本篇主要介绍很好的降维方法t-SNE的原理
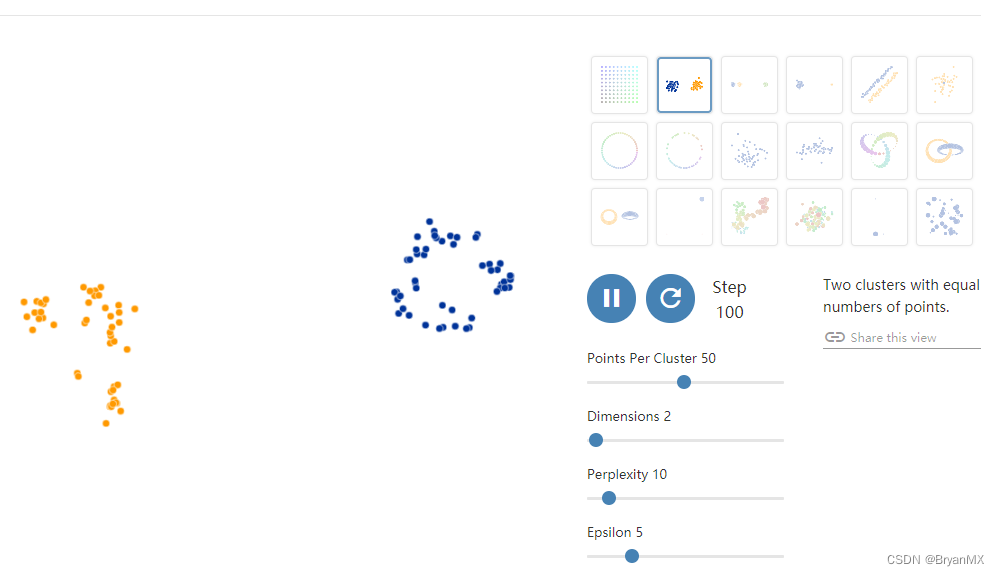
- 详细介绍了困惑度perplexity对有效点的影响
- 首先介绍了SNE
- 然后在SNE的基础上进行改进:1.使用对称式。2.低维空间概率计算使用t分布
t-SNE(t分布和SNE的组合)
- 以前的方法有个问题:只考虑相近的点在降维后应该接近,但没有考虑不相近的点在降维后应该比较远
- t-SNE主要原理为:

其中 S ( x i , x j ) S(x^i , x^j) S(xi,xj) 代表 x i x^i xi 与 x j x^j xj 之间的相似度
SNE
原理:

这里可以看做高斯函数, ∣ ∣ x i − x j ∣ ∣ 2 {||x_i - x_j||}^2 ∣∣xi−xj∣∣2 是自变量 , 也就是横坐标,高斯函数的值是纵坐标。方差越大,高斯函数越平滑,概率高的点就比较多。方差越小,函数越尖锐,概率大的点就比较少。可以认为,当我们在寻找一个点的邻近点时,方差可以调节我们寻找的主要邻近点的个数

特点
-
考虑计算原始空间中,其他所有点 j 与点 i 之间的距离,并转换为概率,代表相似程度
-
用指数,距离一拉开,相似度会迅速下降
-
我们的目标就是在目标空间中找其他所有点 j 与点 i 之间的距离,并转换为概率,且这个概率和原始空间的概率越接近越好
- 接近就代表着分布类似
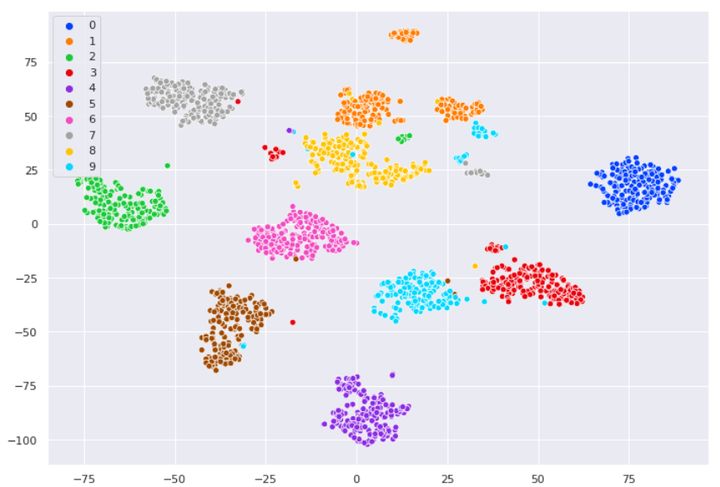
- 保证了离得近的点还离得近,离得远的点还离得远
- 这是该算法的很重要的优点
- 以前的算法要么只考虑距离远的点还要距离远,要么只考虑距离近的点还要距离近
- 计算量很大,因为每个点都要算 P 和 Q
困惑度(perplexity):


