虚基类
1.虚基类存在的意义
当在多条继承路径上有一个公共的基类,在这些路径中的某几条汇合处,这个公共的基类就会产生多个实例(或多个副本),若只想保存这个基类的一个实例,可以将这个公共基类说明为虚基类。
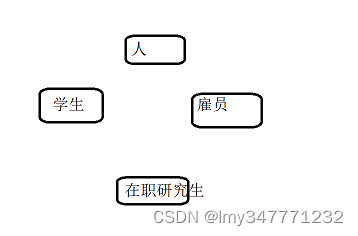
在继承中产生歧义的原因有可能是继承类继承了基类多次,如概述图所示,子类C最后会接受分别来自A和B的同一个或多个相同拷贝,从而产生了多个拷贝,即不止一次的通过多个路径继承类在内存中创建了基类成员的多份拷贝。而这些是A和B从父类继承而来,所以C类该继承A还是B传下来的还是都接受呢?
2.虚基类的定义方式:
虚基类(virtual base class)定义方式如下:
class 派生类名:virtual 访问限定符 基类类名{…};
class 派生类名:访问限定符 virtual 基类类名{…};
不用虚基类时产生的数据冗余和二义性问题:
如下代码属于菱形继承方式:
下面是不用虚基类处理此继承关系时的代码:
class person
{public:string _pname;string _sex;person(){cout << "Create person " << endl;}person(string& pname ):_pname(pname){cout << "Create person " << endl;}virtual ~person() { cout << "Destroy person" << endl; }void fun(){cout << "person::fun()" << endl;}
};
class student :public person
{
public:string _id;student() { cout << "Create student" << endl; }student(string &sname,string &id) : _id(id){person::_sex = "男";cout << "Create student" << endl;}~student() { cout << "Destroy student" << endl; }virtual void fun(){cout << "student::fun" << endl;}
};
class employee :public person
{
protected:string _ename;
public:employee(string name):_ename(name){person::_sex = "女";cout << "Create employee" << endl;}~employee() { cout << "Destroy employee" << endl; }
