目录
1.加速度计校准。
2.指南针校准。
3.遥控器校准。
安装完固件后,无人机并不能马上解锁起飞,必须进行校准加速度计、指南针、遥控器,下面就逐一进行校准,该环境使用的是APM2.8、Mission Planner1.3.70地面站软件。
1.加速度计校准。
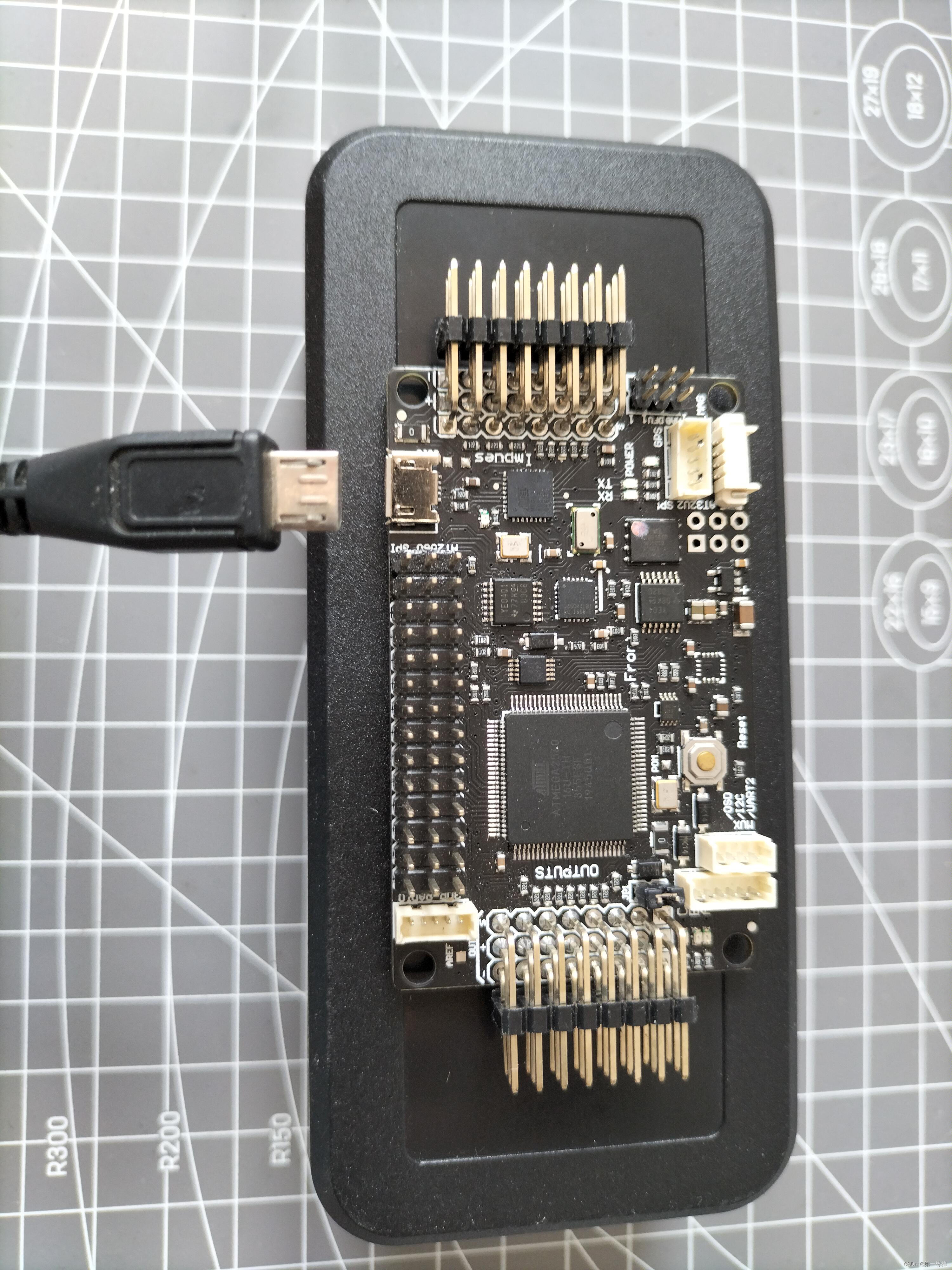
校准前应准备水平的地面或桌面,平整的方形硬壳盒子作为姿态参考。将飞控主板固定在盒子上中央位置。通过数据线连接飞控和电脑,打开Mission Planner,点击连接。

步骤:
1.选择初始设置——安装固件——必要硬件——加速度计校准。
2.按提示操作。
然后按照地面站提示,放置飞控水平,左,右,下,上以及背面LEVEL,放平LEFT,飞控向左RIGHT,飞控向右DOWN,飞控箭头向下UP,飞控箭头向上BACK,背面朝上


level
首先按飞控放平,箭头对向电脑屏幕,当点击校准加速度按钮时,飞控RGB灯会红蓝闪,保持飞控静止,等红蓝闪过后就会提示开始校准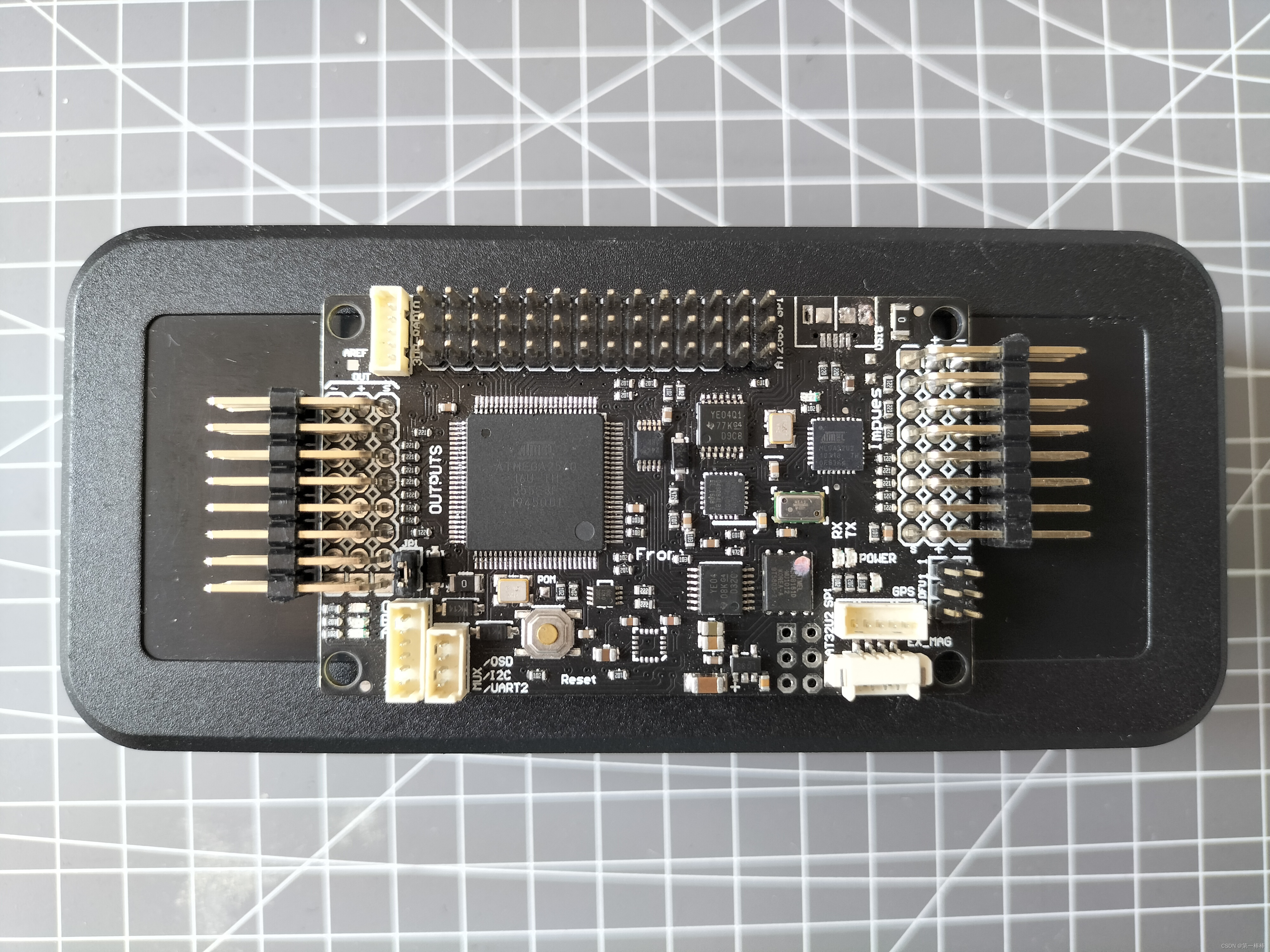



提示:
每个方位的停留时间为一秒左右,不可以过久也不能太快,在移动过程中应注意保持箭头朝向电脑为基准方位。
成功后提示sucessful,失败会提示failed,需要再次进行校准。
1.这里校准完加速度成功后必须断电重新连接。
2.第二步是做水平校准,做水平校准是必须的,而且是必须在上一步完成后断电基础上完成的。
3.如果不校准水平,可能后期飞行中出现不水平。关键操作:
1.这里校准完加速度成功后必须断电重新连接。
2.第二步是做水平校准,做水平校准是必须的,而且是必须在上一步完成后断电基础上完成的。
3.如果不校准水平,可能后期飞行中出现不水平。
2.指南针校准。

提示:
1.使用外置罗盘比内置罗盘更加抗干扰。
2.低版本的固件可能无法识别部分外置罗盘。
3.指南针校准成功后一定要飞控断电重现链接。
步骤:
1.选择初始设置——安装固件——必要硬件——指南针校准,勾选具体的GPS类型和安装位置。
2.在onboard mag calibration 点击开始或start。
3.按照提示旋转无人机每一侧面。
4.等待校准完成。
5.*出现重启飞控,再次返回指南针校准查看偏移。(*根据不同版本有所区别)
6.校准完成,重新插拔,重现链接飞控。
关键操作:
1.校准完后必须断电飞控,重新连接。
