目录
- 理论知识
- 代码步骤
- 读取图像
- 得到金字塔图像
- 提取底层特征
- 计算显著图
- 显著图综合
- 运行结果展示
理论知识
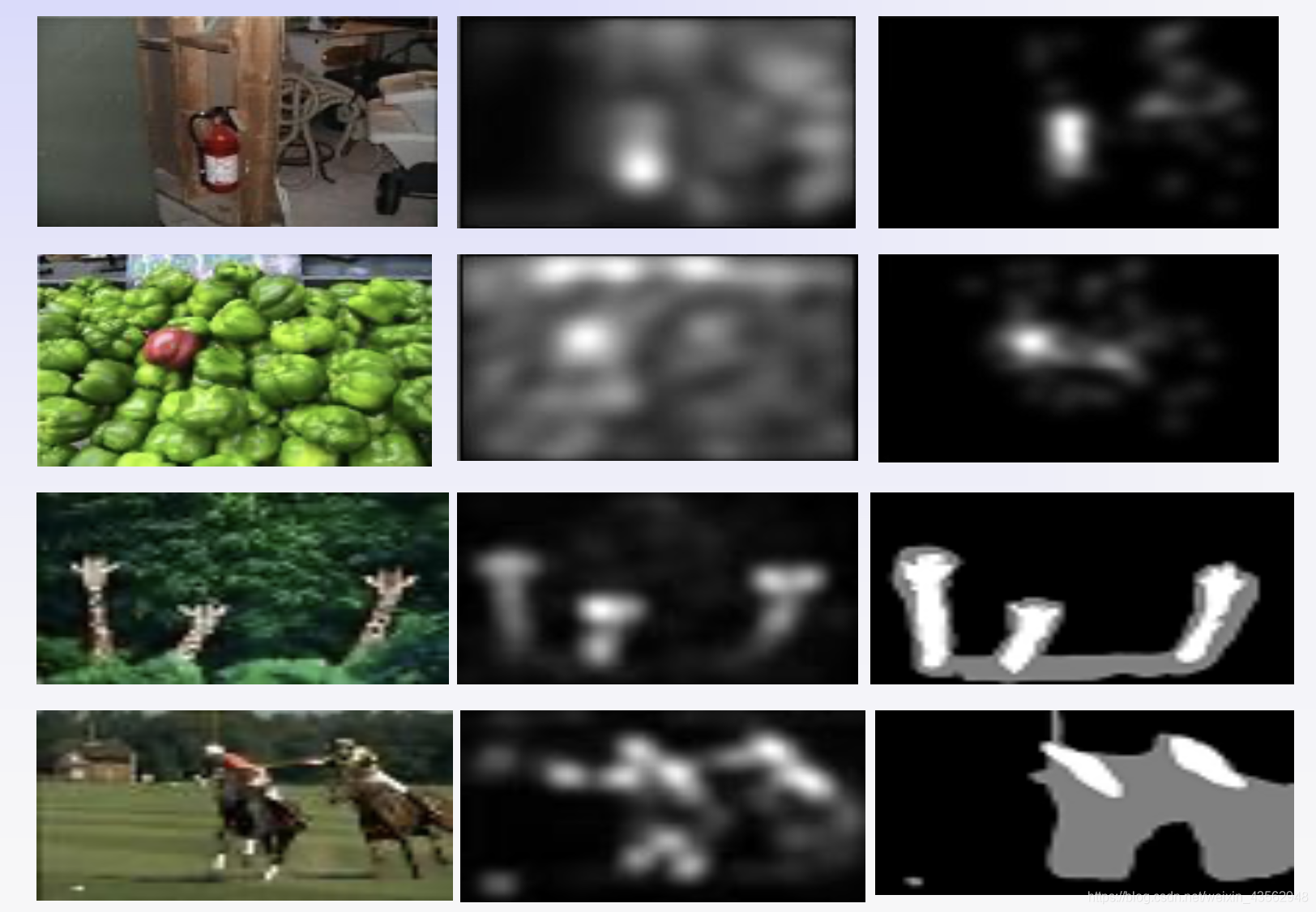
显著性检测 是指按照人类的视觉注意机制,判断出图像中的显著区域,并为该区域分配较高的显著值,通常认为显著区域更有可能包含目标,利用显著性检测的方法能够快速在图像中找到可能的目标区域,可以减少计算量。显著性检测主要是提取底层视觉特征来计算局部区域的差异性。
Itti模型是一种经典的自底向上基于底层显著特征计算的显著性检测模型,其实现过程大致分为高斯滤波、计算底层空间特征图和计算显著性图,结构如下图所示
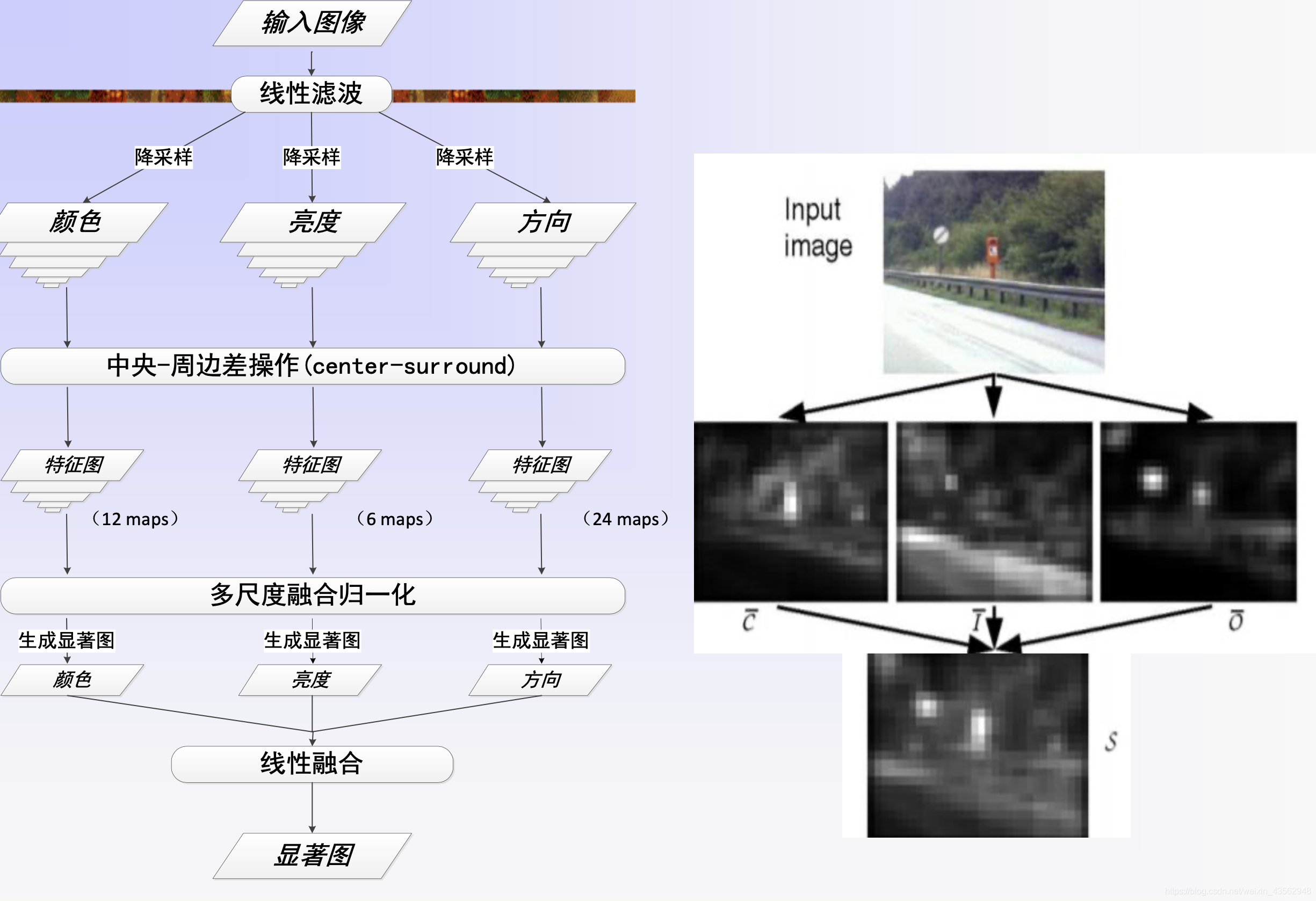
篇幅原因,详细原理可以参考Itti算法
代码步骤
全部代码:github链接
读取图像
读取图像后,将其转化为double类型。
img1=im2double(img1);
得到金字塔图像
一共是九层金字塔,除去原图外,还需要八层。
%得到金字塔图像
w=fspecial('gaussian',[3 3]);
img2=imresize(imfilter(img1,w),[m/2 n/2]);
img3=imresize(imfilter(img2,w),[m/4 n/4]);
img4=imresize(imfilter(img3,w),[m/8 n/8]);
img5=imresize(imfilter(img4,w),[m/16 n/16]);
img6=imresize(imfilter(img5,w),[m/32 n/32]);
img7=imresize(imfilter(img6,w),[m/64 n/64]);
img8=imresize(imfilter(img7,w),[m/128 n/128]);
img9=imresize(imfilter(img8,w),[m/256 n/256]);
提取底层特征
分别提取亮度金字塔、色度金字塔、方向特征金字塔。
定义亮度金字塔提取函数
function I=extract_Ifeature(img)
% 输入:待提取图像
% 输出:亮度特征图
I=(img(:,:,1)+img(:,:,2)+img(:,:,3))./3;
定义色度金字塔提取函数,红绿蓝三个特征,以红色为例
function R=extract_Rfeature(img)
% 输入:待提取图像
% 输出:红色R特征
R=img(:,:,1)-((img(:,:,2)+img(:,:,3))./2);
%亮度金字塔
I1=extract_Ifeature(img1);
I2=extract_Ifeature(img2);
I3=extract_Ifeature(img3);
I4=extract_Ifeature(img4);
I5=extract_Ifeature(img5);
I6=extract_Ifeature(img6);