};
class estudent :public student,public employee
{
protected:string _esname;
public:estudent(string esname,string &id):student(esname,id),_esname(esname){cout << "Create estudent" << endl;}~estudent() {}virtual void fun(){cout << "estudent::fun" << endl;}
};int main()
{string esname{ "李华" };string sex{ "女" };string id{ "202201" };person s;estudent es1(esname, id);student es2(esname, id);es1._sex = { "女" };//errores2._sex= { "女" };//ok !return 0;
}
我们可以发现想调动estudent类的成员时,编译器不知道你到底想调用哪个类中的person 属性。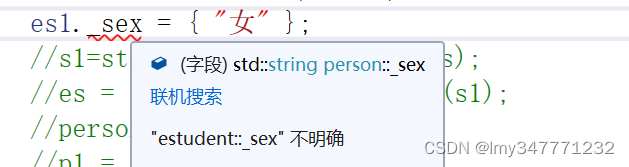
我们访问人类型中的_sex 属性,如果不明确是哪个类中的_sex则无法编译通过。如果我们只想要一个person类的实例,那就要用到虚基类。
虚基类的处理代码:
class person
{public:string _pname;string _sex;person(){cout << "Create person " << endl;_sex={"男"};}person(string& pname ):_pname(pname){cout << "Create person " << endl;}virtual ~person() { cout << "Destroy person" << endl; }void fun(){cout << "person::fun()" << endl;}
};
class student :public virtual person
{
public:string _id;student() { cout << "Create student" << endl; }student(string &sname,string &id) : _id(id){cout << "Create student" << endl;}~student() { cout << "Destroy student" << endl; }virtual void fun(){cout << "student::fun" << endl;}
