2.6 FLAASH大气校正
FLAASH是基于MODTRAN4+辐射传输模型,MODTRAN模型是由进行大气校正算法研究的领先者SpectralSpectral Sciences, Inc和美国空军实验室(Air Force Research Laboratory)共同研发。Exelis
1.
l
l
l
l
l
2.
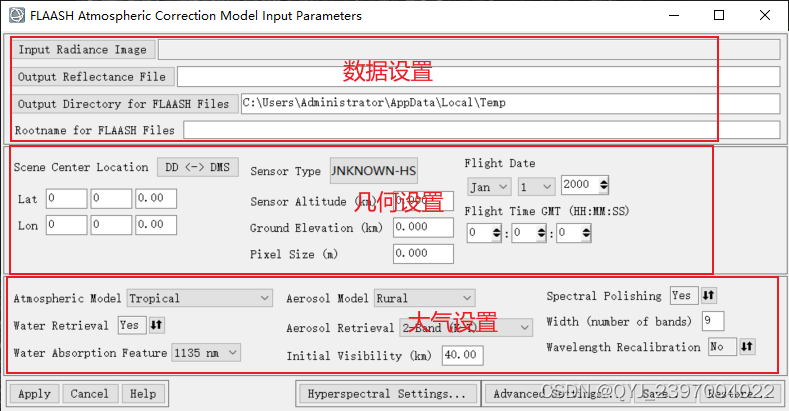
ENVI大气校正模块的使用主要又以下7个方面组成:1、输入文件准备,2、基本参数设置,3、多光谱数据参数设置,4、高光谱数据参数设置,5、高级设置,6、输出文件,7、处理结果。下面介绍这7个方面内容。
(一)
1)
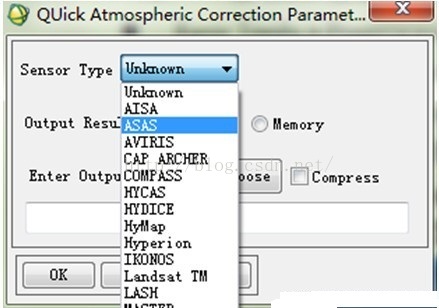
高光谱包括:HyMAP、AVIRIS、CASI、HYDICE、HYPERION(EO-1)、AISA等;多光谱包括:ASTER,AVHRR,GeoEye-1,IKONOS,IRS,Landsat,MODIS,SeaWiFS,SPOT,QuickBird,RapidEye等,
航空:860nm-1135nm波长范围
2)
3)
4)
支持四种数据类型:浮点型(floating)、长整型(long integer )、整型(integer)和无符号整型(unsigned int)。数据存储类型:ENVI标准栅格格式文件,且是BIP或者BIL。
5)
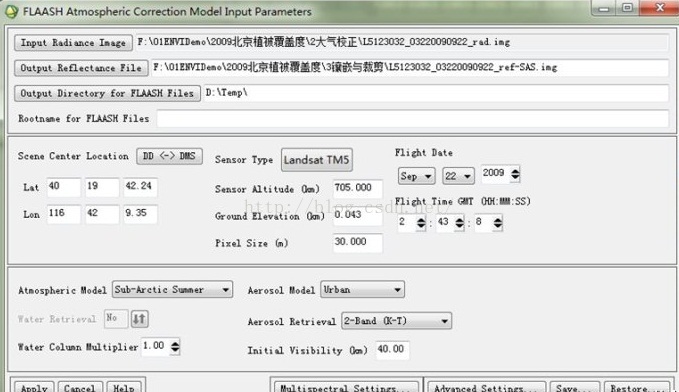
(二)
1)
2)
选择传感器类型,成像中心点经纬度,成像时间,高度信息(成像区域和传感器飞行高度),传感器这些都可以在数据自带信息文件里获得,需要注意的是南半球和西半球要用负值。