-
困惑度可以解释为有效邻居(其他点也考虑,只不过占比重太小了,不是有效邻居)的平滑方法
-
H ( P i ) H(P_i) H(Pi) 是 Shannon Entropy 。
-
用来解释混乱度,怎么理解混乱度呢?
- 比如一个分类任务,将一个物体分为两个类
- H = − ∑ ( p i ) log ( p i ) H = -\sum(p_i)\log(p_i) H=−∑(pi)log(pi)
- 如果分为第一个类的概率 p 1 = 1 p_1 = 1 p1=1 , 显然 p 2 = 0 p_2 = 0 p2=0 , 这时的 H = 0 + 0 = 0 H = 0 + 0 = 0 H=0+0=0 , 这时H小,意味着混乱度低,因为我们可以明确如何进行分类,所以不混乱
- 如果分为第一个类的概率 p 1 = 0.5 p_1 = 0.5 p1=0.5 , 显然 p 2 = 0.5 p_2 = 0.5 p2=0.5 , 这时 H = − ( 0.5 log 0.5 + 0.5 log 0.5 = − log 0.5 ) H = -(0.5\log0.5 \quad + \quad0.5\log0.5 = -\log0.5 ) H=−(0.5log0.5+0.5log0.5=−log0.5) 这时 , H的值达到最大。意味着混乱度高,因为我们无法确定如何分类
- 对应到混乱度函数的图像中,就是 p p p 的值越接近中间,混乱度越大,越接近两边,混乱度越小。
- 上面我们讨论的是两个 p p p 的情况 , 扩展到多个 p p p 也一样。各个 p p p 越靠近中间,混乱度越大(也就是 H 大)
-
如图,当 p p p 分布在两端时,函数的值比较小。如果 H H H 的值增大,则意味着,有更多的 p p p 往中间分布了(左边的往右移动,右边的往左移动),也就是我们在大 p p p 和小 p p p 之间做了一个均衡 ,小的 p p p 变大了 , 大的 p p p 变小了,各个 p p p 更接近了。这时候就代表着,我们在寻找一个点的邻近点时,考虑了更多的有效点(以前有些离得太远的点没有认定为有效点)
-
将 p p p 的值放到下面的高斯函数图像中观察,这就对应 σ \sigma σ 更大。也就是高斯分布更平滑了。因为,高斯分布越平滑,能获得比较大的值的点越多,也就是距离稍远的点也有不错的高斯函数值。这些点对应的 p p p 也就变大了,对loss的影响也变大,成为有效点。
-

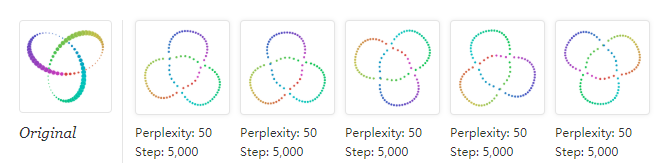
也就是说,我们可以通过调节困惑度 perplexity 来调节 H , 进而调节 σ \sigma σ
- 困惑度越大 , H就越大 , σ \sigma σ 就越大 , 我们在寻找一个点的邻近点的时候就会考率更多的有效点
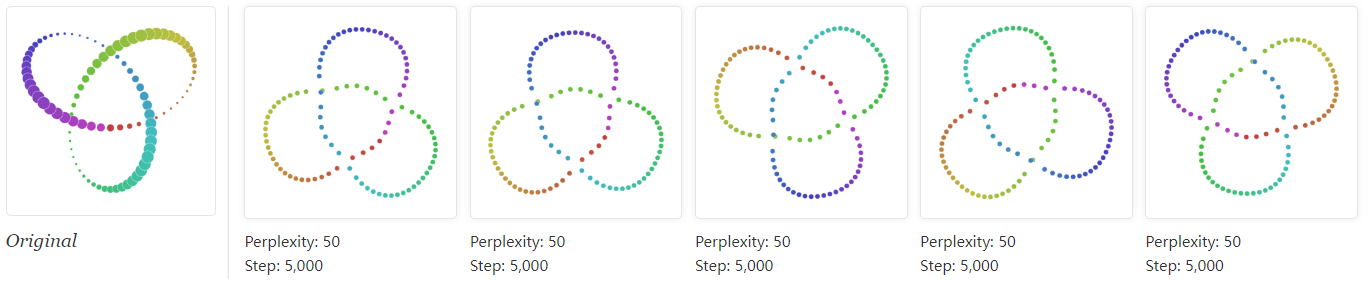
- 困惑度越大,越考虑全局(考虑的点更多,更远),困惑度越小,越考虑局部(考虑的点更少,更近)
评价标准:K-L散度
C = ∑ i K L ( P i ∥ Q i ) = ∑ i ∑ j p j ∣ i log p j ∣ i q j ∣ i C=\sum_{i} K L\left(P_{i} \| Q_{i}\right)=\sum_{i} \sum_{j} p_{j \mid i} \log \frac{p_{j \mid i}}{q_{j \mid i}} C=∑iKL(Pi∥Qi)=∑i∑jpj∣ilogqj∣ipj∣i
-
p j ∣ i p_{j|i} pj∣i 越大 , q j ∣ i q_{j|i} qj∣i 越小时 , 此时的Cost越高。即高维空间的点越接近,映射到低维空间时反而越远,此时的惩罚是很大的,这是正确的情况。
-
p j ∣ i p_{j|i} pj∣i 越小 , q j ∣ i q_{j|i} qj∣i 越大时 , 此时的Cost越小。即高维空间的点距离远时,映射到低维空间的点接近时,此时的惩罚却很小,这时跟我们想要的结果正好相反。
这个问题也是t-SNE的一个缺点。因此SNE倾向于保留局部特征,即让高维离得近的点尽可能在低维时聚在一起,但是不考虑不同类间的间隔,直观理解为:整个降维后的图像会比较“拥挤”(原因就是上面这个,导致长程斥力不够)
t-SNE
优化:相较于SNE,有两方面优化:
- 优化了 p 和 q 的对称性
- 使用 t 分布优化了 q
对称性:
注意到,概率函数具有不对称性,即 P i ∣ j ≠ P j ∣ i P_{i|j} \ne P_{j|i} Pi∣j=Pj∣i 且 Q i ∣ j ≠ Q j ∣ i Q_{i|j} \ne Q_{j|i} Qi∣j=Qj∣i ,因为分母不一样。这与我们的直觉不符,无论 x i x_i xi 和 x j x_j xj 谁作为中心,其出现在对方附近的概率应该是相同的

