一家之言,仅作分享,如有不合理或需要改进的地方,欢迎各位讨论。
前言
在自动驾驶地图定位模块的功能开发中,主要研究方向分为三种:建图、里程计、定位。SfM(Structure From Motion)即 传统三维重建,它更注重的是建图;VO(Visual Odometry)或VIO(Visual-Inertial Odometry)要解决的问题就是里程计问题,与机器人领域不同,在实际自动驾驶项目中,里程计部分是由惯导,轮速计,视觉,激光等多传感器融合完成;SLAM(Simultaneous Localization And Mapping)同时建图与定位,它更注重的是定位。
SfM,运动恢复结构
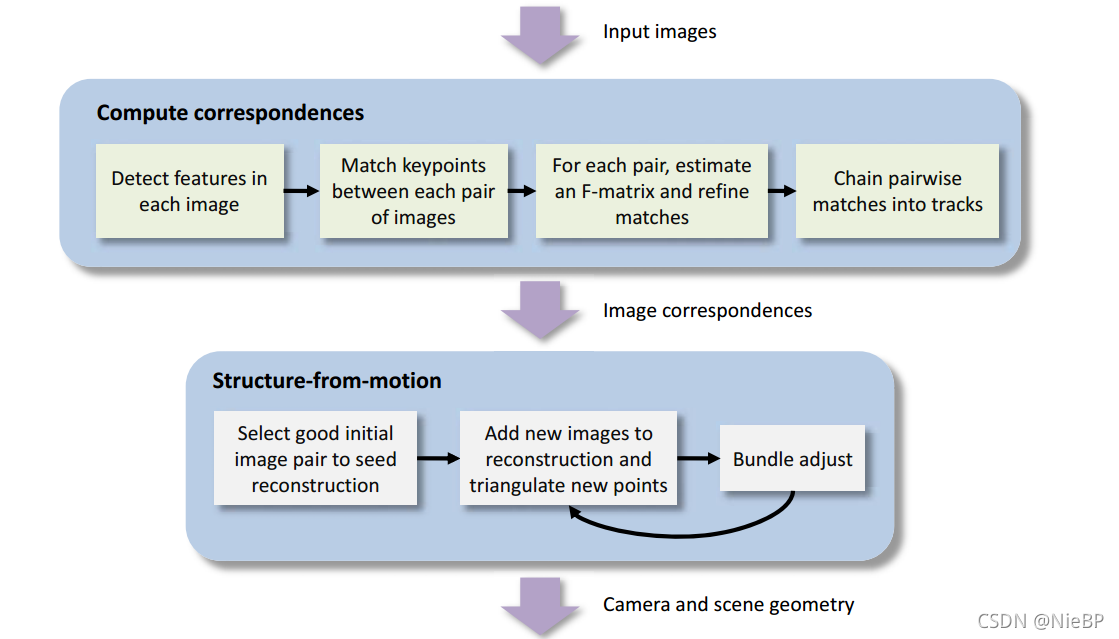
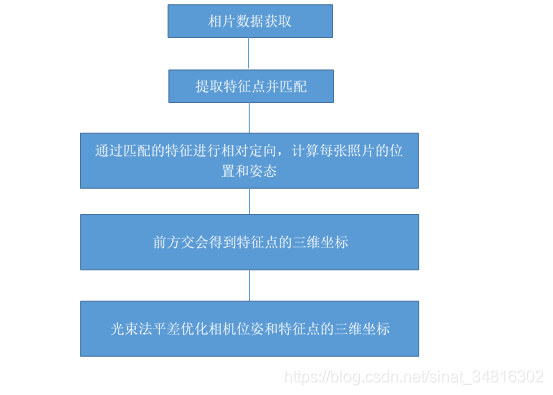
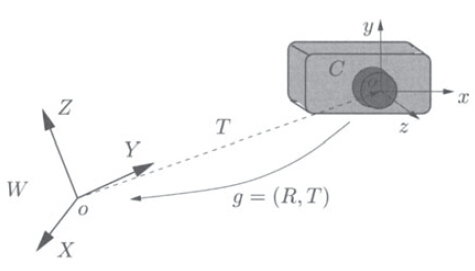
顾名思义,SfM是通过相机的运动来进行三维重建。这里,需要用到对极几何的理论知识,在我的博客视觉里程计-对极几何中,有简单的入门介绍。这里,简单讲述一下SfM的流程。
- 特征检测与匹配。在我的博客视觉SLAM–ORB特征简介中,介绍了多种特征点以及特征匹配的实例代码。
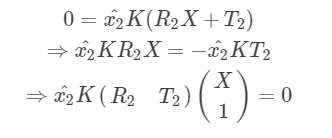
- 对每一对完成特征匹配的图像,估计基础矩阵F或本质矩阵E。
- 根据本质矩阵分解得出R,t,估计相机运动。
- 三维点云计算。得出两帧图像的相对运动后,利用三角化得出特征点的深度。
- 计算多帧图像的重投影误差。将同一特征点的三维信息坐标转换至图像坐标系下,确定该值与实际图像感知的点的距离差。
- BA优化。利用BA同时优化地标位置与相机位姿,解决非线性优化问题,可用ceres,类似方法可以参考我的博客Ceres解决实车SLAM后端优化问题
视觉里程计
视觉里程计主要有两大方法:直接法和特征点法。
特征点法:
- 当相机为单目时,我们只知道 2D 的像素坐标,因而问题是根据两组 2D 点估计运
动。该问题用对极几何来解决。 - 当相机为双目、RGB-D 时,或者我们通过某种方法得到了距离信息,那问题就是根
据两组 3D 点估计运动。该问题通常用 ICP 来解决。 - 如果我们有 3D 点和它们在相机的投影位置,也能估计相机的运动。该问题通过 PnP
求解。
在实际自动驾驶项目中,作者用到的最多的方法是ICP,在我的博客多种形式ICP问题的ceres实例应用中,提供了多种作者在实际应用中的ICP方法的C++代码。
虽然特征点法在视觉里程计中处于主流地位,但同时它也有一些不足:
- 关键点的提取与描述子的计算非常耗时。
- 使用特征点时,忽略了除特征点以外的所有信息。针对相邻帧的运动估计而言,这样做会丢失了大部分可能有用的图像信息。
- 相机有时会运动到特征缺失的地方,往往这些地方都没有什么明显的纹理信息。这里额外提一句,在实际项目中,在这样没有明显特征的地方,正如上文提到的,可以利用IMU与轮速计进行航位推算。
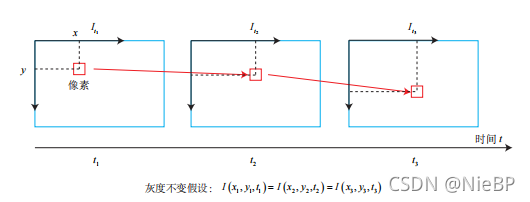