I7=extract_Ifeature(img7);
I8=extract_Ifeature(img8);
I9=extract_Ifeature(img9);
% figure,
% imshow(I2);%色度金字塔
%红色特征
R1=extract_Rfeature(img1);
R2=extract_Rfeature(img2);
R3=extract_Rfeature(img3);
R4=extract_Rfeature(img4);
R5=extract_Rfeature(img5);
R6=extract_Rfeature(img6);
R7=extract_Rfeature(img7);
R8=extract_Rfeature(img8);
R9=extract_Rfeature(img9);
% figure,
% imshow(R1);%绿色特征
G1=extract_Gfeature(img1);
G2=extract_Gfeature(img2);
G3=extract_Gfeature(img3);
G4=extract_Gfeature(img4);
G5=extract_Gfeature(img5);
G6=extract_Gfeature(img6);
G7=extract_Gfeature(img7);
G8=extract_Gfeature(img8);
G9=extract_Gfeature(img9);
% figure,
% imshow(G1);%蓝色特征
B1=extract_Bfeature(img1);
B2=extract_Bfeature(img2);
B3=extract_Bfeature(img3);
B4=extract_Bfeature(img4);
B5=extract_Bfeature(img5);
B6=extract_Bfeature(img6);
B7=extract_Bfeature(img7);
B8=extract_Bfeature(img8);
B9=extract_Bfeature(img9);
% figure,
% imshow(B1);%黄色特征
Y1=extract_Yfeature(img1);
Y2=extract_Yfeature(img2);
Y3=extract_Yfeature(img3);
Y4=extract_Yfeature(img4);
Y5=extract_Yfeature(img5);
Y6=extract_Yfeature(img6);
Y7=extract_Yfeature(img7);
Y8=extract_Yfeature(img8);
Y9=extract_Yfeature(img9);
% figure,
%imshow(Y1);
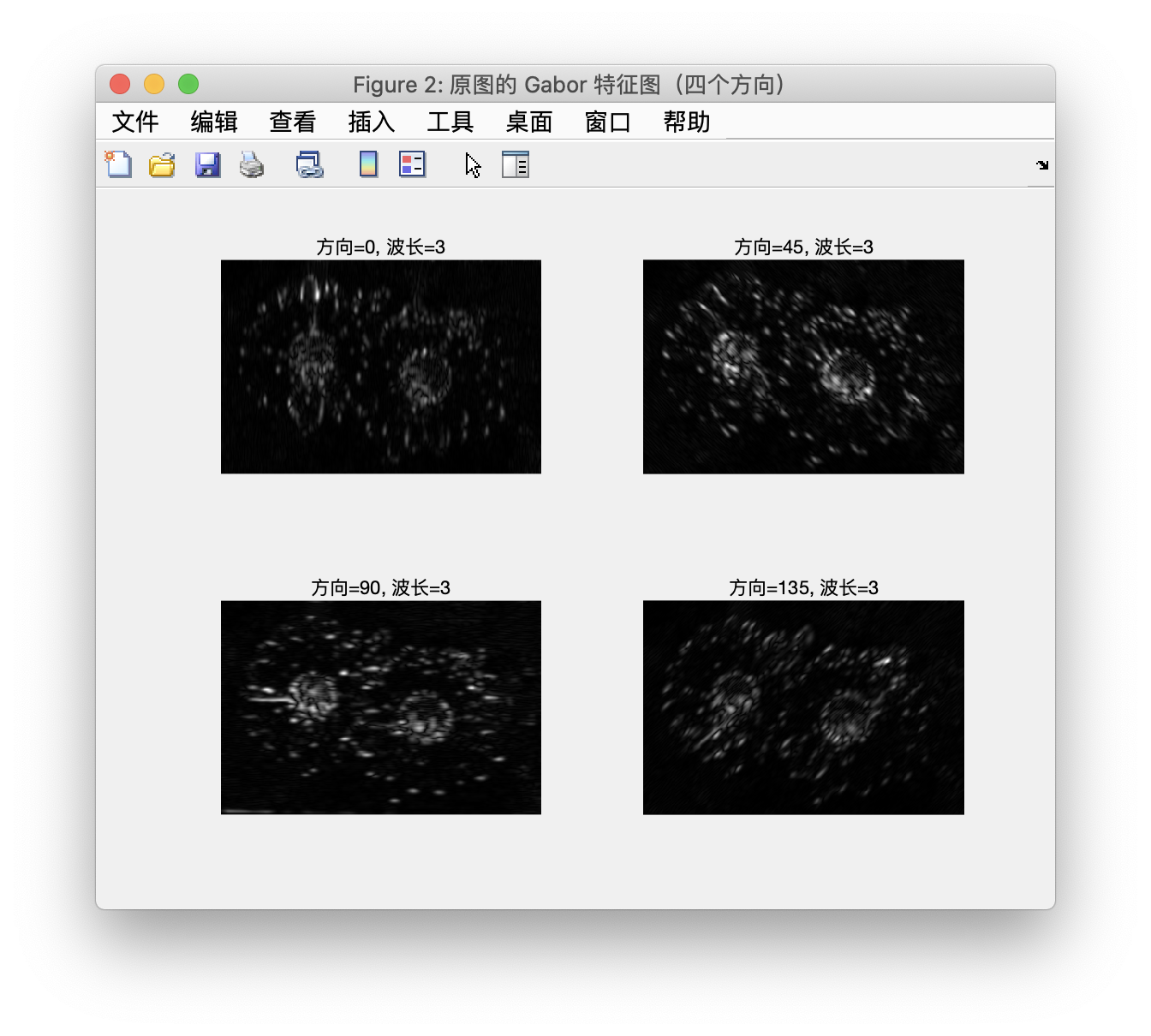
提取方向特征,使用Matlab自带的gabor滤波器
%方向特征
%使用内置gabor滤波器
gaborArray = gabor(3,[0 45 90 135]);%滤波器数组,波长为10,四个方向
