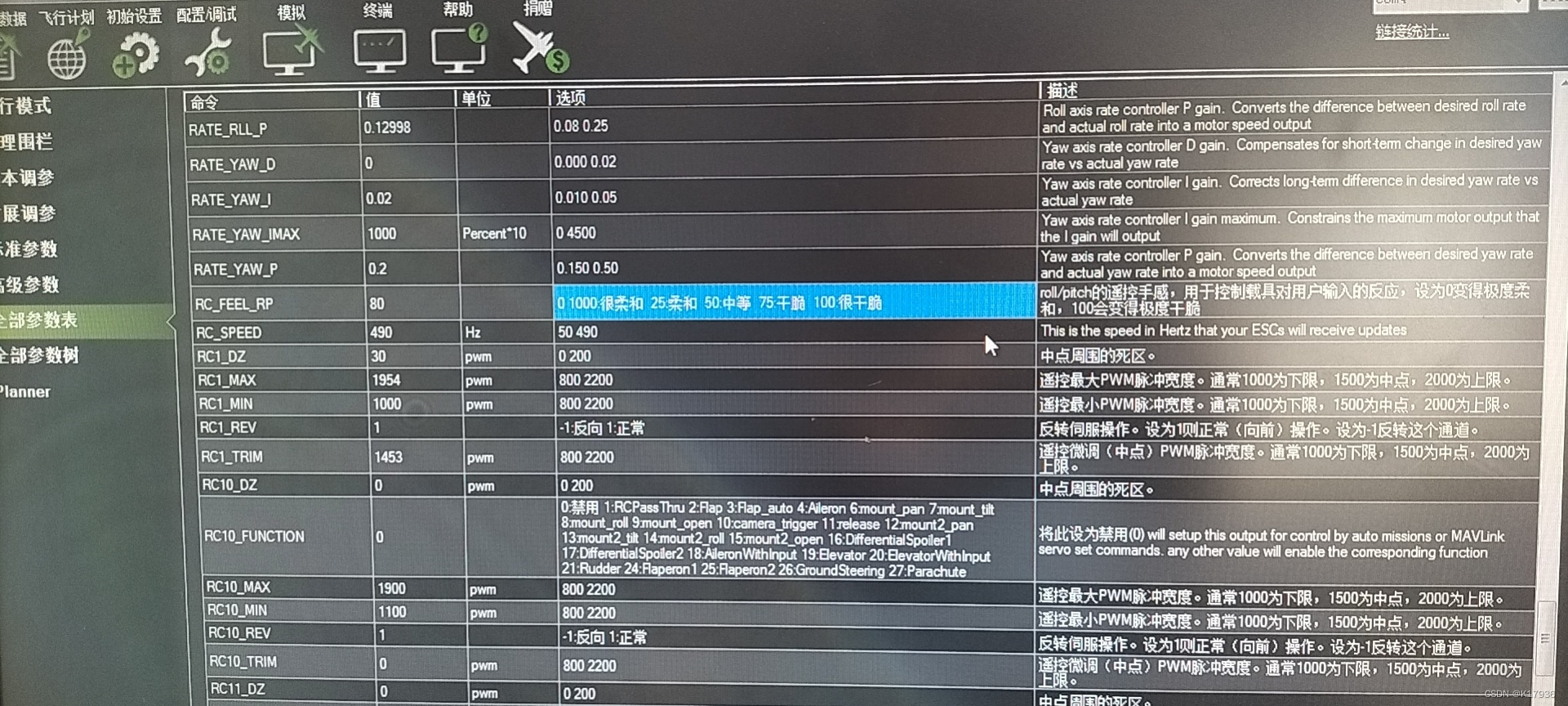
雷迅创新 © www.cuav.net与ardupilot具有合作关系,在ardupilot官方网站https://ardupilot.org/copter/index.html
tips链接中,也可以连接至该网站。
2 Copter Home
ArduPilot
Success with ArduPilot requires that the 'First Time Setup' and 'First Flight/Drive and Tuning' sections of this documentation be read and followed!
Tip
Keep up with the latest ArduPilot related blogs on ArduPilot.org!
| This is the full-featured, open-source multicopter UAV controller that won the Sparkfun 2013 and 2014 Autonomous Vehicle Competition (dominating with the top five spots). A team of developers from around the globe are constantly improving and refining the performance and capabilities of ArduCopter. | Copter is capable of the full range of flight requirements from fast paced FPV racing to smooth aerial photography, and fully autonomous complex missions which can be programmed through a number of compatible software ground stations. The entire package is designed to be safe, feature rich, open-ended for custom applications, and is increasingly easy to use even for the novice. |
System components
- A Pixhawk or other autopilot loaded with the latest version of the Copter firmware.
- Mission Planner software – gives you an easy point-and-click setup/configuration, and a full-featured ground control interface.
- This Copter Wiki provides all the information you need to set up and operate a multicopter or traditional helicopter.
