*********************************************************************************************
以下内容只用于记录平时上课实习的实习报告,以便将来查阅。
*********************************************************************************************
一、实习目的:
大气校正的目的是消除或减少大气对图像的干扰。本次实习要求熟练掌握辐射定标和大气校正的方法,加深对6S模型原理的理解,掌握6S软件的使用方法与步骤,并利用该软件进行TM影像的大气校正。
二、实习数据
河北黄骅市TM影像
三、实习步骤
3.1 辐射定标
- ENVI中的具体实现:
要对图像进行辐射定标,将图像的DN值转化为表观辐亮度,该过程应用下式实现:
Radiance=gain*DN+offset (1)
以TM图像第3波段的DN值转化为表观反射率为例:
第一步,查找HEADER文件,找到图像每个波段的gain和offset。
3.2 计算表观反射率
由下式计算表观反射率,
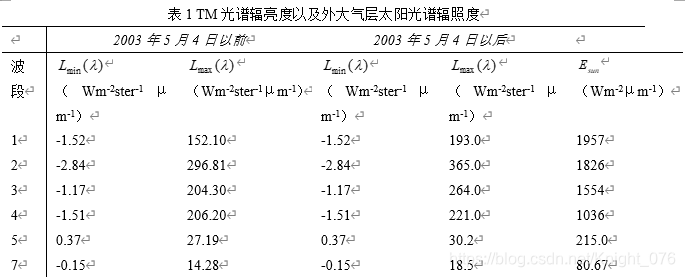
ρ=π*L*d2/(ESUN*cos(θ)) (2)
其中ρ为表观反射率,L为表观辐亮度,d为日地距离,ESUN为太阳平均辐射强度,θ为太阳高度角。
第二步,查找HEADER文件可知=64度;查找表可知 d=1.10109天文单位;查找表1 可知ESUN3=1554。
3.3 6S大气校正
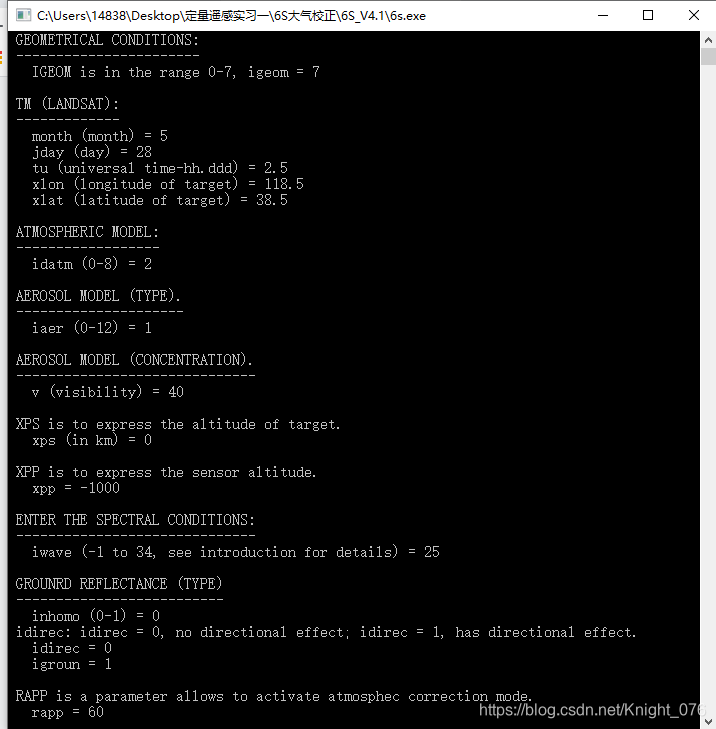
调用6S大气校正模块,进行大气校正。具体输入参数如下:
1.太阳天顶角、卫星天顶角、太阳方位角、卫星方位角,也可以输入卫星轨道与时间参数来替代。
2.大气组分参数,包括水汽、臭氧含量等参数。若缺乏精确的实况数据,可以根据卫星数据的地理位置和时间,选用6S提供的标准模型来替代,比如选取标准大气模型-中纬度冬天和中纬度夏天。
3.气溶胶组分参数,包括水分含量以及烟尘、灰尘等在空气中的百分比等参数。若缺乏精确的实况数据,可以选用6S提供的标准模型来替代,例如用“大陆模型”来描述标准大气的气溶胶组分等。
4.气溶胶的大气路径长度,用能见度参数表示。
5.观测目标的海拔高度及传感器高度。
6.光谱条件,可以直接输入光谱波段范围,也可以将遥感器波段作为输入条件。
7. 若是基于朗伯体大气校正,直接输入象元的光谱值可得到经过朗伯体大气校正后的地面反射率;
然后利用6S模型计算出的6个波段的系数XA,XB,XC进行大气校正。(输入参数如下)
输入完参数后,系统会自动生成一个six.out文件,用记事本打开即可在里面查找xa,xb,xc的相关信息。其中参数“25”代表band1波段,可以查阅中文手册对比,26——band2,27——band3...