};
class employee :public virtual person
{
protected:string _ename;
public:employee(string name):_ename(name){cout << "Create employee" << endl;}~employee() { cout << "Destroy employee" << endl; }
};
class estudent :public student,public employee
{
protected:string _esname;
public:estudent(string esname,string &id):student(esname,id),employee(esname),_esname(esname){cout << "Create estudent" << endl;}~estudent() {}virtual void fun(){cout << "estudent::fun" << endl;cout<<"person::_sex"<<person::_sex<<endl;}
};int main()
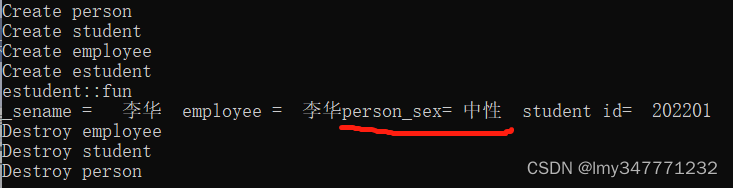
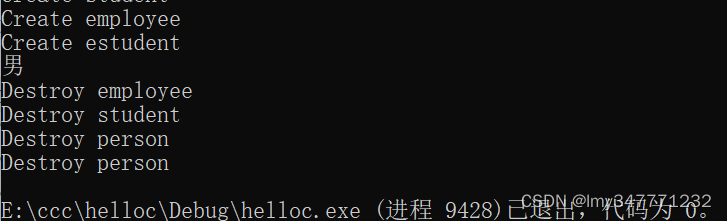
{string esname{ "李华" };string id{ "202201" };person s;estudent es1(esname, id);esl._sex={"中性"};es1.fun();return 0;
注意,一旦使用虚基类,那么派生类中构造函数中的基类的属性就不用传参了,因为没有必要。
编译器不同,虚表指针指向的处理方式就会不同。
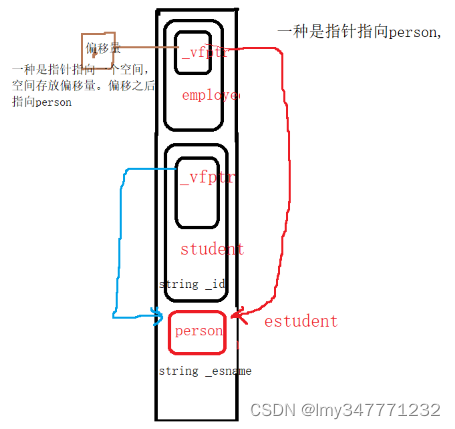
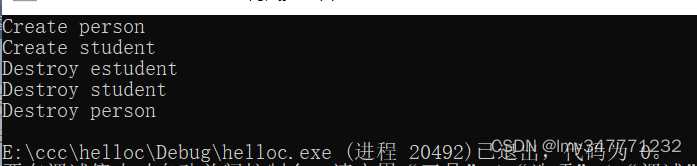
可以看到 person 只有单独一份。
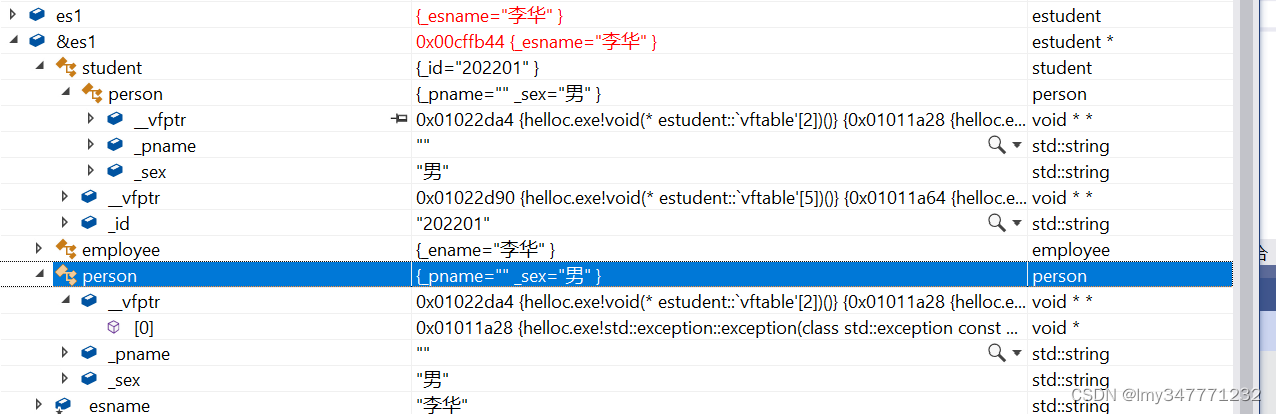
接下来是一个测试,看能不能成功打印_sex;
int main()
{string esname{ "李华" };string id{ "202201" };//person s;estudent es1(esname, id);person*ps=&es1;cout<<ps->_sex<<endl;return 0;
