SfM
Structure from motion (SfM) is the process of estimating the 3-D structure of a scene from a set of 2-D images.
运动结构(SfM)是根据一组二维图像估计场景的 3-D **结构的过程。
注意Motion是指相机在移动

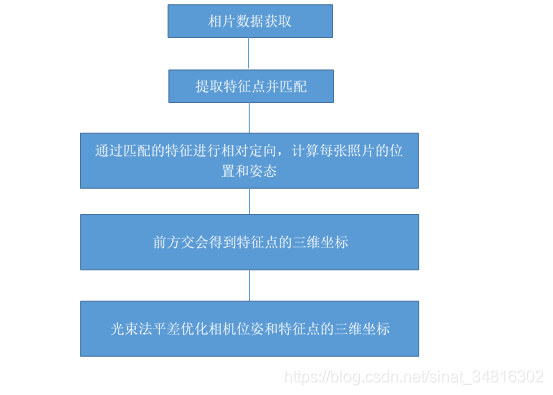
SFM通常用来建立image structure。 这意味着它估计 照片位置,方向和相机参数。
而MVS(Multi view stereo)从SFM获取的位置、方向、相机参数等信息,并制作3D密集点云。
因此,为了从一组图像中创建3D模型,我们必须先执行SFM,然后执行MVS。
PS:MVS假设内部和外部(即照相机姿势)是已知的,而SfM用于计算照相机姿势。
但是也有文献说:
in sparse modeling using Structure-from-Motion (SfM) and in dense modeling using Multi-View Stereo (MVS).
[Pixelwise View Selection for Unstructured Multi-View Stereo]
实际实践中,我们可能是two views,也可能是multi views:


事实上,要创建3D重建图像,只需从不同角度拍摄许多区域或物体具有高度重叠的图像。 该相机不需要专门化,标准的消费级相机可以很好地适用于SfM方法。
当然,我们可以知道在多张images重建3D structure的时候,我们需要完成多个图像中的匹配。 这种匹配依赖于一些独特的特征,通常是拐角或线段。跟踪这些特征,并用于生成相机位置和方向以及特征坐标的估计。
应用
一个贴近我们生活的应用就是:SfM方法被用于使用大量已有图像来创建历史建筑和其他古迹的3-D模型。


![[CV] Structure from motion(SFM)- 附我的实现结果](https://img-blog.csdn.net/20170522192118102)