3)
提供6种大气模型,如表2所示,可根据纬度和成像季节对照表3查找对应的大气模型。
| Model Atmosphere | Water Vapor (std atm-cm) | Surface Air Temperature | |
| 518 | -16 °C or 3 °F | ||
| 1060 | -1 °C or 30 °F | ||
| 1762 | 15 °C or 59 ° | ||
| 2589 | 14 °C or 57 ° | ||
| 3636 | 21 °C or 70 ° | ||
| 5119 |
| Latitude (°N) | Jan. | May | Sept. | |||
| 80 | SAW | MLW | SAW | |||
| SAW | MLW | MLW | ||||
| 60 | MLW | SAS | MLW | |||
| MLW | SAS | SAS | ||||
| 40 | SAS | MLS | SAS | |||
| MLS | MLS | T | ||||
| 20 | T | T | T | |||
| T | T | T | ||||
| 0 | T | T | T | |||
| T | T | T | ||||
| -20 | T | MLS | T | |||
| MLS | MLS | MLS | ||||
| -40 | SAS | SAS | SAS | |||
| SAS | SAS | MLW | ||||
| -60 | MLW | MLW | MLW | |||
| MLW | MLW | MLW | ||||
| -80 | MLW | SAW |
表3数据经纬度与获取时间对应的大气模型
4)
