舵机的原理和控制
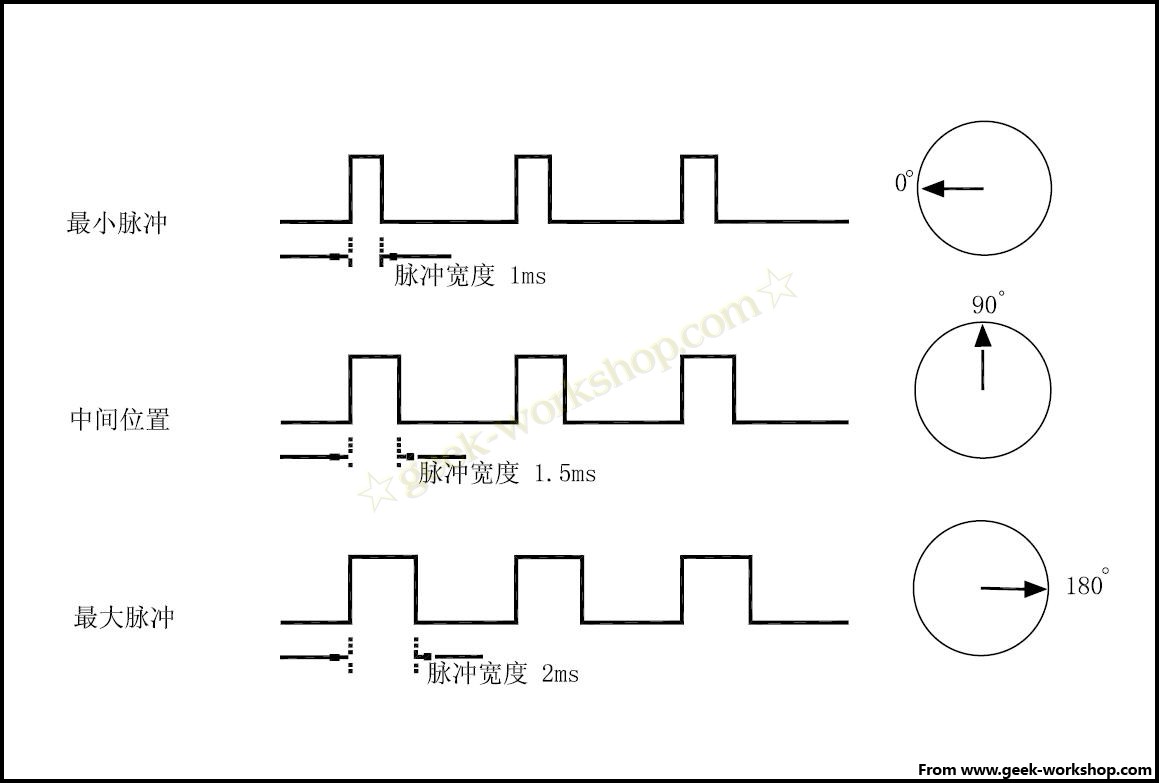
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。以180度角度伺服为例,那么对应的控制关系是这样的:
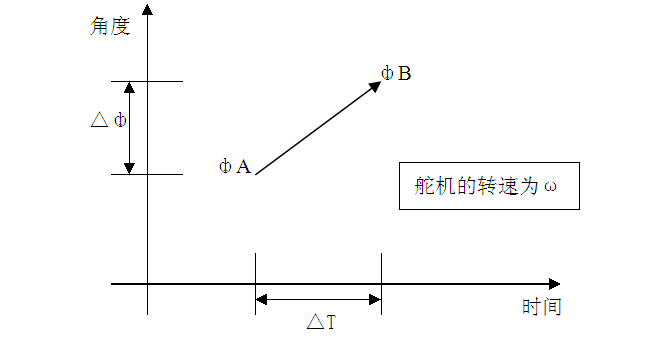
0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; (1)舵机的追随特性 假设现在舵机稳定在A点,这时候CPU发出一个PWM信号,舵机全速由A点转向B点,在这个过程中需要一段时间,舵机才能运动到B点。 保持时间为Tw
当Tw≥△T时,舵机能够到达目标,并有剩余时间; 当Tw≤△T时,舵机不能到达目标; 理论上:当Tw=△T时,系统最连贯,而且舵机运动的最快。 实际过程中w不尽相同,连贯运动时的极限△T比较难以计算出来。 假如我们的舵机1DIV =8us,当PWM信号以最小变化量即(1DIV=8us)依次变化时,舵机的分辨率最高,但是速度会减慢。
舵机的原理和控制
article/2025/10/7 13:02:06
相关文章
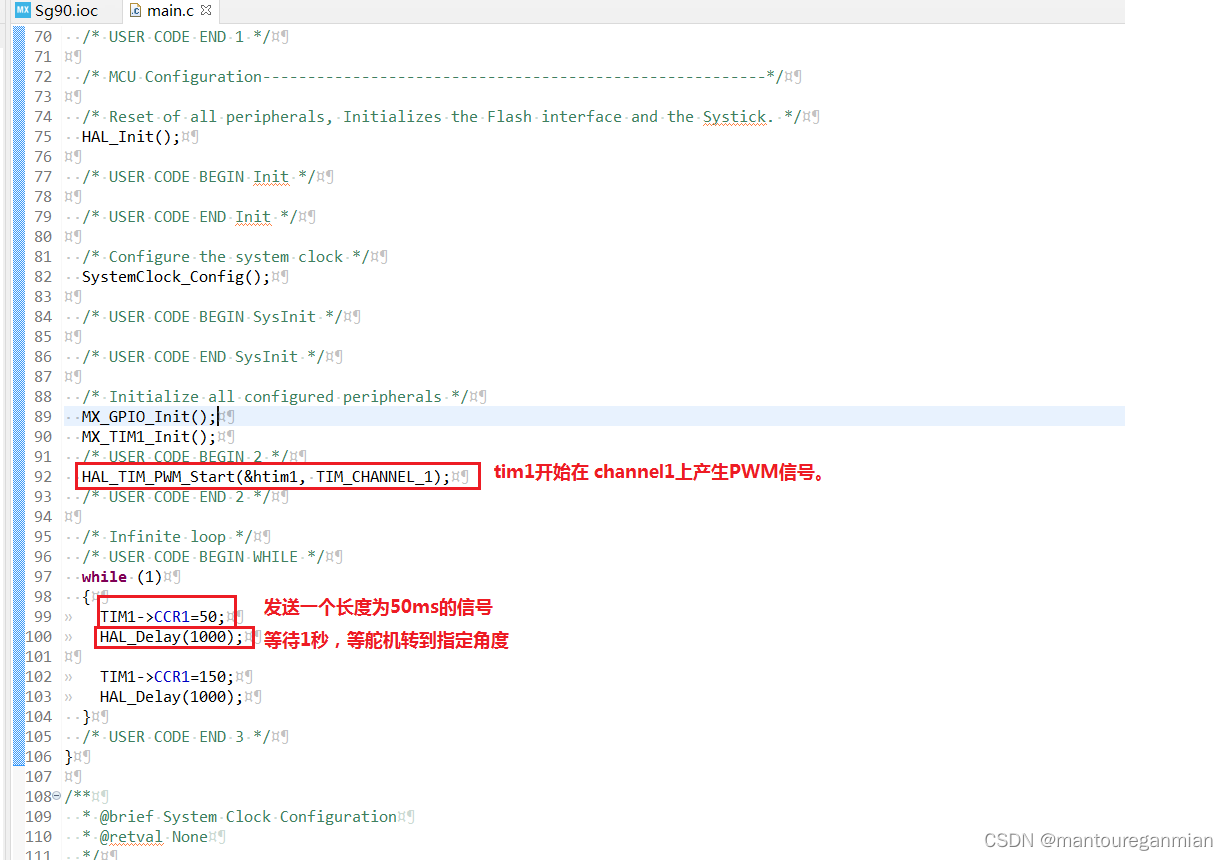
小白入门STM32(2)---控制SG90舵机---基础工作原理详解
文章目录 序言一、基础理论1.1 舵机控制原理--PWM习题 1.2 定时器1.2.1 基础定时器时钟装置循环计数器 1.2.2 比较定时器习题 二、实战上手2.1 设置定时器和单片机接线习题 2.2 代码 三、习题答案 序言
本人一枚软件编程人员,有一定C语言基础,目前自学S…