img1_gaborMag=imgaborfilt(rgb2gray(img1),gaborArray);%结果包含四个方向的特征图,在第三维度
img2_gaborMag=imgaborfilt(rgb2gray(img2),gaborArray);
img3_gaborMag=imgaborfilt(rgb2gray(img3),gaborArray);
img4_gaborMag=imgaborfilt(rgb2gray(img4),gaborArray);
img5_gaborMag=imgaborfilt(rgb2gray(img5),gaborArray);
img6_gaborMag=imgaborfilt(rgb2gray(img6),gaborArray);
img7_gaborMag=imgaborfilt(rgb2gray(img7),gaborArray);
img8_gaborMag=imgaborfilt(rgb2gray(img8),gaborArray);
img9_gaborMag=imgaborfilt(rgb2gray(img9),gaborArray);
figure('Name',"原图的 Gabor 特征图(四个方向)")
for i=1:4subplot(2,2,i),imshow(img1_gaborMag(:,:,i),[]);theta = gaborArray(i).Orientation;lambda = gaborArray(i).Wavelength;title(sprintf('方向=%d, 波长=%d',theta,lambda));
end
计算显著图
根据公式计算显著图,这里分辨率不同的特征图合并时以函数中最大的分辨率为标准。
定义亮度特征取差函数
function I_cs=Ifeature_diff(I1,I2)
% 输入:I1为高分辨率图像,I2为低分辨率图像
% 输出:亮度特征取差结果
[m,n]=size(I1);
I2=imresize(I2,[m,n],'nearest');
I_cs=abs(double(I1)-double(I2));
定义色度特征取差函数
function RGBY=RGBfeature_diff(Rc,Gc,Rs,Gs)
%输入:高分辨率图像红色、绿色特征图,低分辨率图像红色、绿色特征图
%输出:红绿特征取差结果
[m,n]=size(Rc);
Rs=imresize(Rs,[m,n],'nearest');
Gs=imresize(Gs,[m,n],'nearest');
RGBY=abs((double(Rc)-double(Gc))-(double(Gs)-double(Rs)));
定义方向特征取差函数
function ocs=directionfeature_diff(oc,os)
[m,n]=size(oc);
os=imresize(os,[m,n],'nearest');
ocs=abs(oc-os);
%%
%%计算显著图,分辨率以函数中最大的分辨率为标准