结果是可以打印的,也就是说会指针自动偏移到person类。但是这个结果放在不同的编译器可能会不一样,有的可能不会自动偏移。
静态转化和动态转换
int main()
{
person s;//cout<<s._sex << endl;estudent es1(esname, id);string s1;person* ps = &es1;estudent* pest = static_cast<estudent*>(ps);//如果没有虚基类,则此静态转换可以成功。}
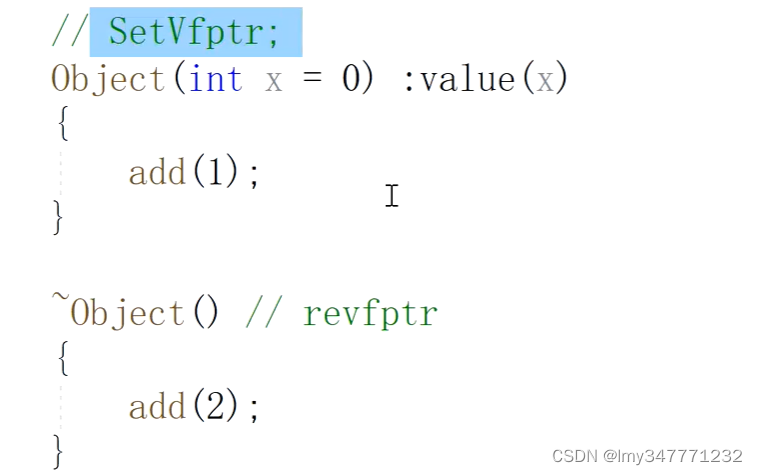
虚析构函数
一个重要的作用:重置虚表指针(析构时设置虚表指针指向自己类型的虚表)
class object
{int value;
public:object(int x=0):value(x){ add(); }~object(){ add(); }virtual void add(int x = 10) { cout << "object ::add x " << x << endl; }};
class base :public object
{
public:int num;public:base(int x = 0) :object(x + 10), num(x) { add(100); }~base() { add(200); }virtual void add(int x ){cout << "base::add x: " << x << endl;}
};
int main()
{base base;return 0;
}

可以看到 ,在构造函数和析构函数中调动的函数,查虚表与否的结果都是一样的。编译器在优化时选择不再查虚表。
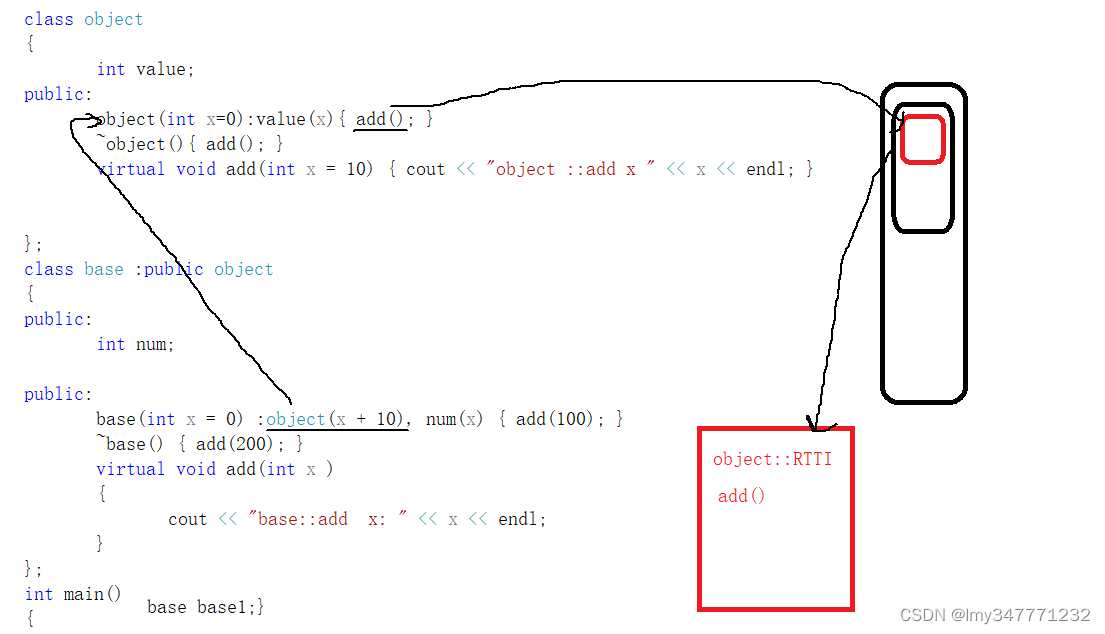
在obj的构造函数中调动add函数前已经完成了虚表和虚表指针的设置,obj的构造函数中调动add函数时,将会调动的是它自己的虚表。(虚表指针的指向的是obj的虚表)
在进行指针指向对象的操作时对象的析构有时会出现内存的泄漏:
1)虚构函数前没有加vitual 关键字的情况:
class person
{public:string _pname;string _sex;~person() { cout << "Destroy person" << endl; }
};
class student :public person
{
public:string _id;~student() { cout << "Destroy student" << endl; }}