当然我们也可以在原空间(高维空间)中定义

但是这样会带来问题:假设点 x i x_i xi 是一个噪声点,那么 ∣ x i − x j ∣ |x_i - x_j| ∣xi−xj∣ 的平方会很大,那么对于所有的 j, p i j p_{ij} pij 的值都会很小,导致在低维映射下的 y i y_i yi 对整个损失函数的影响很小,但对于异常值,我们显然需要得到一个更大的惩罚
于是我们定义: p i j = p i ∣ j + p j ∣ i 2 n p_{ij} = \frac{p_{i|j} + p_{j|i}}{2n} pij=2npi∣j+pj∣i
这样既保证了对称,又不会导致概率值像上面一样小(因为如果 i i i 是噪声 , 那么 P i ∣ j P_{i|j} Pi∣j 就会比 P j ∣ i P_{j|i} Pj∣i 大得多)
t分布优化q
t分布优化后的q
q i j = ( 1 + ∥ y i − y j ∥ 2 ) − 1 ∑ k ≠ l ( 1 + ∥ y i − y j ∥ 2 ) − 1 q_{i j}=\frac{\left(1+\left\|y_{i}-y_{j}\right\|^{2}\right)^{-1}}{\sum_{k \neq l}\left(1+\left\|y_{i}-y_{j}\right\|^{2}\right)^{-1}} qij=∑k=l(1+∥yi−yj∥2)−1(1+∥yi−yj∥2)−1
梯度
δ C δ y i = 4 ∑ j ( p i j − q i j ) ( y i − y j ) ( 1 + ∥ y i − y j ∥ 2 ) − 1 \frac{\delta C}{\delta y_{i}}=4 \sum_{j}\left(p_{i j}-q_{i j}\right)\left(y_{i}-y_{j}\right)\left(1+\left\|y_{i}-y_{j}\right\|^{2}\right)^{-1} δyiδC=4∑j(pij−qij)(yi−yj)(1+∥yi−yj∥2)−1
当 q i j q_{ij} qij 太大或者太小时,也就是 ( y i − y j ) (y_i - y_j) (yi−yj) 太大或者太小,都会导致梯度趋近于0 , 这不利于更新点 i i i 的坐标,这是目前的一个问题。不过一般情况下,这种情况出现比较少,而且其他点的的更新也会影响点 i i i 的梯度
映射后的样本相似度采用 t-分布的一种,是对SNE的改进,这里改变的是 q , 且 q 已经经过对称优化了

横轴表示距离,纵轴表示相似度, 可以看到,对于较大相似度的点,t分布在低维空间中的距离需要稍小一点;而对于低相似度的点,t分布在低维空间中的距离需要更远。这恰好满足了我们的需求,即同一簇内的点(距离较近)聚合的更紧密,不同簇之间的点(距离较远)更加疏远。
一句话来说:因为我们的目的是令 q i j q_{ij} qij 与 p i j p_{ij} pij 相等。若达成这个目标,在低维空间中,近的点会更近,远的点会更远