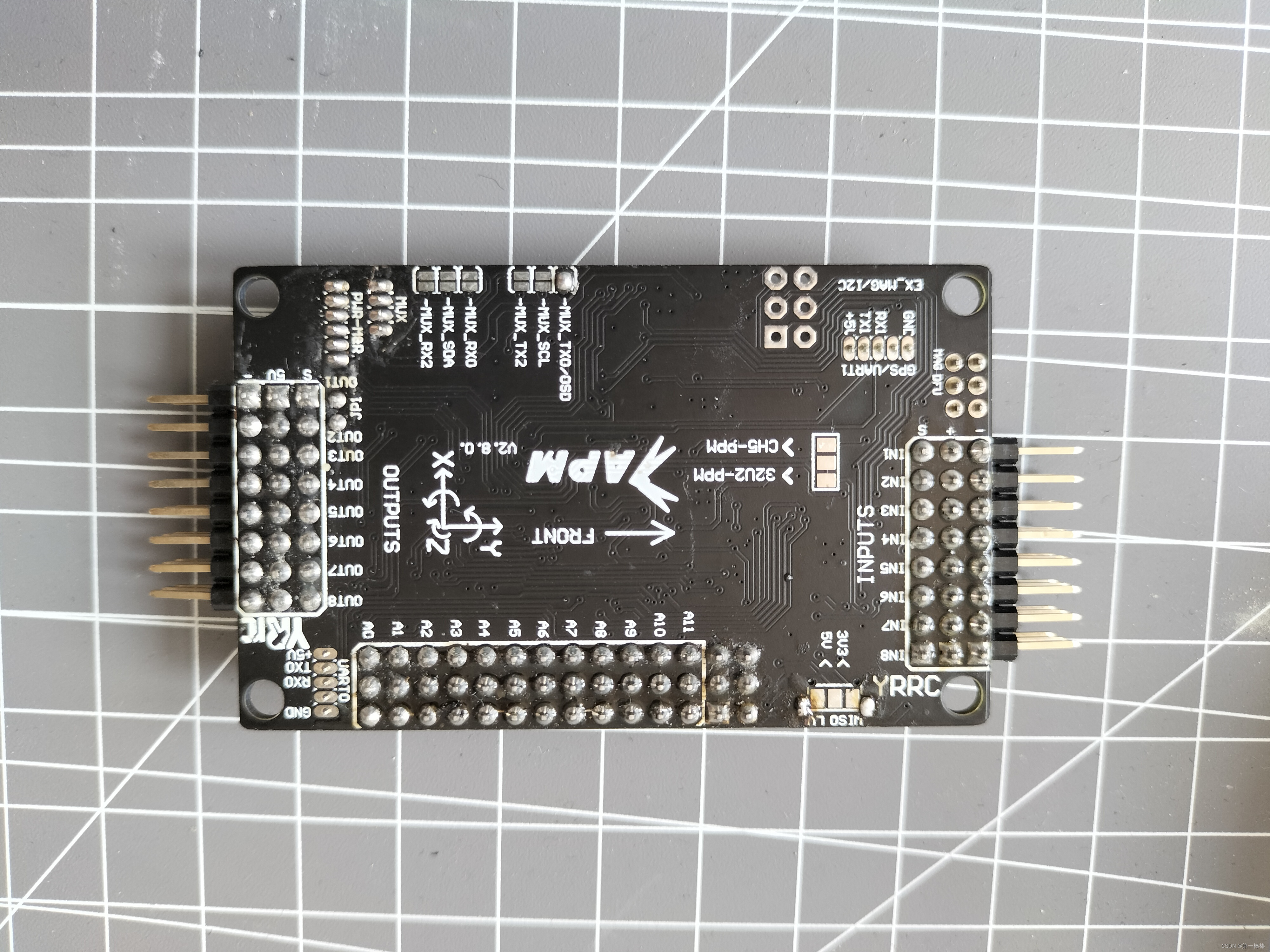
2.如果使用外置罗盘,需要禁用内置罗盘,V2.5.2版本APM禁用内置罗盘的方法是断开罗盘芯片边上的一个预设焊盘焊点,V2.8.0版本的APM只需要拔掉板上标记为MAG的跳线帽即可
3.在校准过程中,需要判断并设置芯片位置。外置罗盘是芯片字符向下安装的,则需要Rotation下拉框中选择Rotation_Roll_180,意思就是罗盘芯片横滚了180度安装,机头方向不变。如果自定义外置罗盘的机头指向,例如选择Rotation_Yaw_90(机头偏转90度),Rotation_Pitch_180(俯仰翻转180度安装)(机头机尾调换)等等。
下图为部分报错。

如果报错,可分析查看飞行数据消息和相关日志。
2022/7/9 17:04:50 : PreArm: 3D Accel calibration needed
2022/7/9 17:04:50 : PreArm: Check firmware or FRAME_CLASS
2022/7/9 17:04:20 : PreArm: 3D Accel calibration needed
2022/7/9 17:04:20 : PreArm: Check firmware or FRAME_CLASS
2022/7/9 17:03:50 : PreArm: 3D Accel calibration needed
2022/7/9 17:03:50 : PreArm: Check firmware or FRAME_CLASS
2022/7/9 17:03:20 : PreArm: 3D Accel calibration needed
2022/7/9 17:03:20 : PreArm: Check firmware or FRAME_CLASS
2022/7/9 17:03:14 : EKF3 IMU1 is using GPS
2022/7/9 17:03:14 : EKF3 IMU0 is using GPS
2022/7/9 17:02:51 : EKF3 IMU0 origin set
2022/7/9 17:02:51 : EKF3 IMU1 origin set
2022/7/9 17:02:50 : PreArm: 3D Accel calibration needed
2022/7/9 17:02:50 : PreArm: Check firmware or FRAME_CLASS