};class estudent :public student,public employee
{
protected:string _esname;
public:~estudent() {}
};
int main(){
string esname{ "李华" };string sex{ "女" };string id{ "202201" };student* s1 = new estudent();delete s1;}

可以看到泄漏了estudent对像。
2)虚析构函数前加了vitual 关键字的情况:
class person
{
public:virtual ~person() { cout << "Destroy person" << endl; }
};class estudent :public student,public employee
{
public:~estudent() {}
};
在虚析构函数析构时会查虚表。
运行时的多态
类型名+ 点的形式属于编译时的多态。
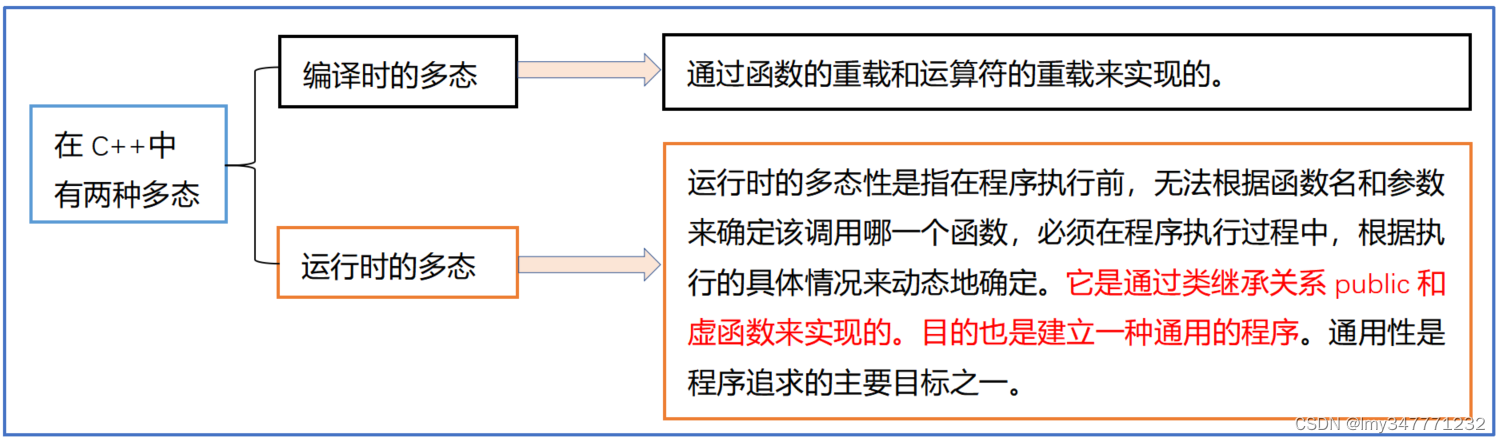
运行时的多态:
总结:运行时的多态性: 公有继承 + 虚函数 + (指针或引用调用虚函数)。
int main()
{
person s;estudent es1(esname, id);person* ps = &es1;}
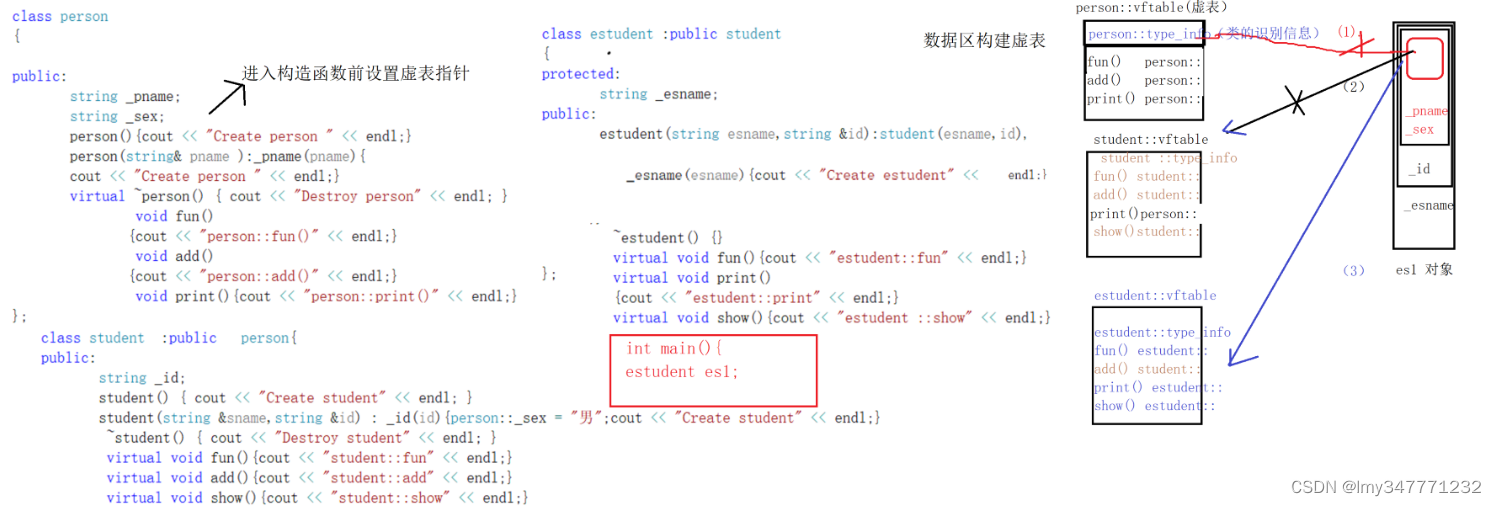
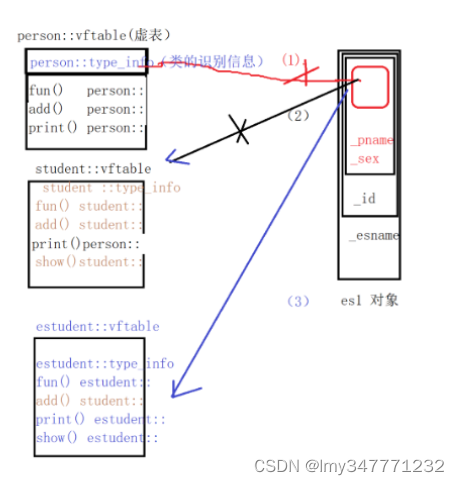
多态的原理
虚函数表的示例:运行时多态的原理
虚函数指针表简称虚表, 虚表就是虚函数指针的集合,虚函数指针表本质是一个存储虚函数指针的指针数组,这个数组的首元素之上存储RTTI(运行时类型识别信息的指针),从数组下标0开始依次存储虚函数地址, 最后面放了一个nullptr。
虚函数指针表存储在只读数据段(.rodata)
静态联编和动态联编:
静态联编(static binding)早期绑定: 静态联编是指在编译和链接阶段,就将函数实现和函数调用关联起来。
动态联编(dynamic binding)亦称滞后联编(late binding)或晚期绑定: 动态联编是指在程序执行的时候才将函数实现和函数调用关联起来。
C++语言中,使用类类型的引用或指针调用虚函数(成员选择符“->”),则程序在运行时选择虚函数的过程,称为动态联编
关于动态联编的几个例子
1.当派生类的对象属性不是公有,属性值有初始值的情况:
class object
{