- A suitable MultiCopter or Helicopter for your mission.
- Plus many other useful options: e.g. data radios, which allow two-way wireless telemetry and control between the vehicle and your computer.
Rotor Craft types
Multicopters:
- Utilize differential thrust management of independent motor-prop units to provide lift and directional control
- Benefit from mechanical simplicity and design flexibility
- A capable payload lifter that’s functional in strong wind conditions
- Redundant lift sources can give increased margin of safety
- Varied form factor allows convenient options for payload mounting.
Helicopters:
- Typically use a single lifting rotor with two or more blades
- Maintain directional control by varying blade pitch via servo-actuated mechanical linkage (many versions of these craft exist and it is beyond the scope of this manual to cover them all – the mechanical systems used in helicopters warrant special study and consideration)
- Strong, fast and efficient – a proven-worker suitable to many missions.
Because of its open design, Copter also supports more unusual frame types including the Single and Coax-Copters. Put this together with Plane, Rover and Antenna Tracker and you have a system of robotic vehicles that can be controlled through very similar interfaces to accomplish a wide variety of tasks.
Getting more info
- Continue to the Introduction section of this wiki.
- Use the ArduPilot Discuss Server Forums to ask support questions and advice.
- To get involved with the development of the software platform, visit the ArduPilot development guide.
Tip
For a simplified chinese 简体中文 version abstract of this wiki please check ArduPilot.org partner CUAV!
以下内容引自 雷迅创新 © www.cuav.net 有着清晰的图像表述。
3 调参各部分的解析示意图
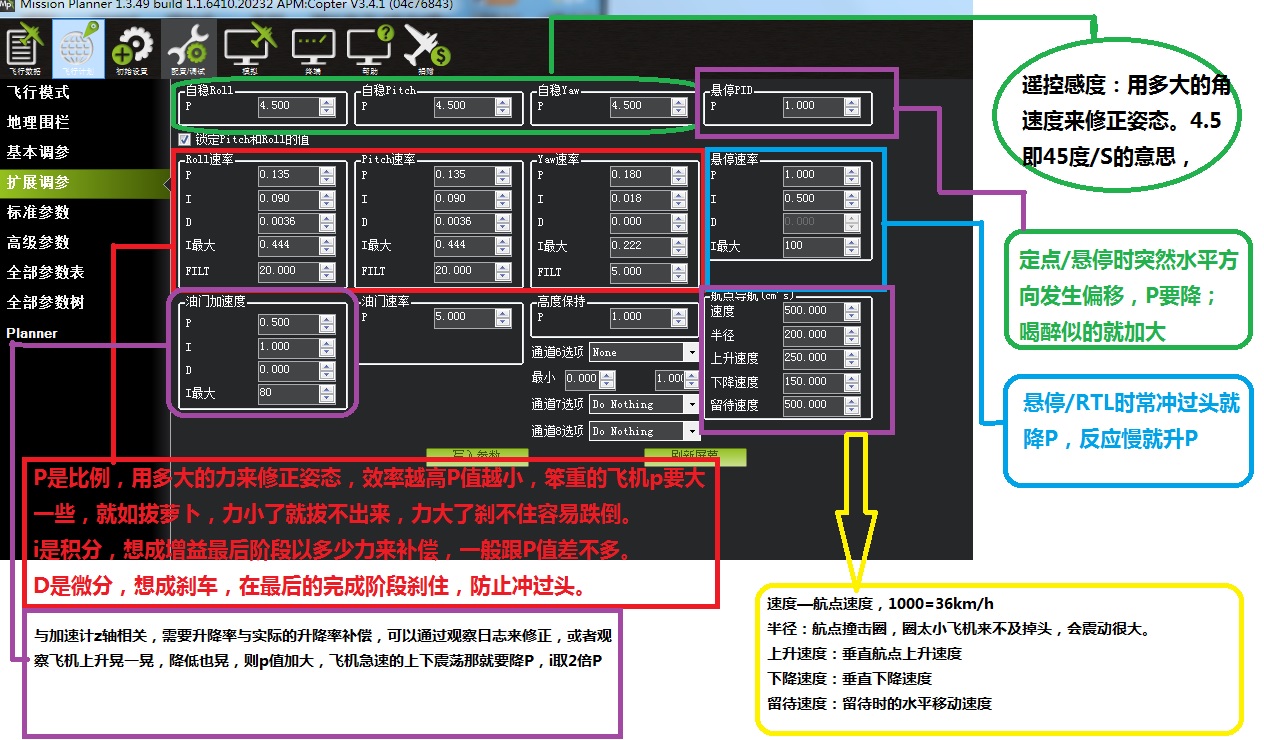
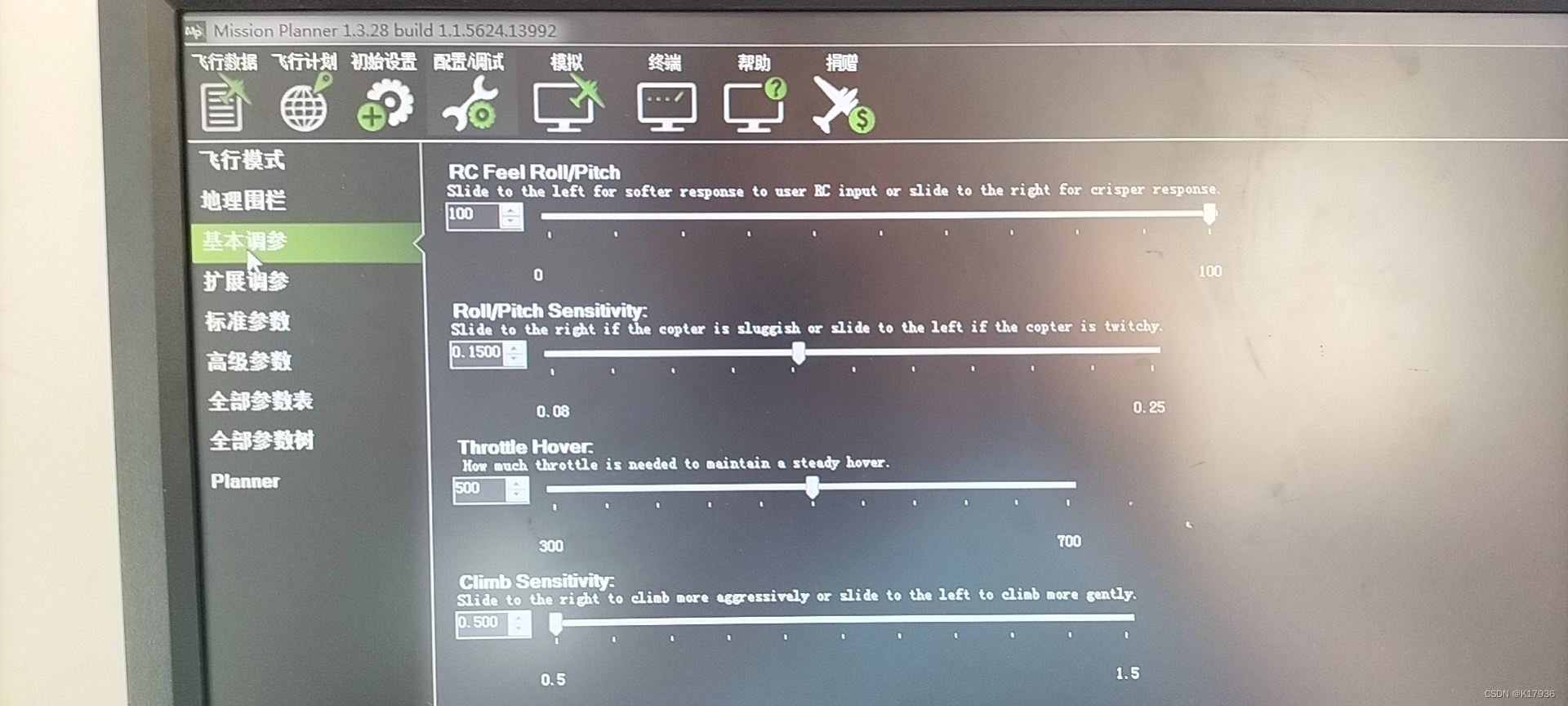
遥控感度:飞手使用遥控器操纵时飞行器的响应速度,值越大响应也越快,大的值适合穿越,小的值适合航拍,理论上效率越高的飞行器值越小,pid首先调整该参数。
4 在飞行中调roll和pitch(以遥控输入第六通道调参为例)
首先需要在遥控器校准的时候把第六通道校准,然后设置第六通道为Rate Roll / Pitch kP,设最小值为0.08,最大值为0.20(一般飞机在该范围),点击写入。
将遥控器的ch6旋钮扭转到最小的位置,按刷新参数按钮,确保速率roll p和速率pitch P变为0.08(或非常接近)
将遥控器ch6旋钮扭转到最大位置,按刷新参数,确保roll移动到0.20

在自稳模式下飞行,并转动旋钮直至飞机飞行稳定而不是抖动。
去掉飞行器电池,使用usb连接地面站,确保ch6旋钮处于飞行性能最佳的时候的位置,切换到扩展调参界面记录好pid值,重新输入您看到的值并小幅修改,写将ch6修改为none,点击写入。







![[教程]Web自动化测试怎么做?Web网页测试全流程解析](https://img-blog.csdnimg.cn/6fd5ccea42c24394816d11948a0e191b.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA5rWL6K-V54y_5aSn6K--5aCC,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)


![[方向]国外作者笔下的中国创业指南](http://articles.csdn.net/uploads/allimg/120818/89_120818210237_1.jpg)


