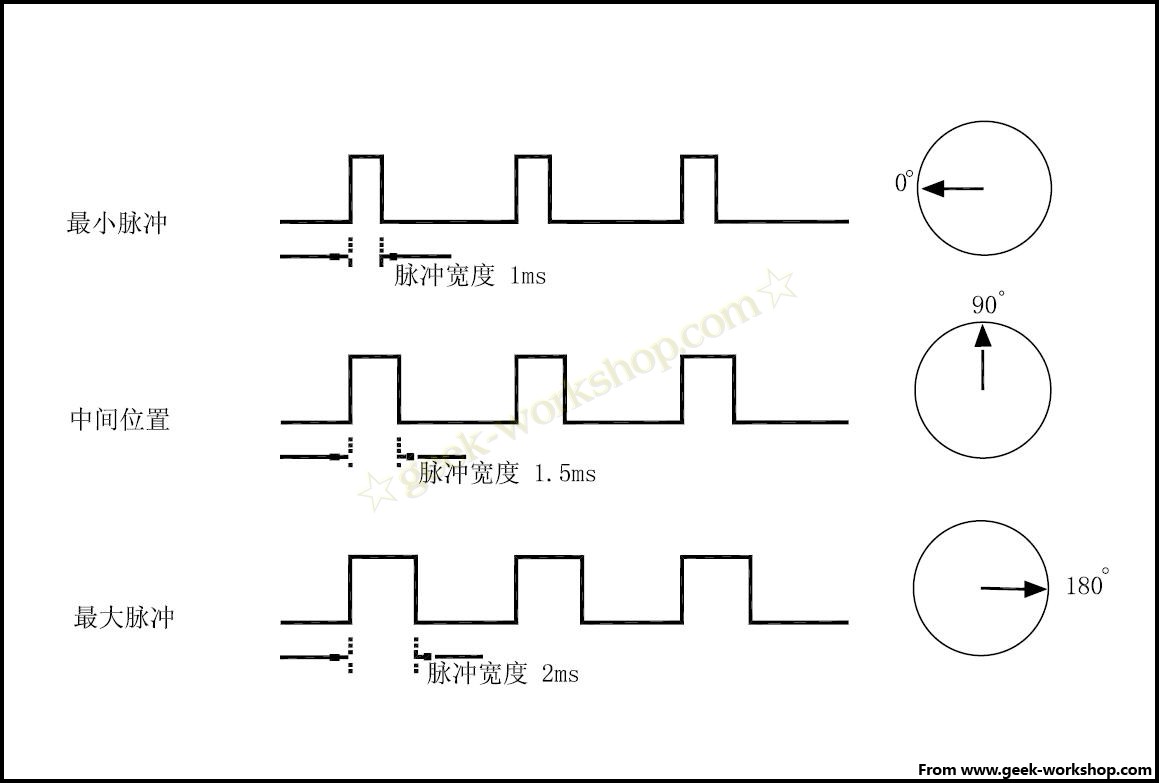
舵机的控制一般需要一个20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度舵机为例,那么对应的控制关系是这样的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
如下图可形象地表示脉冲与角度关系
[cpp] view plain copy 

- #include <reg52.h>
- unsigned char count; //0.5ms次数标识
- sbit pwm=P1^0; //信号输出
- sbit jia=P1^1; //角度增加按键
- sbit jan=P1^2; //角度减小按键
- char jd; //角度标识
- void delay(unsigned int i)
- {
- unsigned int j,k;
- for(j=i;j>0;j--)
- for(k=125;k>0;k--);
- }
- void Time0_init() //定时器初始化
- {
- TMOD=0x01;
- IE=0x82;
- TH0=0xff;
- TL0=0x19; //12晶振,0.25ms
- TR0=1; //定时器开始
- }
- void Time0_int() interrupt 1 //中断程序
- {
- TH0=0xff;
- TL0=0x19;
- if(count<jd) //输出count个高电平
- pwm=1;
- else
- pwm=0; //其余输出低电平
- count++;
- count=count%40; //时钟保持40个count 即20ms
- }
- void keyscan() //按键扫描
- {
- if(jia==0) //角度增加键是否按下
- {
- delay(50); //按下延时,消抖
- if(jia==0)
- {
- jd++; //角度标识加1
- count=0; //按键按下,则20ms周期重新开始
- if(jd==50)
- jd=9; //已经是180°则保持
- while(jia==0); //等待按键放开
- }
- }
- if(jan==0) //角度减小键是否按下
- {
- delay(10);
- if(jd==0);
- {
- jd--; //角度标识减1
- count=0;
- if(jd==0)
- jd=1;
- while(jan==0);
- }
- }
- }
- void main()
- {
- jd=1;
- count=0;
- Time0_init();
- while(1)
- {
- keyscan();
- // display();
- }
- }