public://virtual void fun(object *const this,int a = 10)constvirtual void fun(int a = 10)const{cout << "object ::fun::a :" << a << endl;}
};
class base :public object
{
private:virtual void fun(int x = 20)const{cout << "base::fun x: " << x << endl;}
};
int main()
{base base1;object* op =&base1;base1.fun()//base(&base1);op->fun();return 0;
}

先看流程
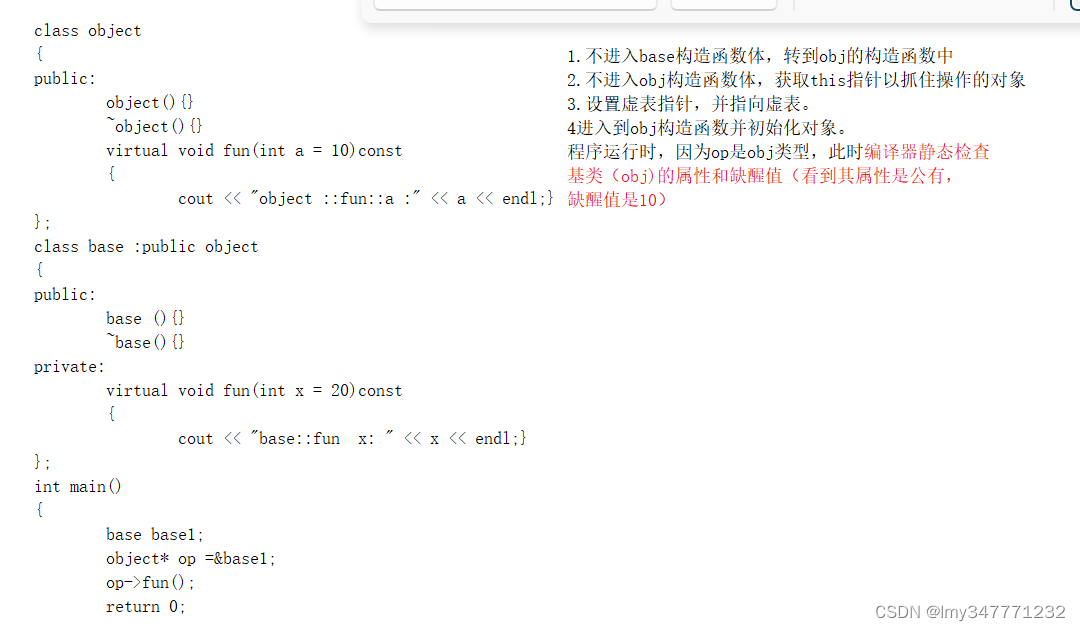
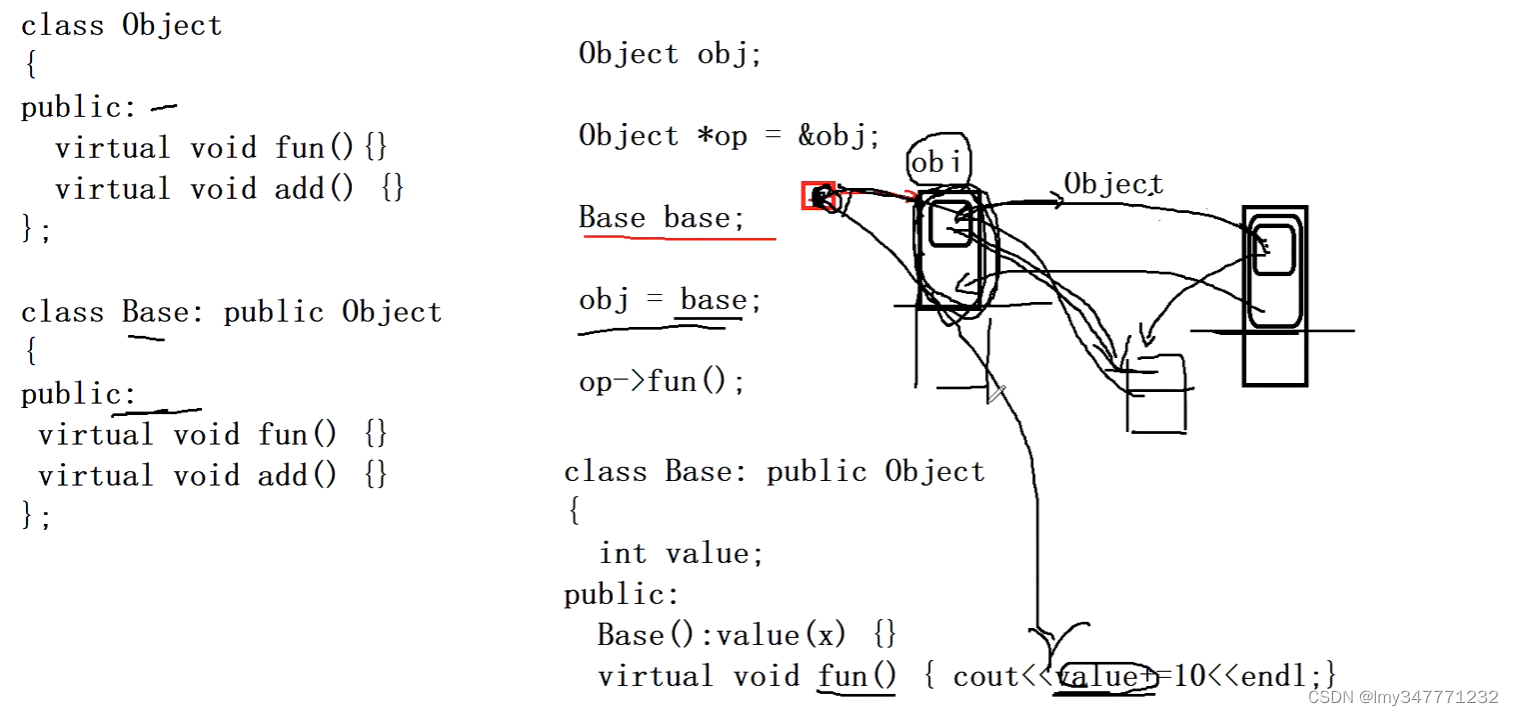
我们把下图右侧的es1对象当作base1对象,当拿obj类型的指针指向base1对象时,op就指向了此对象的首地址,也就是把this指针给给op,op指向了base1的虚表。所以就算op是obj类型,调动的fun()函数也是base的虚表。
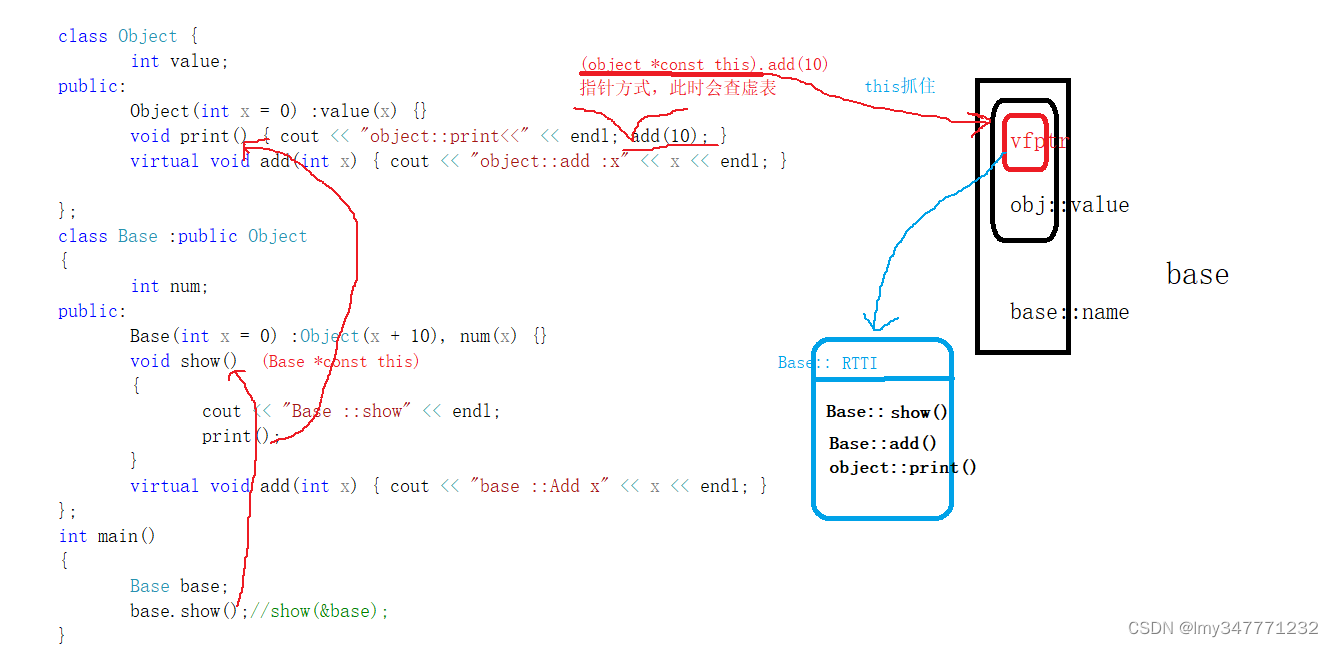
示例2:
class Object {int value;
public:Object(int x = 0) :value(x) {}void print() { cout << "object::print<<" << endl; add(10); }virtual void add(int x) { cout << "object::add :x" << x << endl; }};
class Base :public Object
{int num;
public:Base(int x = 0) :Object(x + 10), num(x) {}void show(){cout << "Base ::show" << endl;print();}virtual void add(int x) { cout << "base ::Add x" << x << endl; }
};
int main()
{Base base;base.show();//show(&base);
}
流程如图:
思考:
int main()
{Base base;Object &ob = base;ob.print(); 是什么结果?//Object ob = base;//ob.print(); 又是什么结果?