针对上述问题,直接法直接根据像素亮度信息,估计相机的运动,可以完全不用计算关键点和描述子。于是,直接法既避免了特征的计算时间,也避免了特征缺失的情况。只要场景中存在明暗变化(可以是渐变,不形成局部的图像特征),直接法就能工作。
直接法是从光流演变而来的。光流描述了像素在图像中的运动,而直接法则附带着一个相机运动模型。在直接法中,有一个重要假设,灰度不变假设,同一个空间点的像素灰度值,在各个图像中是固定不变的。而这也是直接法的关键不足的地方。
SLAM
SLAM问题的本质是对主体自身(位姿)和周围环境空间(点云)的不确定性的估计。它要求解决是同步建图与定位问题,重点是定位。
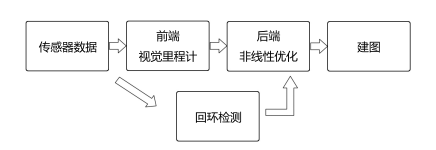
- 传感器信息读取。在视觉 SLAM 中主要为相机图像信息的读取和预处理。在自动驾驶车辆中,还有轮速计、惯性传感器等信息的读取和同步。
- 视觉里程计 (Visual Odometry, VO)。视觉里程计任务是估算相邻图像间相机的运动,以及局部地图的样子。VO 又称为前端(Front End)。
- 后端优化(Optimization)。后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。由于接在 VO 之后,又称为后端(Back End)。
- 回环检测(Loop Closing)。回环检测判断车辆是否曾经到达过先前的位置。如果检测到回环,它会把信息提供给后端进行处理。
- 建图(Mapping)。它根据估计的轨迹,建立与任务要求对应的地图。
在这里,会发现SLAM与SfM本质其实是一样的,都是有特征检测,运动估计,非线性优化误差求解位姿地标等。区别的话,主要有两点:
- SLAM是有序的图像序列,一般通过前后帧间匹配和局部窗口法,只有回环检测时需要进行图像间的匹配;基于图像的SfM不要求实时,数据是无序的,可以一次输入所有图像,利用所有信息。
- SLAM是个动态问题,会涉及到滤波,运动学相关的知识,而SfM主要涉及的还是图像处理的知识。
实际问题解决方案
作者在实际自动驾驶SLAM问题中,更推荐的方法还是基于深度学习完成图像语义特征的检测,将特征转换为三维信息后,利用ICP估计位姿变化。具体方案可以结合我之前对两篇论文的阅读心得,分别是
停车场场景【论文阅读】AVP-SLAM Semantic Visual Mapping and Localization for Autonomous Vehicles in the Parking Lot
大范围的城市场景【论文阅读】RoadMap: A Light-Weight Semantic Map for Visual Localization towards Autonomous Driving
自己利用激光雷达处理的大场景问题大范围室外环境三维激光点云SLAM建图。



![[CV] Structure from motion(SFM)- 附我的实现结果](https://img-blog.csdn.net/20170522192118102)