51单片机SG90舵机控制原理
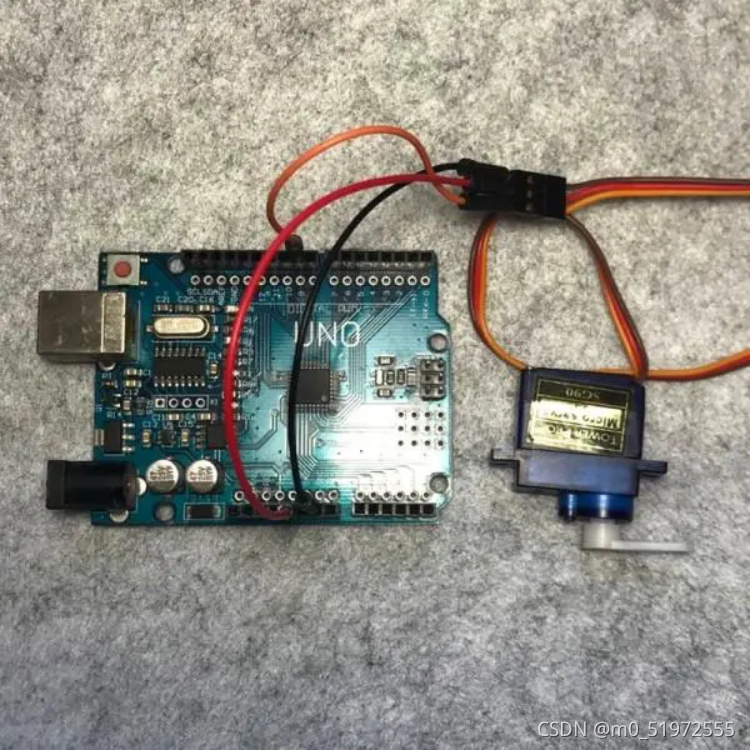
舵机三根线的接法:黄线接信号线,红线接vcc,褐色线接GND 舵机控制原理:通过控制PWM来控制舵机转动的角度,关于PWM的知识可以去智能小车专栏进行学习,转动周期设置为20ms,控制高电平的时间来进行舵机转动的角度。
对于1…