}
Object &ob = base;
以引用的方式调动虚函数将会查引用于Base的虚表。
Object ob = base;
以值传递,调动的obj的虚表。
示例3:memset 与虚表指针
class object
{int val;int data[10];
public:object() { memset(this, 0, sizeof(object)); }virtual void fun(){cout << "fun " << endl;}
};int main(){object obj;object* op = &obj;obj.fun();op->fun();}
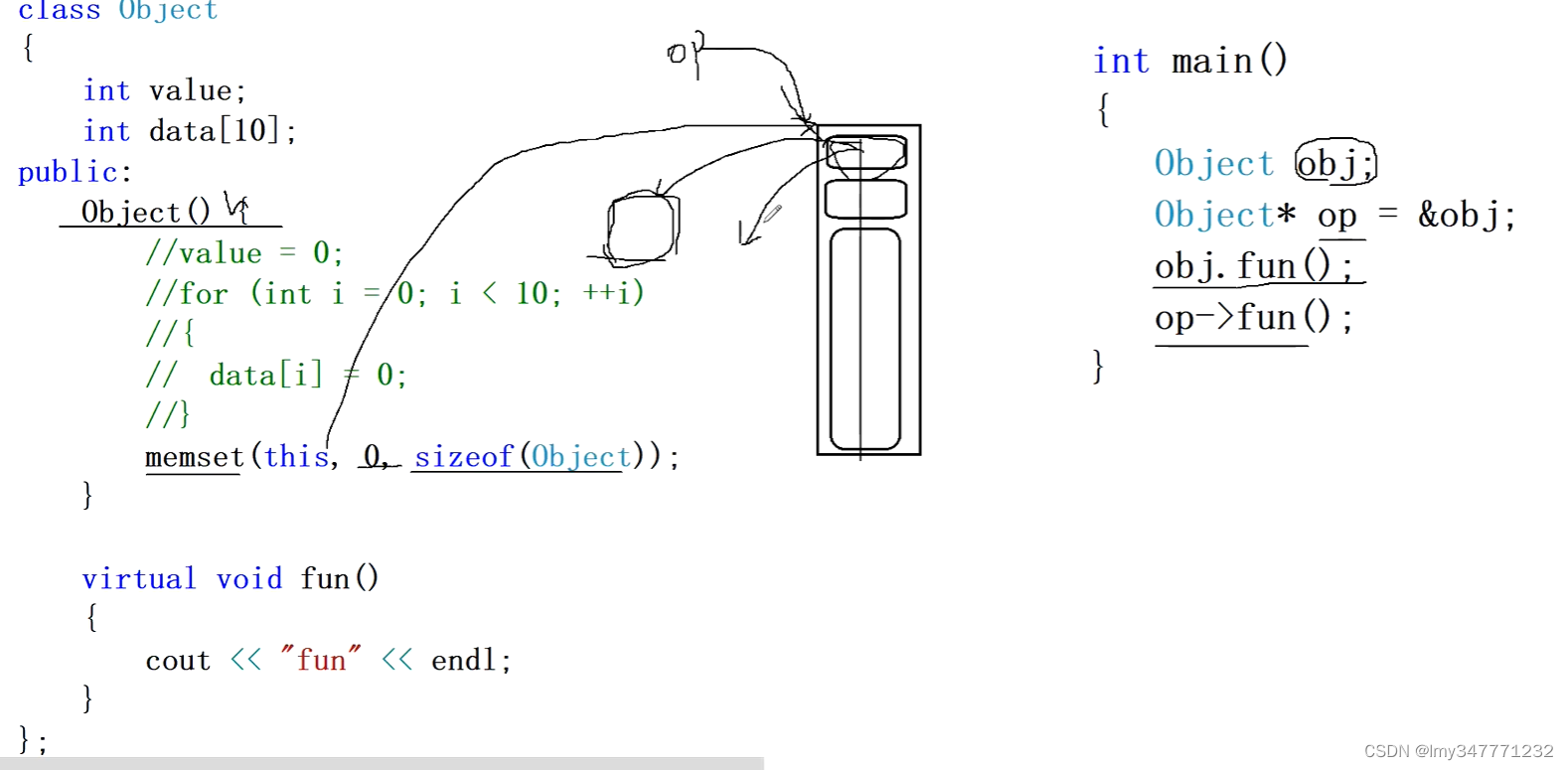
memset是计算机中C/C++语言初始化函数。作用是将某一块内存中的内容全部设置为指定的值, 这个函数通常为新申请的内存做初始化工作。
当使用memset初始化obj对象时,对象内存中的虚表指针连同整个空间全部被置为空。所以此时用此函数时比较危险的。
示例4 :this 指针与 虚表指针
using namespace std;
class object
{int val;
public:object(int x=0):val(x) { }void show() { cout << "object::show " << endl; }void print(){cout << "object::val " << val << endl;}
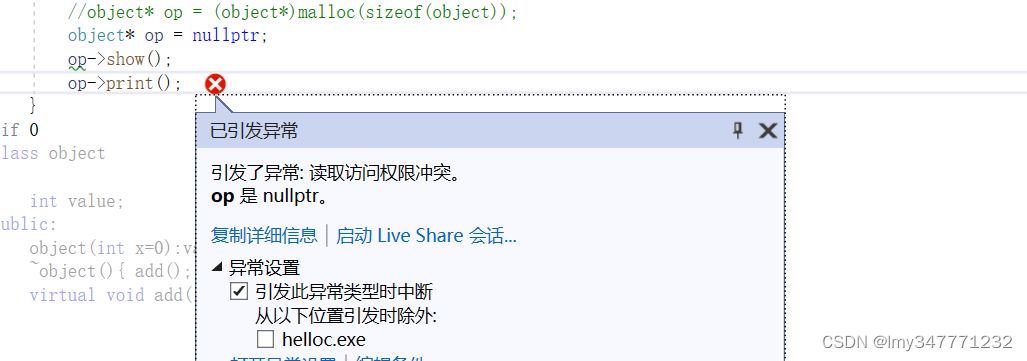
};int main(){object *op=nullptr;op->show();op->print();}
打印结果??