%亮度特征取差
I_2_5=double(Ifeature_diff(I2,I5));
I_2_6=double(Ifeature_diff(I2,I6));
I_3_6=double(Ifeature_diff(I3,I6));
I_3_7=double(Ifeature_diff(I3,I7));
I_4_7=double(Ifeature_diff(I4,I7));
I_4_8=double(Ifeature_diff(I4,I8));%色度特征取差
%RG
RG_2_5=double(RGBfeature_diff(R2,G2,R5,G5));
RG_2_6=double(RGBfeature_diff(R2,G2,R6,G6));
RG_3_6=double(RGBfeature_diff(R3,G3,R6,G6));
RG_3_7=double(RGBfeature_diff(R3,G3,R7,G7));
RG_4_7=double(RGBfeature_diff(R4,G4,R7,G7));
RG_4_8=double(RGBfeature_diff(R4,G4,R8,G8));%BY
BY_2_5=double(RGBfeature_diff(B2,B2,Y5,Y5));
BY_2_6=double(RGBfeature_diff(B2,B2,Y6,Y6));
BY_3_6=double(RGBfeature_diff(B3,B3,Y6,Y6));
BY_3_7=double(RGBfeature_diff(B3,B3,Y7,Y7));
BY_4_7=double(RGBfeature_diff(B4,B4,Y7,Y7));
BY_4_8=double(RGBfeature_diff(B4,B4,Y8,Y8));%方向特征取差
%0度
O_2_5_0=double(directionfeature_diff(img2_gaborMag(:,:,1),img5_gaborMag(:,:,1)));
O_2_6_0=double(directionfeature_diff(img2_gaborMag(:,:,1),img6_gaborMag(:,:,1)));
O_3_6_0=double(directionfeature_diff(img3_gaborMag(:,:,1),img6_gaborMag(:,:,1)));
O_3_7_0=double(directionfeature_diff(img3_gaborMag(:,:,1),img7_gaborMag(:,:,1)));
O_4_7_0=double(directionfeature_diff(img4_gaborMag(:,:,1),img7_gaborMag(:,:,1)));
O_4_8_0=double(directionfeature_diff(img4_gaborMag(:,:,1),img8_gaborMag(:,:,1)));%45度