单片机PWM舵机控制原理
舵机的控制一般需要一个20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度舵机为例,那么对应的控制关系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms---…

STM32 PWM控制舵机——原理、接线、源程序
STM32——PWM 控制舵机 通用定时输出PWM PWM的工作原理PWM的模式 TIM_OCMode_PWM1 (边沿对齐模式)TIM_OCMode_PWM2(中央对齐模式) 占空比 舵机 实物图接线舵机工作原理周期TPWM占空比 TIM3 PWM输出 驱动SG90电机 配置过程…
pwm波控制舵机原理(转)
文章转自:http://www.geek-workshop.com/thread-70-1-1.html
一、关于舵机:
舵机(英文叫Servo):它由直流电机、减速齿轮组、传感器和控制电路组成的一套自动控制系统。通过发送信号,指定输出轴旋转角度。…
pwm信号控制舵机的简单原理
pwm信号控制舵机的简单原理 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后&…

SG90舵机的原理和控制方式
前言
做过机器人、智能车或者玩航模的朋友应该对舵机不会陌生,这种舵机也是很常用的。
舵机只是我们通俗的叫法,它的本质是一个伺服电机,也可以叫做位置(角度)伺服驱动器。一般被应用在那些需要控制角度变化的系统中,可以方便的…
舵机控制原理/舵机内部电路原理
舵机结构 舵机是我们常用到的末端执行器,但是在应用时我们只知道利用一定频率和周期的PWM来控制其摆动一定角度。及控制器给舵机一个周期为20ms的PWM波,高电平时间为0.5ms时对应0,高电平时间为2.5ms时对应180。以上规律适用于大多数180摆角的…


python求矩阵的谱半径
在学习计算方法的时候,线性方程组的迭代法中的雅可比(Jacobi)迭代法和高斯-塞德尔(Gauss-Seidel)迭代法的收敛条件中需要求矩阵的谱半径,而经过查阅资料,python numpy库中没有直接求谱半径的函数。 谱半径的定义为: 设A是n n矩阵…

实对称阵的谱半径是连续函数
矩阵的诱导范数(算子范数)的定义: ∣ ∣ A ∣ ∣ sup ∣ ∣ x ∣ ∣ 1 ∣ ∣ A x ∣ ∣ ||A|| \sup_{||x|| 1}||Ax|| ∣∣A∣∣∣∣x∣∣1sup∣∣Ax∣∣其中,||||可以是任何向量范数,由于该矩阵范数是由向量范…

PTA 1063 计算谱半径(Python3)
在数学中,矩阵的“谱半径”是指其特征值的模集合的上确界。换言之,对于给定的 n 个复数空间的特征值 { a1b1i,⋯,anbni },它们的模为实部与虚部的平方和的开方,而“谱半径”就是最大模。
现在给定一些复数空间的特征值&a…

1063 计算谱半径
问题描述: 在数学中,矩阵的“谱半径”是指其特征值的模集合的上确界。换言之,对于给定的 n 个复数空间的特征值 { a1b1i,⋯,anbni },它们的模为实部与虚部的平方和的开方,而“谱半径”就是最大…

如何判断矩阵的谱半径 C语言,矩阵谱半径
矩阵谱半径指的是矩阵的最大特征值(含绝对值)。 它可以判断收敛性,也可以判断方程解的稳定性。 一般情况下,当存在一个单位矩阵减去另外一个矩阵的形式时, 谱半径小于一就是为了确保它们之间的差值为正这样逆矩阵才会存在,可以用来验证一个方案是否可行。 The radius of t…