show可以打印,因为打印的值不用this操作。而print要打印属性值,没有this指针,编译器报错。
class object
{int val;
public:object(int x=0):val(x) { }void show() { cout << "object::show " << endl; }void print(){cout << "object::val " << hex<<val << endl;}
};
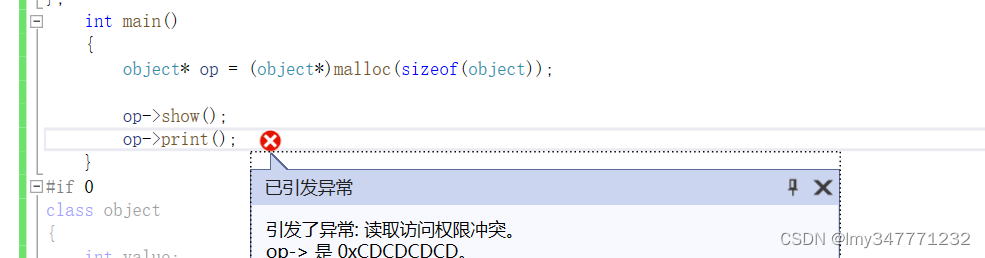
int main(){object* op = (object*)malloc(sizeof(object));op->show();op->print();}
打印结果?
编译器认为op指向了一个对象,op指向了val,但这个对象没有初始化,所以是个随机值、(cdcdcdcdc是未初始化的数据值)。
class object
{int val;
public:object(int x=0):val(x) { }void show() { cout << "object::show " << endl; }virtual void print(){cout << "object::val " << hex<<val << endl;}
};
int main(){object* op = (object*)malloc(sizeof(object));op->show();op->print();}
print函数加了个虚,那么打印结果?
show可以正常打印、
因为只是开辟空间,并没有实例化对象,没有调用构造函数,不能设置虚表指针。
示例5:
int main(){object* op = (object*)malloc(sizeof(object));object ob;*op=ob;op->show();op->print();}
打印结果?
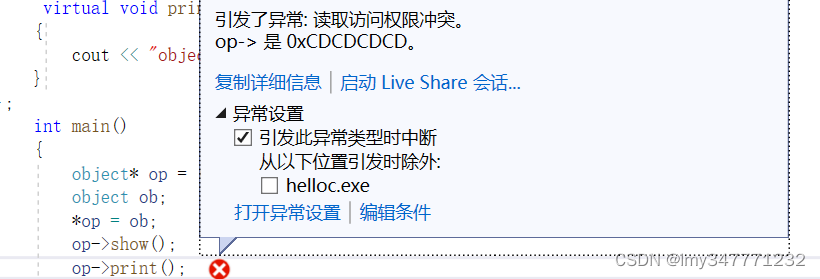
蓝色是ob,黑色是*op
op->指向的对象被ob赋值(编译器认为,其实没有对象只有空间),缺醒的赋值重载只赋值数据域不赋值指针域。所以show()正常,print失败。
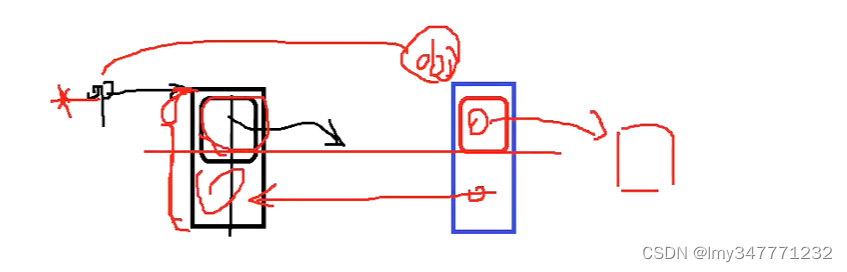
为什么只赋值数据域?
这里是引用
假如base给给obj的切片现象不仅赋值派生类中基类的数据域,也赋值派生类指向的虚表指针,那么op在指向base的虚表时要打印派生类的属性成员的值,但op指向的是基类object的对象,没有value成员(obj没有被赋值子对象的空间),所以这在逻辑上是行不通的。