t-SNE(t-distributed stochastic neighbor embedding)是用于降维的一种机器学习算法,是由 Laurens van der Maaten 和 Geoffrey Hinton在 08 年提出来。t-SNE 是一种非线性降维算法,非常适用于高维数据降维到 2 维或者 3 维,进行可视化。在实际应用中,t-SNE很少用于降维,主要用于可视化,可能的原因有以下几方面:
- 当我们发现数据需要降维时,一般是特征间存在高度的线性相关性,此时我们一般使用线性降维算法,比如PCA。即使是特征之间存在非线性相关,也不会先使用非线性降维算法降维之后再搭配一个线性的模型,而是直接使用非线性模型;
- 一般 t-SNE 都将数据降到 2 维或者 3 维进行可视化,但是数据降维降的维度一般会大一些,比如需要降到 20 维,t-SNE 算法使用自由度为 1 的 t 分布很难做到好的效果,而关于如何选择自由度的问题,目前没有研究;
- t-SNE 算法的计算复杂度很高,另外它的目标函数非凸,可能会得到局部最优解;
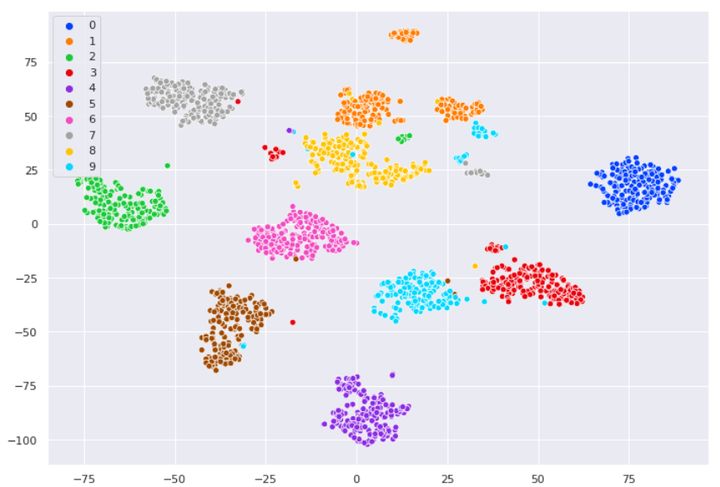
在可视化的应用中,t-SNE的效果要好于 PCA,下面是对手写数字可视化的一个结果对比,上面的图是 PCA 降维到2维的结果,下面是 t-SNE算法的结果。对可视化的效果衡量,无非是两方面:相似的数据是不是离得近,不相似的数据是不是离得远。从这两方面来讲,t-SNE的效果要明显优于 PCA。


一、SNE
1、基本思想
t-SNE算法由 SNE 改进而来,所以先来介绍 SNE。给定 n 个高维数据 x1,x2,...,xn x 1 , x 2 , . . . , x n ,若将其降维至 2 维,SNE 的基本思想是若两个数据在高维空间中是相似的,那么降维至 2 维空间时它们应该离得很近。
2、相似性计算
SNE使用条件概率来描述两个数据之间的相似性,假设 xi,xj x i , x j 是高维空间中的两个点,那么以点 xi x i 为中心构建方差为 σi σ i 的高斯分布,使用 pj|i p j | i 表示 xj x j 是 xi x i 邻域的概率,如果 xj x j 离 xi x i 很近,那么 pj|i p j | i 很大,反之, pj|i p j | i 很小, pj|i p j | i 定义如下:

我们只关心不同点对之间的相似度,所以设定 pi|i=0 p i | i = 0 。
那么在低维空间中也可以使用这样的条件概率来定义距离,假设 xi,xj x i , x j 映射到低维空间后对应 yi,yj y i , y j , yj y j 是 yi y i 邻域的条件概率为 qj|i q j | i :

低维空间中的方差直接设置为 σi=2–√/1 σ i = 2 / 1 ,方便计算,同样 qi|i=0 q i | i = 0 。
3、目标函数
在高维空间中,如果考虑 xi x i 与其他所有点之间的条件概率,那么会构成一个条件概率分布 Pi P i ,同样在地位空间也会有与之对应的条件概率分布 Qi Q i ,如果降维之后的数据分布与原始高维空间中的数据分布是一样的,那么理论上这两个条件概率分布式是一致的。那么如何衡量两个条件概率分布之间的差异呢?答案是使用 K-L 散度(也叫做相对熵),于是,目标函数为:

分析:
- 当 pj|i p j | i = 0.9,也就是 xj x j 离 xi x i 很近时,如果算法计算映射到低维空间的 pj|i p j | i = 0.1,也就是映射后 xj x j 离 xi x i 很远,那么此时目标函数会有一个很大的损失。SNE算法也因此保证了数据的局部性;
- 当 pj|i p j | i = 0.1,也就是 xj x j 离 xi x i 很远时,如果算法计算映射到低维空间的 pj|i p j | i = 0.9,也就是映射后 xj x j 离 xi x i 很近,那么此时目标函数会有一个很小的损失,实际上我们并不希望得到这样的结果,一个大的损失才是我们想要的,但由于 K- L 散度本身的不对称性,这一缺陷无法避免,后续我们看 t-SNE 算法如何对其进行改进。
4、SNE缺点
通过以上的介绍,总结一下SNE的缺点:
- 不对称导致梯度计算复杂,对目标函数计算梯度如下,由于条件概率 pj|i p j | i 不等于 pi|j p i | j , qj|i q j | i 不等于 qi|j q i | j ,因此梯度计算中需要的计算量较大。

- 拥挤问题。所谓拥挤问题,顾名思义,就是不同类别的簇挤在一起,无法区分开来,这就是拥挤问题。有的同学说,是不是因为SNE更关注局部结构,而忽略了全局结构造成的?实际上,拥挤问题的出现与某个特定算法无关,而是由于高维空间距离分布和低维空间距离分布的差异造成的。

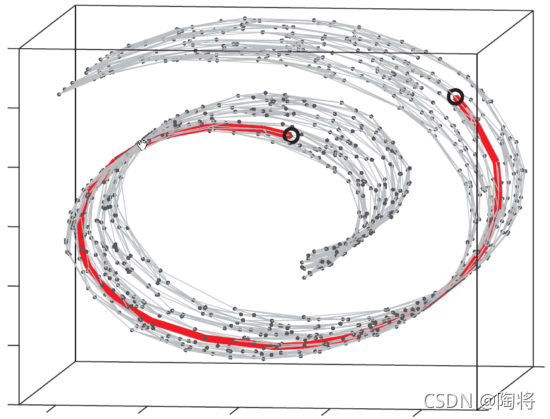
假设一个以数据点 xi x i 为中心,半径为 r 的 m 维球(二维空间就是圆,三维空间就是球),其体积是按 r 的 m 次方增长的,假设数据点是在 m 维球中均匀分布的,我们来看看其他数据点与 xi x i 的距离随维度增大而产生的变化。从图中可以看到,随着维度的增大,大部分数据点都聚集在 m 维球的表面附近,与点 xi x i 的距离分布极不均衡。如果直接将这种距离关系保留到低维,肯定会出现拥挤问题。
- 由于K - L散度本身的不对称性,使得SNE算法只关注数据局部性而忽略了数据的全局性。
针对以上 3 个缺点,在 t-SNE 中会如何改进呢?
二、t-SNE
1、对称SNE
原始 SNE 中,在高维空间中条件概率 pj|i p j | i 不等于 pi|j p i | j ,低维空间中 qj|i q j | i 不等于 qi|j q i | j ,于是提出对称 SNE,采用更加通用的联合概率分布代替原始的条件概率,使得 pij p i j = pji p j i , qij q i j = qji q j i
简单来讲,在低维空间中定义 qij q i j :

当然,在高维空间我们也可以定义 pij p i j :

但是在高维空间中这样的定义会带来异常值的问题,怎么理解呢?假设点 xi x i 是一个噪声点,那么 || xi x i - xj x j || 的平方会很大,那么对于所有的 j, pij p i j 的值都会很小,导致在低维映射下的 yi y i 对整个损失函数的影响很小,但对于异常值,我们显然需要得到一个更大的惩罚,于是对高维空间中的联合概率修正为:

这样就避免了异常值的问题,此时的梯度变为:

相比于原始 SNE,对称 SNE 的梯度更加简化,计算效率更高。但对称SNE的效果只是略微优于原始SNE的效果。
2、引入 t 分布
我们回到刚才 SNE 存在的两个缺点的第二个,拥挤问题,这个问题的解决在 t-SNE 中就是使用 t 分布。t 分布是一种长尾分布,从图中可以看到,在没有异常点时,t 分布与高斯分布的拟合结果基本一致。而在第二张图中,出现了部分异常点,由于高斯分布的尾部较低,对异常点比较敏感,为了照顾这些异常点,高斯分布的拟合结果偏离了大多数样本所在位置,方差也较大。相比之下,t 分布的尾部较高,对异常点不敏感,保证了其鲁棒性,因此其拟合结果更为合理,较好的捕获了数据的整体特征。

那么如何利用 t 分布的长尾性来改进 SNE 呢?我们来看下面这张图,注意这个图并不准确,主要是为了说明 t 分布是如何发挥作用的。
图中有高斯分布和 t 分布两条曲线,表示点之间的相似性与距离的关系,高斯分布对应高维空间,t 分布对应低维空间。那么对于高维空间中相距较近的点,为了满足 pij p i j = qij q i j ,低维空间中的距离需要稍小一点;而对于高维空间中相距较远的点,为了满足 pij p i j = qij q i j ,低维空间中的距离需要更远。这恰好满足了我们的需求,即同一簇内的点(距离较近)聚合的更紧密,不同簇之间的点(距离较远)更加疏远。

引入 t 分布之后,在低维空间中,用自由度为1的t分布重新定义 :

然后与原始 SNE 一样,我们使用 K-L 散度定义目标函数进行优化,从而求解。至此,关于 t-SNE 算法的原理部分,我们就介绍完了。
3、总结
总结一下 t-SNE 算法的改进:
- 把SNE变为对称SNE,提高了计算效率,效果稍有提升
- 在低维空间中采用了t分布代替原来的高斯分布,解决了拥挤问题,优化了SNE过于关注局部特征忽略全局特征的问题
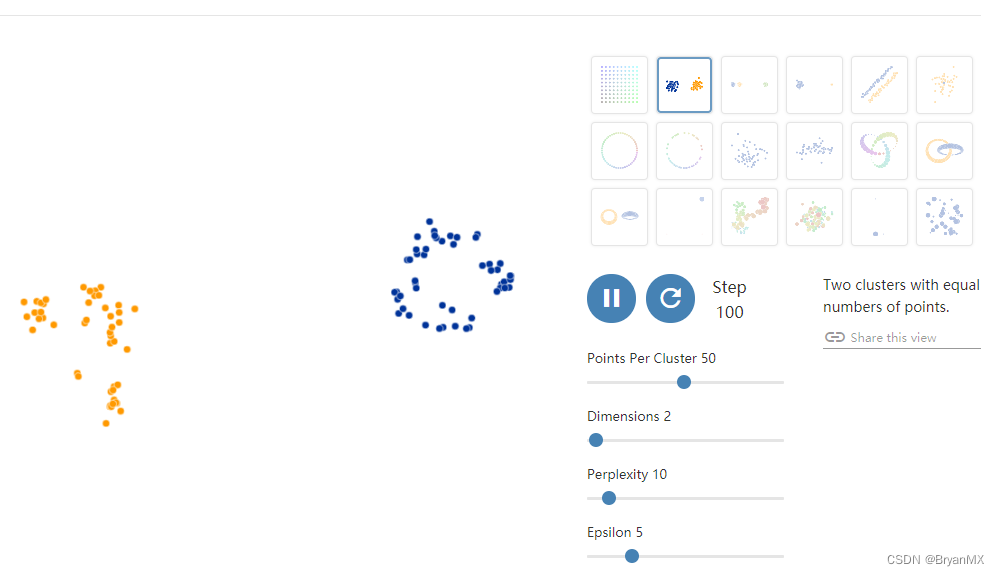
下面是 SNE 算法和 T-SNE 算法的可视化结果对比,可以看到, T-SNE 算法的效果要远远好于 SNE。
SNE:

T-SNE:

总结一下 t-SNE 算法的不足:
- 主要用于可视化,很难用于其他目的.比如降维到10维,因为t分布偏重长尾,1个自由度的 t 分布很难保存好局部特征,可能需要设置成更高的自由度;
- t-SNE 没有唯一最优解,且不能用于预测,比如测试集合降维,因为他没有显式的预估部分,不能在测试集合直接降维;
- 速度慢