一、向量范数、矩阵范数、谱半径、条件数
一、范数、条件数与谱半径
1. 范数
1.1 向量范数 向量范数的具体形式可以有很多种(满足上述三个条件的),但常用的有以下三种 设 向 量 x ( ξ 1 , ξ 2 , … , ξ n ) T ∈ C n , 设向量 x\left(\xi_{1}, \xi_{2}, \dots, \xi_{n}\right)^{T} \in C^{n} , 设向量…

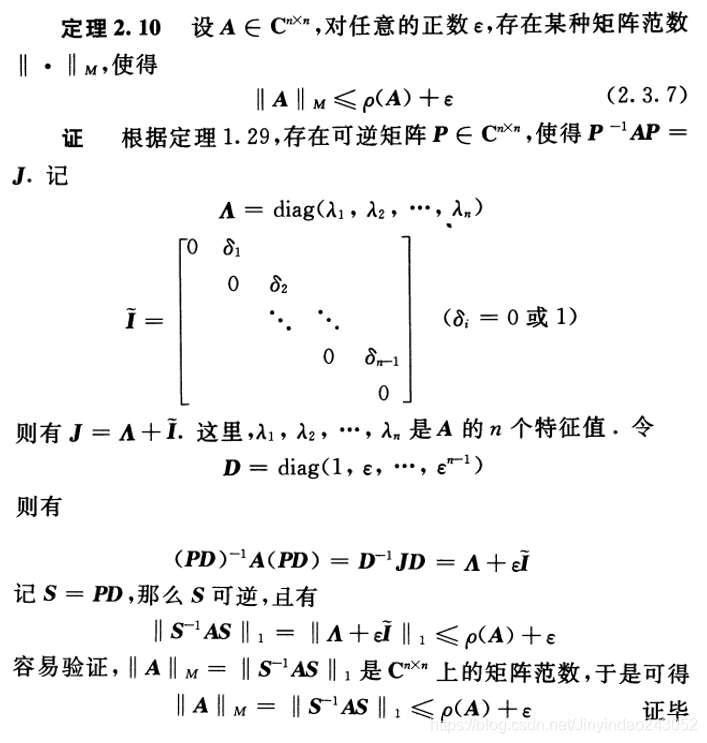
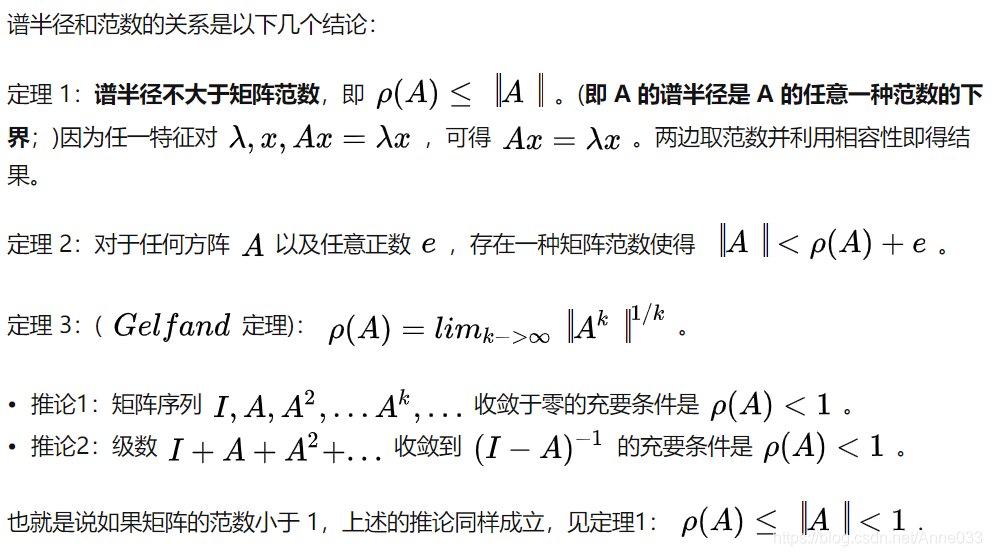
【高等工程数学】南理工研究生课程 突击笔记2 谱半径,条件数
高等工程数学 突击笔记2 文章目录 高等工程数学 突击笔记2写在前面一、谱半径什么是正规矩阵矩阵级数敛散性判断 二、条件数举个栗子条件数求误差总结 写在前面
提示:这里可以添加本文要记录的大概内容:
本文主要是为了应付考试,因此很多原…