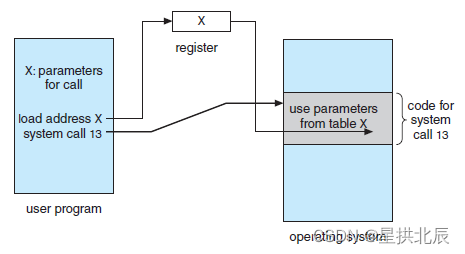
1、系统调用
操作系统的主要功能是为管理硬件资源和为应用程序开发人员提供良好的环境来使应用程序具有更好的兼容性,为了达到这个目的,
内核提供一系列具备预定功能的多内核函数,通过一组称为系统调用(system call)的接口呈现给用户。系统调用把应用程序的请求
传给内核,调用相应的的内核函数完成所需的处理,将处理结果返回给应用程序。
现代的操作系统通常都具有多任务处理的功能,通常靠进程来实现。由于操作系统快速的在每个进程间切换执行,所以一切看起来就
会像是同时的。同时这也带来了很多安全问题,例如,一个进程可以轻易的修改进程的内存空间中的数据来使另一个进程异常或达到
一些目的,因此操作系统必须保证每一个进程都能安全的执行。这一问题的解决方法是在处理器中加入基址寄存器和界限寄存器。这
两个寄存器中的内容用硬件限制了对储存器的存取指令所访问的储存器的地址。这样就可以在系统切换进程时写入这两个寄存器的内
容到该进程被分配的地址范围,从而避免恶意软件。
为了防止用户程序修改基址寄存器和界限寄存器中的内容来达到访问其他内存空间的目的,这两个寄存器必须通过一些特殊的指令来
访问。通常,处理器设有两种模式:“用户模式”与“内核模式”,通过一个标签位来鉴别当前正处于什么模式。一些诸如修改基址寄存器
内容的指令只有在内核模式中可以执行,而处于用户模式的时候硬件会直接跳过这个指令并继续执行下一个。
同样,为了安全问题,一些I/O操作的指令都被限制在只有内核模式可以执行,因此操作系统有必要提供接口来为应用程序提供诸如读
取磁盘某位置的数据的接口,这些接口就被称为系统调用。
当操作系统接收到系统调用请求后,会让处理器进入内核模式,从而执行诸如I/O操作,修改基址寄存器内容等指令,而当处理完系统
调用内容后,操作系统会让处理器返回用户模式,来执行用户代码。
2、系统调用原理
操作系统中的状态分为管态(核心态)和目态(用户态)。特权指令:一类只能在核心态下运行而不能在用户态下运行的特殊指令。
不同的操作系统特权指令会有所差异,但是一般来说主要是和硬件相关的一些指令。访管指令:本身是一条特殊的指令,但不是特权指令。
(trap指令)。基本功能:“自愿进管”,能引起访管异常。
用户程序只在用户态下运行,有时需要访问系统核心功能,这时通过系统调用接口使用系统调用。
3、系统调用与过程(函数)调用的区别
程序中执行系统调用或过程(函数)调用,虽然都是对某种功能或服务的需求,但两者从调用形式到具体实现都有很大区别。
(1)调用形式不同。
过程(函数)使用一般调用指令,其转向地址是固定不变的,包含在跳转语句中;但系统调用中不包含处理程序入口,而仅仅提供功能号,
按功能号调用。
(2)被调用代码的位置不同。
过程(函数)调用是一种静态调用,调用者和被调用代码在同一程序内,经过连接编辑后作为目标代码的一部份。当过程(函数)升级或
修改时,必须重新编译连结。而系统调用是一种动态调用,系统调用的处理代码在调用程序之外(在操作系统中),这样一来,系统调用
处理代码升级或修改时,与调用程序无关。而且,调用程序的长度也大大缩短,减少了调用程序占用的存储空间。
(3)提供方式不同。
过程(函数)往往由编译系统提供,不同编译系统提供的过程(函数)可以不同;系统调用由操作系统提供,一旦操作系统设计好,
系统调用的功能、种类与数量便固定不变了。
(4)调用的实现不同。
程序使用一般机器指令(跳转指令)来调用过程(函数),是在用户态运行的;程序执行系统调用,是通过中断机构来实现,需要从
用户态转变到核心态,在管理状态执行,因此,安全性好。
函数库调用是语言或应用程序的一部分,而系统调用是操作系统的一部分。

库函数调用通常比行内展开的代码慢,因为它需要付出函数调用的开销。但系统调用比库函数调用还要慢很多,因为它需要把上下文环
境切换到内核模式。
说明:本文内容来自百度百科,以及操作系统书中。