点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达
自古以来,人们惆怅千年要解决的问题: 定位、定向. 当然了还有我是谁?我在哪里?
在这个时候, SLAM与SFM 横空出世. 这两兄弟叱咤乾坤,成为人们解决上述问题的得力帮手.
SFM
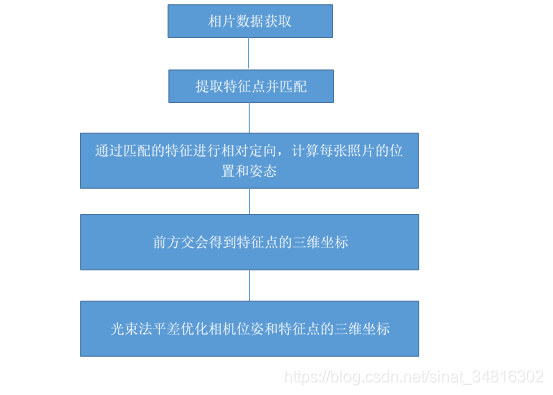
SFM即Structure From Motion.
它也称之为传统三维重建,这是一门计算机视觉学科的分支, 特点是把数据采集回来,然后离线处理.常见应用就是重建某建筑物的3D地图.
下面附上一些三维重建的效果图:
SLAM
SLAM也被称为Simultaneous Localization and Mapping,翻译过来叫同时定位与建图.
SALM是一个概念不是算法,SLAM包含多个模块,每个模块都有多种算法.每种算法很复杂的,此处还是保护好自己头发!
整个SLAM框架可以分为前端和后端.根据不同的前端需求,我们采用不同的后端策略,后端也提出了众多的算法理论,这些基本都是关于优化方面的东西,还是要好好保护头发.
附上一些SLAM效果图
区别
关于这两者区别与联系,知乎已有前辈给出了很鲜明的解释.
SFM和SLAM基本讨论的是同一问题,不过SFM是vision方向的叫法,而SLAM是robotics方向的叫法.
SLAM所谓的Mapping,SFM叫structure;SLAM所谓的Location,SFM方向叫camera pose.
但是从出发点考虑的话,SFM主要是要完成3D reconstuction,而SLAM主要是要完成localization.这样设计的优化目标就完全不同了.
从方法论的角度上考虑的话,传统的SFM是不要求prediction的,real-time是不要求的.但是对于SLAM而言prediction是必须的,因为SLAM的终极目标是要real-time navigation.
而传统的SLAM也把主要精力放在prediction上面,而且是借助非camera的外界的手段来predict(运动模型?状态方程?).例如acceleration sensor.
传统SFM则把精力放在feature tracking上面了.
直到最近,SFM开始利用图片间的optical flow做prediction,而SLAM则更加的注重了feature tracking.所以就目前而言两个领域似有大融和趋势.
SLAM要求实时,数据是线性有序的,无法一次获得所有图像,部分SLAM算法会丢失过去的部分信息;基于图像的SFM不要求实时,数据是无序的,可以一次输入所有图像,利用所有信息.
SLAM是个动态问题,会涉及到滤波,运动学相关的知识,而SFM主要涉及的还是图像处理的知识.
联系
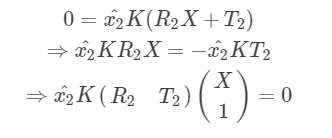
基本理论是一致的,都是多视角几何.
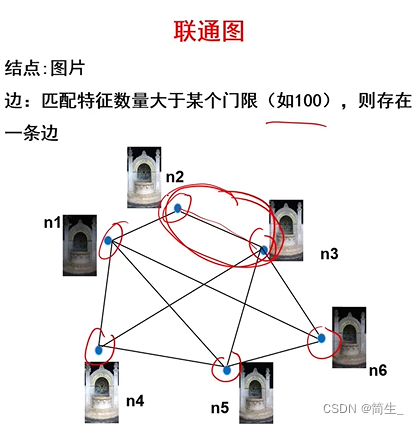
传统方法都需要做特征值提取与匹配.
都需要优化投影误差.
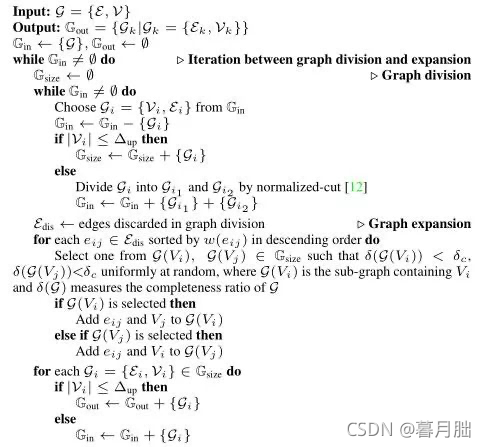
回环矫正和SfM的全局注册方法是同一件事情.
更多精彩回答可参考如下链接:
https://www.zhihu.com/question/64011093/answer/971851111?utm_source=wechat_session目前现状
从最近几年发展来看
SLAM: 以定位为主,以建图为辅;且是朝轻量级,小型化方向发展,而且最近跟深度学习结合的语义SLAM也在慢慢火热,这也跟这几年深度学习火热有关系,也许深度学习能解决一些SLAM的技术门槛吧.
三维重建: 以建图为主,以定位为辅;朝大规模,大型动态场景的重建方向发展.
本文仅做学术分享,如有侵权,请联系删文。
下载1
在「3D视觉工坊」公众号后台回复:3D视觉,即可下载 3D视觉相关资料干货,涉及相机标定、三维重建、立体视觉、SLAM、深度学习、点云后处理、多视图几何等方向。
下载2
在「3D视觉工坊」公众号后台回复:3D视觉github资源汇总,即可下载包括结构光、标定源码、缺陷检测源码、深度估计与深度补全源码、点云处理相关源码、立体匹配源码、单目、双目3D检测、基于点云的3D检测、6D姿态估计源码汇总等。
下载3
在「3D视觉工坊」公众号后台回复:相机标定,即可下载独家相机标定学习课件与视频网址;后台回复:立体匹配,即可下载独家立体匹配学习课件与视频网址。
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。
▲长按加微信群或投稿
▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的知识点汇总、入门进阶学习路线、最新paper分享、疑问解答四个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近2000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、可答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~