2022/7/9 17:02:41 : GPS 1: detected as u-blox at 230400 baud
2022/7/9 17:02:39 : EKF3 IMU1 MAG0 initial yaw alignment complete
2022/7/9 17:02:39 : EKF3 IMU0 MAG0 initial yaw alignment complete
2022/7/9 17:02:38 : EKF3 IMU1 tilt alignment complete
2022/7/9 17:02:38 : EKF3 IMU0 tilt alignment complete
2022/7/9 17:02:38 : Frame: UNSUPPORTED
2022/7/9 17:02:38 : DESKTOP-V1FI066
2022/7/9 17:02:38 : ArduCopter V4.2.0-dev (6ceee23b)
2022/7/9 17:02:38 : Frame: UNSUPPORTED
2022/7/9 17:02:38 : DESKTOP-V1FI066
2022/7/9 17:02:38 : ArduCopter V4.2.0-dev (6ceee23b)
2022/7/9 17:02:38 : Frame: UNSUPPORTED
2022/7/9 17:02:38 : DESKTOP-V1FI066
2022/7/9 17:02:38 : ArduCopter V4.2.0-dev (6ceee23b)
2022/7/9 17:02:37 : AHRS: EKF3 active
2022/7/9 17:02:37 : EKF3 IMU1 initialised
2022/7/9 17:02:37 : EKF3 IMU0 initialised
2022/7/9 17:02:35 : AHRS: DCM active
2022/7/9 17:02:35 : ArduPilot ReadySetting SIM_SPEEDUP=1.000000
Suggested EK3_BCOEF_* = 16.288, EK3_MCOEF = 0.209
Home: 38.891876 117.115373 alt=1.240000m hdg=0.000000
Starting sketch 'ArduCopter'
Starting SITL input