水气反演设置,采用两种方式对水气进行反演:
a)
使用水气反演模型,数据必须具有15nm以上波谱分辨率,且至少覆盖以下波谱范围之一:
l
l
l
对于大多数多光谱传感器,水气反演默认显示的是NO,因为大多数传感器没有适当的波段来补偿水气的影响。
b)
对于多光谱数据使用水气反演模型,可以在多光谱设置中手动设置水气波段
5)
a)
Rural(乡村)、Urban(城市)、Maritime(海洋)、Tropospheric(对流层,能见度在40km以上)
b)
2-Band(K-T)方法(类似模糊减少法),如果没有找到适应的黑值(一般是阴影区或者水体),系统将采用能见度值来计算;所以即使选择了该选项也要给能见度。
选择None,采用能见度值参与气溶胶反演,能见度值大约参考值参见表4
表4天气条件与能见度对照表
6)
对高光谱数据的光谱进行打磨处理,对波谱曲线进行微调,使波谱曲线更加近似于真实地物的波谱曲线。
7)
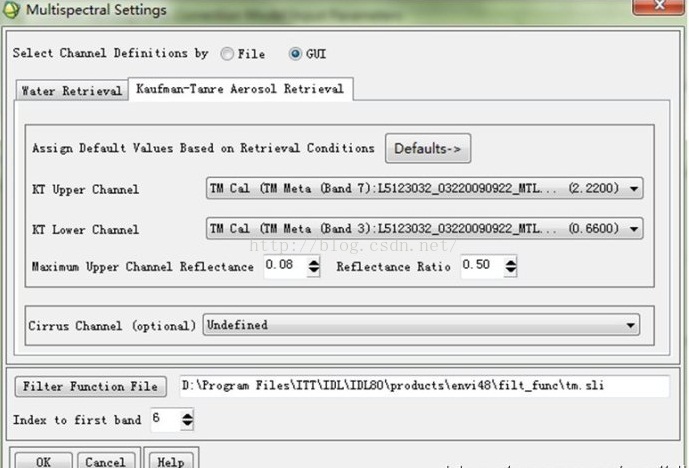
(三)
1)
| Water Retrieval | 1135 nm | 1117 - 1143 nm | |
| 1184 - 1210 nm | |||
| 1050 - 1067 nm | |||
| absorption | |||
| reference upper wing | |||
| reference lower wing | |||
| 820 nm | 810 - 830 nm | ||
| 850 - 870 nm | |||
| 770 - 790 nm | |||
| KT upper | |||
| KT lower | |||
| Cloud Masking | |||
