Ubuntu16.04重装系统
- 安装显卡驱动
- 第一步 禁用nouveau
- 第二步 下载驱动
- 第三步 进入命令行模式,关闭lightdm
- 第四步 安装显卡驱动
- 第五步 查看Nivida
- 设置更新与源地址
- 步骤
- 安装gnome桌面
- 安装搜狗输入法
- 安装谷歌浏览器
- 安装Anaconda3
- 安装Pycharm
- 安装keras
- 下载Cuda
- 安装cuDNN
安装显卡驱动
第一步 禁用nouveau
ubuntu 16.04默认安装第三方开源的驱动程序nouveau,所以应该首先禁用nouveau。
1.编辑blacklist.conf
sudo vim /etc/modprobe.d/blacklist.conf
注:若未安装vim则sudo apt-get install vim安装或使用vi
2.在文件最后部分插入以下两行内容
blacklist nouveau
options nouveau modeset=0
3.更新系统
sudo update-initramfs -u
4.重启系统
sudo reboot
5.验证nouveau是否已禁用
lsmod | grep nouveau
注:无显示则已禁用
第二步 下载驱动
在Nvidia官网下载合适的驱动程序,点这里。
记住显卡驱动文件所存放的位置,可以将其放在HOME目录下,如果是系统语言为中文的ubuntu系统,要新建一个英文的文件夹,否则在命令行模式下将找不到。
第三步 进入命令行模式,关闭lightdm
1.在ubuntu下按ctrl+alt+f1进入命令行界面。
2.输入:sudo service lightdm stop //这个是关闭图形界面,不执行会出错。
3.卸载掉原有驱动:sudo apt-get remove nvidia-* //若安装过其他版本或其他方式安装过驱动执行此项
第四步 安装显卡驱动
假设我的驱动文件是NVIDIA-Linux-x86_64-440.36.run
1.给驱动run文件赋予执行权限:sudo chmod a+x NVIDIA-Linux-x86_64-440.36.run
2.安装:sudo ./NVIDIA-Linux-x86_64-440.36.run -no-x-check -no-nouveau-check -no-opengl-files //只有禁用opengl这样安装才不会出现循环登陆的问题-no-x-check:安装驱动时关闭X服务-no-nouveau-check:安装驱动时禁用nouveau-no-opengl-files:只安装驱动文件,不安装OpenGL文件
3.安装过程中的选项:1.The distribution-provided pre-install script failed! Are you sure you want to continue? 选择 yes 继续。2.Would you like to register the kernel module souces with DKMS? This will allow DKMS to automatically build a new module, if you install a different kernel later? 选择 No 继续。3.问题没记住。选项是:install without signing4.问题大概是:Nvidia's 32-bit compatibility libraries? 选择 No 继续。5.Would you like to run the nvidia-xconfigutility to automatically update your x configuration so that the NVIDIA x driver will be used when you restart x? Any pre-existing x confile will be backed up. 选择 Yes 继续。
第五步 查看Nivida
1.挂载Nvidia驱动:modprobe nvidia
2.检查驱动是否安装成功:nvidia-smi
注:出现显卡信息为安装成功。
3.重启sudo reboot
注:sudo ./NVIDIA-Linux-x86_64-440.36.run --uninstall 卸载显卡
设置更新与源地址
步骤
打开系统设置:




安装gnome桌面
1.打开终端,输入安装gnome的命令。sudo apt-get install gnome-panel
2.需要注销帐号再次登录。
注:小技巧,按住alt+win+右键可以删除顶上的小图标
安装搜狗输入法
点这里。
如果出现安装错误,执行:sudo apt-get install -f //解决依赖问题
安装谷歌浏览器
点这里。
安装Anaconda3
点这里。
1.修改~/.bashrc2.添加export PATH=/home/lishanliao/anaconda3/bin:$PATH3.source ~/.bashrc
安装Pycharm
点这里。
安装pycharm没有启动图标看这里。
安装keras
attention version unable.
$ sudo apt-get update
$ sudo apt-get upgrade
$ sudo apt-get install python-pip python-dev
更换pip源。
默认情况下,Ubuntu 在安装 Python 包时使用 Python 2(比如 python-pip)。如果你想
使用 Python 3,那么应该使用 python3 前缀代替 python。例如:
$ sudo apt-get install python3-pip python3-dev
使用 pip 安装包时要记住,它默认安装的是 Python 2 的包。想要安装 Python 3 的包,
你应该使用 pip3。
$ sudo pip install tensorflow-gpu
要修改pip源,可以自己创建文件,在pycharm中,执行pip命令。
用pip list 查看版本
(1) 安装 BLAS 库(这里安装的是 OpenBLAS),确保你可以在 CPU 上运行快速的张量运算。
$ sudo apt-get install build-essential cmake git unzip pkg-config libopenblas-dev liblapack-dev
(2) 安装 Python 科学套件:Numpy、SciPy 和 Matplotlib。无论是否做深度学习,如果想要
使用 Python 进行任意类型的机器学习或科学计算,这一步都是必需的。
$ sudo apt-get install python-numpy python-scipy python-matplotlib python-yaml
(3) 安装 HDF5。这个库最初由 NASA(美国国家航空航天局)开发,用高效的二进制格式
来保存数值数据的大文件。它可以让你将 Keras 模型快速高效地保存到磁盘。
$ sudo apt-get install libhdf5-serial-dev python-h5py
(4) 安装 Graphviz 和 pydot-ng,这两个包可以将 Keras 模型可视化。它们对运行 Keras 并不
是必需的,所以你可以跳过这一步,在需要时再来安装这些包。安装命令如下。
$ sudo apt-get install graphviz
$ sudo pip install pydot-ng
(5) 安装某些代码示例中用到的其他包。
$ sudo apt-get install python-opencv
下载Cuda
点击这里先查看版本间的对应关系再下载。
点击这里选择对应的版本下载。
我是直接下载xxx.run版本进行安装,需要注意的是,如果之前有安装显卡,那么安装cuda的时候要注意不要选中显卡驱动。
安装完毕后还需要进行环境的配置,在终端会给予提示,分别填入以下:
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/cuda-10.2/lib64
export PATH=$PATH:/usr/local/cuda-10.2/bin
export CUDA_HOME=$CUDA_HOME:/usr/local/cuda-10.2
填好内容后,将其加在主目录下的 .bashrc文件里面。
再执行:
source .bashrc
然后在终端输入:
nvcc --version
如果显示如下图:

表示安装成功。
cat /usr/local/cuda/version.txt 查看当前版本
安装cuDNN
点这里,要先进行注册,然后选择对应的版本下载。
要选择下载cuDNN Library for Linux这一栏的内容。
下载后用 tar -xzvf解压压缩包。
安装过程实际上是把cudnn的头文件复制到CUDA的头文件目录里面去;把cuDNN的库复制到CUDA的库目录里面去。
首先需要将下载的cudnn解压,之后再执行如下命令:(大家也可以一个一个的移动到相应的cuda文件下)
# 复制cudnn头文件
sudo cp cuda/include/* /usr/local/cuda-对应版本/include/
# 复制cudnn的库
sudo cp cuda/lib64/* /usr/local/cuda-对应版本/lib64/
# 添加可执行权限
sudo chmod +x /usr/local/cuda-9.0/include/cudnn.h
sudo chmod +x /usr/local/cuda-9.0/lib64/libcudnn*
然后执行:
cat /usr/local/cuda/include/cudnn.h | grep CUDNN_MAJOR -A 2
出现如下图所示,即安装完成:

查看版本:
cat /usr/local/cuda/include/cudnn.h | grep CUDNN_MAJOR -A 2
卸载:
sudo rm -rf /usr/local/cuda/include/cudnn.h
sudo rm -rf /usr/local/cuda/lib64/libcudnn*
Ubuntu16.4安装CUDA9.0+CUDNN7.1
Ubuntu16.04下安装cuda和cudnn的三种方法(亲测全部有效)
如果遇到了依赖问题,比如libxxxxx.9.0.so问题,只需要添加以下步骤即可解决!
- cd /etc/ld.so.conf.d
- sudo gedit cuda.conf
- 在cuda.conf中添加路径 /usr/local/cuda/lib64
- sudo ldconfig







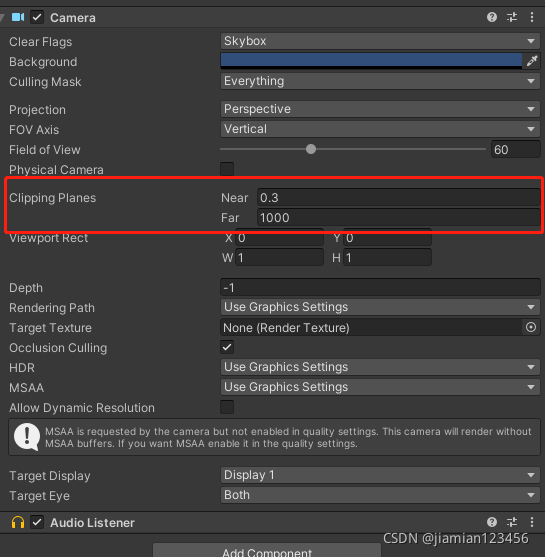
![[Unity]Screen position out of view frustum 的解决方法之一](https://img-blog.csdnimg.cn/20210719172445583.png)