O_2_5_45=double(directionfeature_diff(img2_gaborMag(:,:,2),img5_gaborMag(:,:,2)));
O_2_6_45=double(directionfeature_diff(img2_gaborMag(:,:,2),img6_gaborMag(:,:,2)));
O_3_6_45=double(directionfeature_diff(img3_gaborMag(:,:,2),img6_gaborMag(:,:,2)));
O_3_7_45=double(directionfeature_diff(img3_gaborMag(:,:,2),img7_gaborMag(:,:,2)));
O_4_7_45=double(directionfeature_diff(img4_gaborMag(:,:,2),img7_gaborMag(:,:,2)));
O_4_8_45=double(directionfeature_diff(img4_gaborMag(:,:,2),img8_gaborMag(:,:,2)));%90度
O_2_5_90=double(directionfeature_diff(img2_gaborMag(:,:,3),img5_gaborMag(:,:,3)));
O_2_6_90=double(directionfeature_diff(img2_gaborMag(:,:,3),img6_gaborMag(:,:,3)));
O_3_6_90=double(directionfeature_diff(img3_gaborMag(:,:,3),img6_gaborMag(:,:,3)));
O_3_7_90=double(directionfeature_diff(img3_gaborMag(:,:,3),img7_gaborMag(:,:,3)));
O_4_7_90=double(directionfeature_diff(img4_gaborMag(:,:,3),img7_gaborMag(:,:,3)));
O_4_8_90=double(directionfeature_diff(img4_gaborMag(:,:,3),img8_gaborMag(:,:,3)));%135度
O_2_5_135=double(directionfeature_diff(img2_gaborMag(:,:,4),img5_gaborMag(:,:,4)));
O_2_6_135=double(directionfeature_diff(img2_gaborMag(:,:,4),img6_gaborMag(:,:,4)));
O_3_6_135=double(directionfeature_diff(img3_gaborMag(:,:,4),img6_gaborMag(:,:,4)));
O_3_7_135=double(directionfeature_diff(img3_gaborMag(:,:,4),img7_gaborMag(:,:,4)));