表5推荐使用波长与波段对应关系
2)
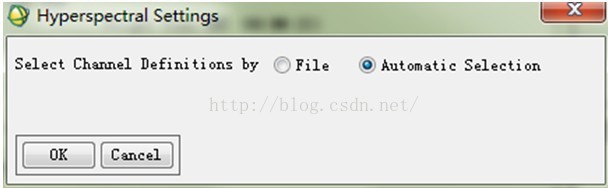
(四)
3)
4)
(五)
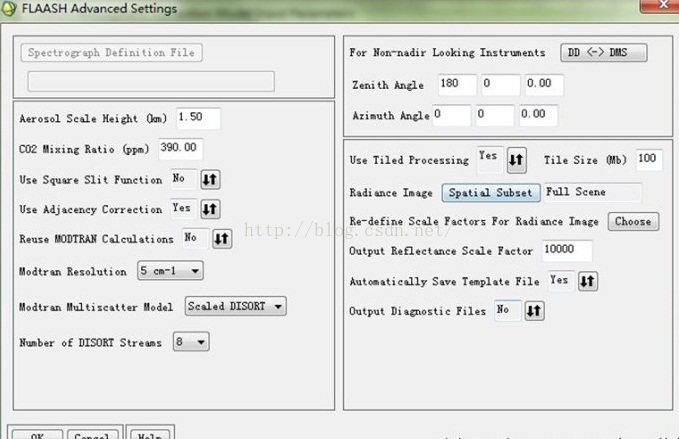
图9高级参数设置
在高级设置面板里可以设置以下几个参数:
1)
2)
3)
4)
5)
6)
7)
提供三种模型供选择Isaacs,DISORT和Scaled DISORT。默认是Scaled DISORT和streams为8,这种模型对于小于1000nm具有较高的精度;
8)
9)
(六)
经过大气校正模块处理,可以得到以下结果:
l
l
l
l
l
(七)
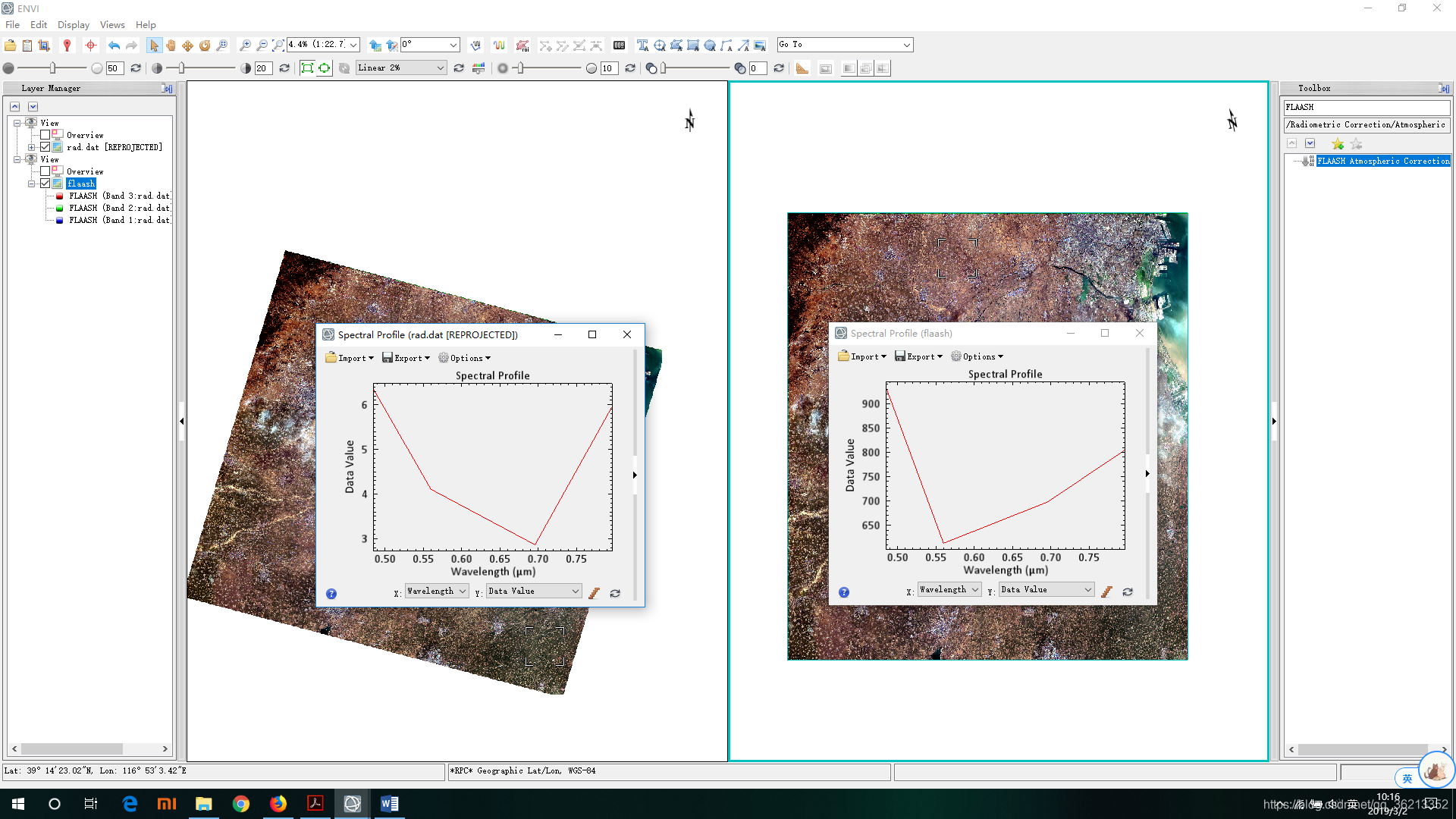
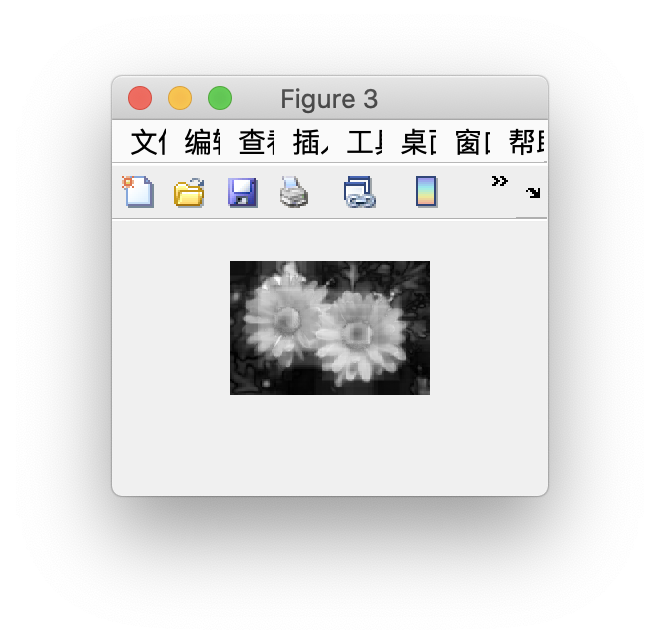
此模块的波谱还原精度高,使用大气校正模块进行大气校正,能高保真地恢复地物波谱信息。
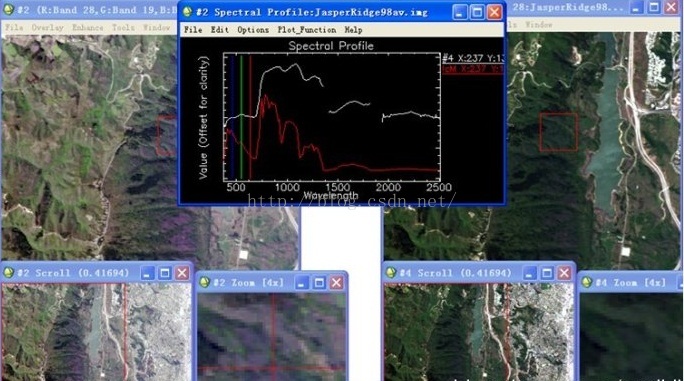
图10校正前后效果图
3.
2、在做modis数据时候,不能使用领域纠正(Use Adjacency Correction)。
3、当数据有地理坐标时候,像元大小要也参数中设置保持一致。如你tm数据是25米的,那么选择Landsat时候,像元大小默认是30米,这个时候如果改成25米会报错。
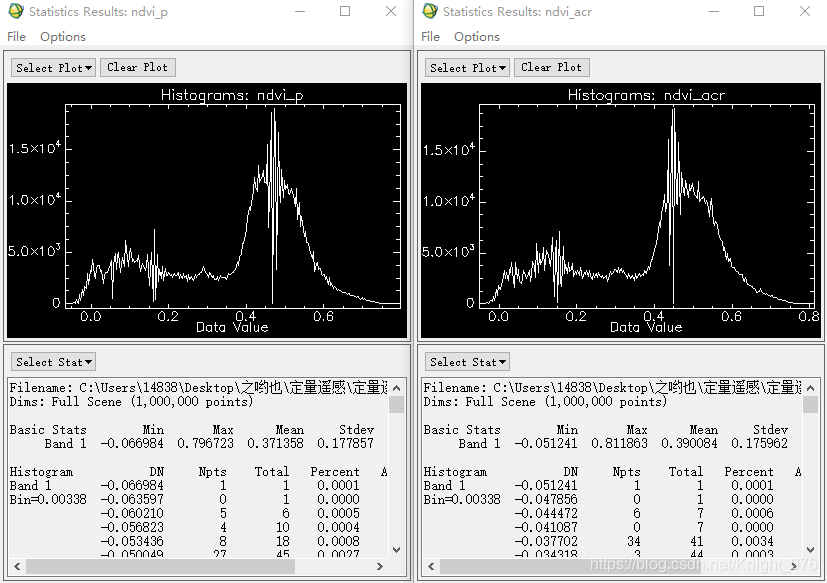
4、得到的结果有负值,这个不好解释,可以理解为误差或者其他因素。或者对太阳光强吸收区域,如水体。
更多错误详细参考:http://blog.sina.com.cn/s/blog_764b1e9d0100pvrk.html