Using Irlock at port : 9005
bind port 5760 for 0
Serial port 0 on TCP port 5760
Loaded defaults from C:\Users\***\AppData\Local\Temp\tmpFC3.tmp
bind port 5762 for 2
Serial port 2 on TCP port 5762
bind port 5763 for 3
Serial port 3 on TCP port 5763
MKFIFO failed with No such file or directory
MKFIFO failed with No such file or directory
Smoothing reset at 0.001
validate_structures:469: Validating structures
Loaded defaults from C:\Users\***\AppData\Local\Temp\tmpFC3.tmp
New connection on serial port 0
MKFIFO failed with No such file or directory
MKFIFO failed with No such file or directory
MKFIFO failed with No such file or directory
MKFIFO failed with No such file or directory
MKFIFO failed with No such file or directory
MKFIFO failed with No such file or directory
Setting SIM_SPEEDUP=1.000000
Suggested EK3_BCOEF_* = 16.288, EK3_MCOEF = 0.209
Home: 38.891876 117.115373 alt=1.240000m hdg=0.000000
Starting sketch 'ArduCopter'
Starting SITL input
Using Irlock at port : 9005
bind port 5760 for 0
Serial port 0 on TCP port 5760
Loaded defaults from C:\Users\***\AppData\Local\Temp\tmpFC3.tmp
bind port 5762 for 2
Serial port 2 on TCP port 5762
bind port 5763 for 3
Serial port 3 on TCP port 5763
MKFIFO failed with No such file or directory
MKFIFO failed with No such file or directory
Smoothing reset at 0.001
validate_structures:469: Validating structures
Loaded defaults from C:\Users\***\AppData\Local\Temp\tmpFC3.tmp
MKFIFO failed with No such file or directory
MKFIFO failed with No such file or directory
MKFIFO failed with No such file or directory
MKFIFO failed with No such file or directory
MKFIFO failed with No such file or directory
MKFIFO failed with No such file or directory3.遥控器校准。

提示:
1.校准遥控器前要确保不需要连接动力电池,如果已经安装电机必须拆卸螺旋桨。
2.校准条如果和遥控器操纵杆方向不一致,可以设置遥控器本身的反转reverse。
步骤:
1.选择初始设置——安装固件——必要硬件——遥控器校准。
2.点击校准,移动遥控器操纵杆到各个方位且是最大极限位置。
3.显示绿色校准条上的红线,显示最大值和最小值。
4.点击完成。
5.将操纵杆居中,油门杆最低,点击确定。
6.出现校准数据,通常在999-2000之间。
关键操作:
信道2(ch2)俯仰(pitch)的绿色校准条同操作遥控器操纵杆方向正好相反。即操纵杆向上,校准条向下。这是唯一的且是正确的相反(其他则是和校准条运动轨迹完全一致)。pitch信道该状态时不可以改正,如果改成动作映射一致,反而是调错了。
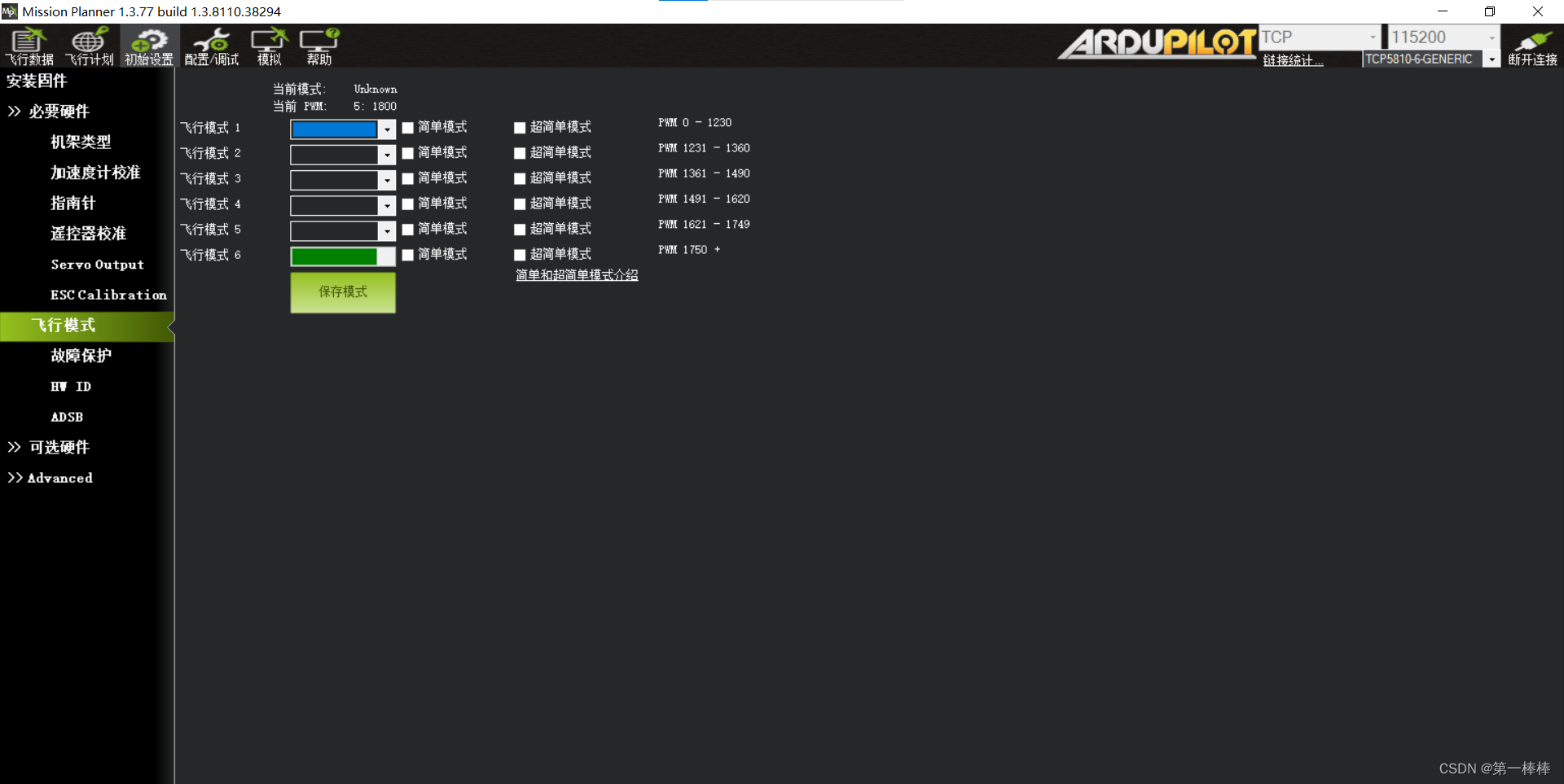
4.设置飞行模式
提示:
飞行模式的设置是重要且关键的前期调试工作之一,也关系到新组装无人机能否解锁,需要根据需要正确的设置飞行模式。如果组装无人机错误设置且无人机未进行系留,存在无人机飞出控制区造成地面危险或丢失的风险。
步骤:
1.通过数据线连接地面站和飞控。
2.选择初始设置——必要硬件——飞行模式。
3.切换遥控器飞行模式开关,通常为通道5,此时绿色高光移动至飞行模式1-6,通过下拉箭头,可以选择不同模式。
4.一般三档开关可设置三种不同的飞行模式,初学者可设置为自稳模式、定高模式、定点模式等。配合其他档位,可以设置六种模式。(可以参见Mission Planner初学者安装调试教程指南(APM或PIX飞控)6——富斯i6通过mission planner设置飞行模式(结合二挡三挡开关设置六种飞行模式)及主要飞行模式简介)https://blog.csdn.net/m0_72607891/article/details/125802043
关键操作:
1.部分模式需要GPS支持,在组装性能不确定的情况下试飞,应该对无人机进行系留或在室内或拦截网内限制,否则有失控危险并导致更加严重的后果。
2.解锁只能在既定的模式下进行,APM一般只有处于Stabilize,Acro,AltHold,Loiter这几种模式时才能解锁,如果不能解锁,请检查飞行模式是否正确,一般情况下从Stabilize模式解锁。
3.无人机起飞后可以进行飞行模式的切换,但是切换可能导致突然的立轴方向的升降或水平面的漂移,必须预有准备,尤其是在GPS信号情况不明的地方或室内,无限制手段下的无人机切换飞行模式必须慎重操作。要随时判断情况并可以迅速调整到自稳模式,关键时刻要夺回控制权,通过手动操作再次控制无人机至稳定状态。










![[教程]Web自动化测试怎么做?Web网页测试全流程解析](https://img-blog.csdnimg.cn/6fd5ccea42c24394816d11948a0e191b.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA5rWL6K-V54y_5aSn6K--5aCC,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)


![[方向]国外作者笔下的中国创业指南](http://articles.csdn.net/uploads/allimg/120818/89_120818210237_1.jpg)