O_4_7_135=double(directionfeature_diff(img4_gaborMag(:,:,4),img7_gaborMag(:,:,4)));
O_4_8_135=double(directionfeature_diff(img4_gaborMag(:,:,4),img8_gaborMag(:,:,4)));
显著图综合
定义归一化函数,归一化函数很关键
function img1 = normalizeImg(img)
%输入:待归一化特征图
%输出:归一化特征图
[r,c]=size(img);
m = 0;%动态存储局部最小值
M=1;%全局最大值img = mat2gray(img);%全局最大值M归一化,并且数值类型转化为double%寻找局部最大值
step=16;%搜索步长
for i=1:step:r-stepfor j=1:step:c-steptempImg=img(i:i+step-1,j:j+step-1);%取块m=[m,max(max(tempImg))];end
end%取平均值
[~,cc]=size(m);
sum=0;
for i=1:ccsum=sum+m(i);
end
m_=sum/cc;
img1=img+((M-m_)^2);
%%综合显著图
%归一化图像
I_2_5=normalizeImg(I_2_5);
I_2_6=normalizeImg(I_2_6);
I_3_6=normalizeImg(I_3_6);
I_3_7=normalizeImg(I_3_7);
I_4_7=normalizeImg(I_4_7);
I_4_8=normalizeImg(I_4_8);RG_2_5=normalizeImg(RG_2_5);
RG_2_6=normalizeImg(RG_2_6);
RG_3_6=normalizeImg(RG_3_6);
RG_3_7=normalizeImg(RG_3_7);
RG_4_7=normalizeImg(RG_4_7);
RG_4_8=normalizeImg(RG_4_8);BY_2_5=normalizeImg(BY_2_5);
BY_2_6=normalizeImg(BY_2_6);
BY_3_6=normalizeImg(BY_3_6);
BY_3_7=normalizeImg(BY_3_7);
BY_4_7=normalizeImg(BY_4_7);
BY_4_8=normalizeImg(BY_4_8);O_2_5_0=normalizeImg(O_2_5_0);
O_2_6_0=normalizeImg(O_2_6_0);
O_3_6_0=normalizeImg(O_3_6_0);
O_3_7_0=normalizeImg(O_3_7_0);
O_4_7_0=normalizeImg(O_4_7_0);
O_4_8_0=normalizeImg(O_4_8_0);O_2_5_45=normalizeImg(O_2_5_45);
O_2_6_45=normalizeImg(O_2_6_45);
O_3_6_45=normalizeImg(O_3_6_45);
O_3_7_45=normalizeImg(O_3_7_45);
O_4_7_45=normalizeImg(O_4_7_45);
O_4_8_45=normalizeImg(O_4_8_45);O_2_5_90=normalizeImg(O_2_5_90);
O_2_6_90=normalizeImg(O_2_6_90);
O_3_6_90=normalizeImg(O_3_6_90);
O_3_7_90=normalizeImg(O_3_7_90);
O_4_7_90=normalizeImg(O_4_7_90);
O_4_8_90=normalizeImg(O_4_8_90);O_2_5_135=normalizeImg(O_2_5_135);
O_2_6_135=normalizeImg(O_2_6_135);
O_3_6_135=normalizeImg(O_3_6_135);
O_3_7_135=normalizeImg(O_3_7_135);
O_4_7_135=normalizeImg(O_4_7_135);
O_4_8_135=normalizeImg(O_4_8_135);%综合计算
%亮度
I_c2=I_2_5+I_2_6;
I_c3=I_3_7+I_3_6;
I_c4=I_4_7+I_4_8;I_c3=imresize(I_c3,size(I_c2),'nearest');
I_c4=imresize(I_c4,size(I_c2),'nearest');I=(I_c2+I_c3+I_c4);%色度
c2=RG_2_5+BY_2_5+RG_2_6+BY_2_6;
c3=RG_3_6+BY_3_6+RG_3_7+BY_3_7;
c4=RG_4_7+BY_4_7+RG_4_8+BY_4_8;c3=imresize(c3,size(c2),'nearest');
c4=imresize(c4,size(c2),'nearest');C=(c2+c3+c4);%方向
O2=O_2_5_0+O_2_5_45+O_2_5_90+O_2_5_135+O_2_6_0+O_2_6_45+O_2_6_90+O_2_6_135;
O3=O_3_6_0+O_3_6_45+O_3_6_90+O_3_6_135+O_3_7_0+O_3_7_45+O_3_7_90+O_3_7_135;
O4=O_4_7_0+O_4_7_45+O_4_7_90+O_4_7_135+O_4_8_0+O_4_8_45+O_4_8_90+O_4_8_135;O3=imresize(O3,size(O2),'nearest');
O4=imresize(O4,size(O2),'nearest');O=normalizeImg(O2+O3+O4);S=(double(I)+double(O)+double(C))./3;figure,
imshow(S,[]);
运行结果展示
原图

金字塔图像
方向特征
显著图