| coefficients | xa | xb | xc |
| band1 | 0.00243 | 0.09788 | 0.15913 |
| band2 | 0.00253 | 0.05509 | 0.10901 |
| band3 | 0.00279 | 0.03178 | 0.07839 |
| band4 | 0.00407 | 0.0153 | 0.04726 |
| band5 | 0.01946 | 0.00275 | 0.01292 |
| band7 | 0.05233 | 0.00113 | 0.00665 |
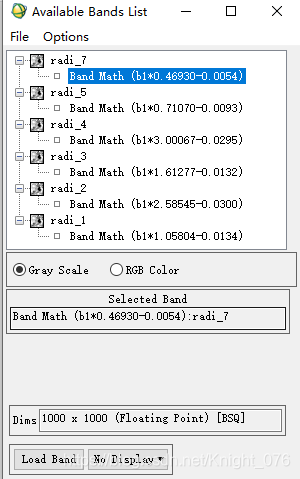
之后带入到envi中利用band math 工具计算大气校正反射率acr。*利用给定:y=xa*(measured radiance)-xb; acr=y/(1.+xc*y) 。
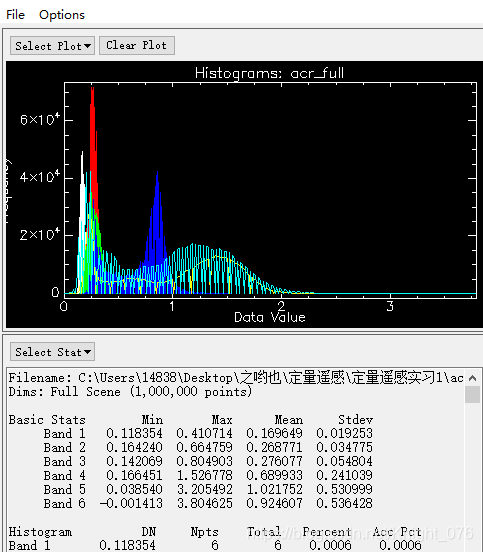
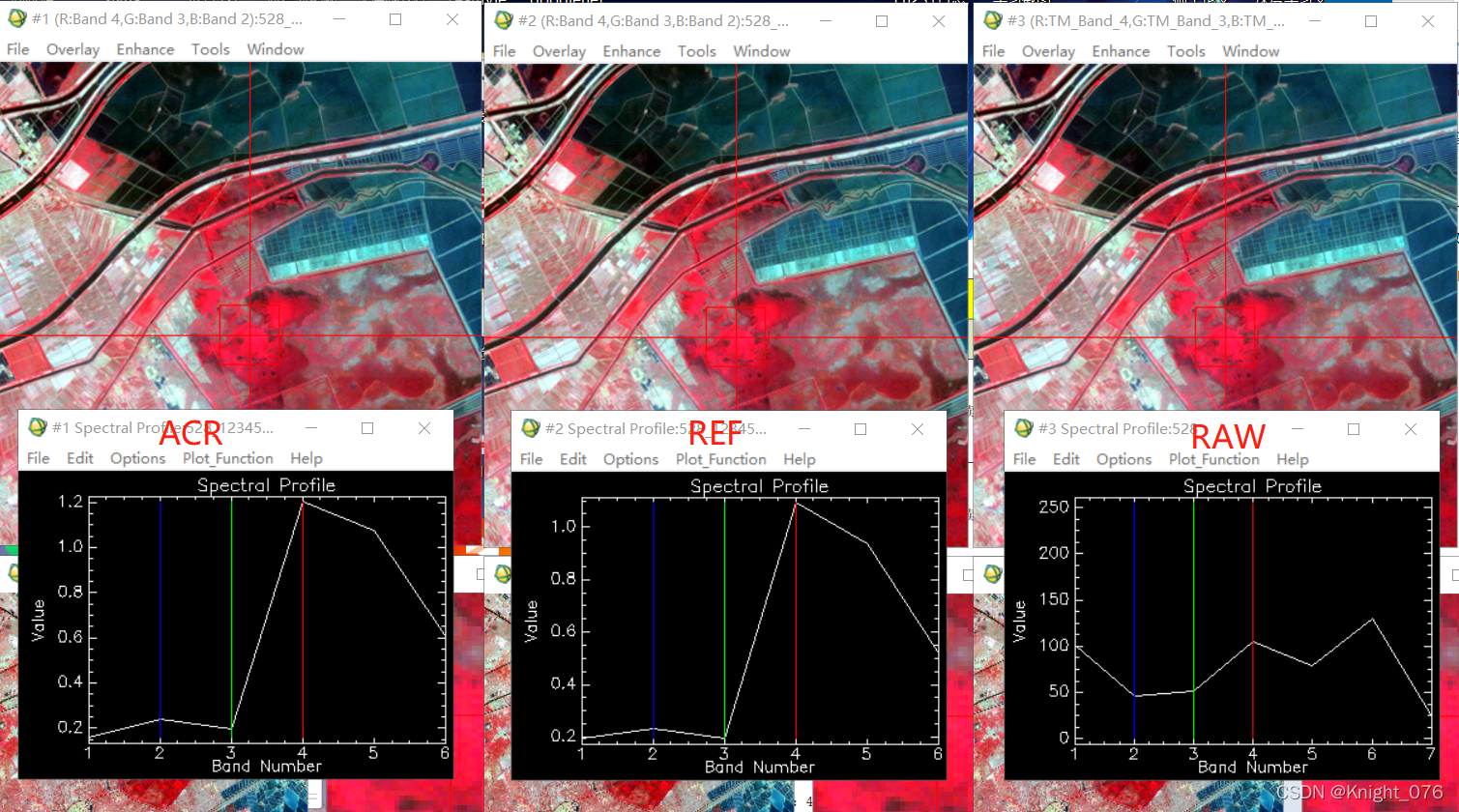
如下图所示,对比6S大气校正反射率acr, 表观反射率ref和原始影像raw,可以看出在经过大气校正后,地物波谱特征得到明显增强。
四、实习报告要求
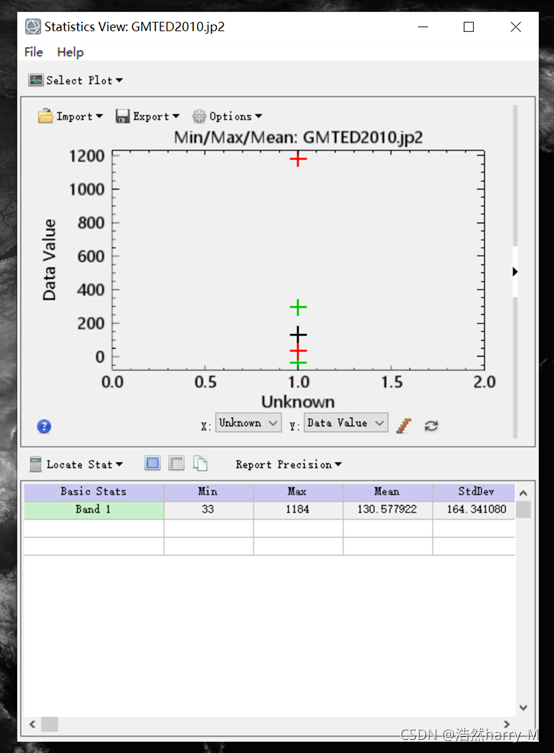
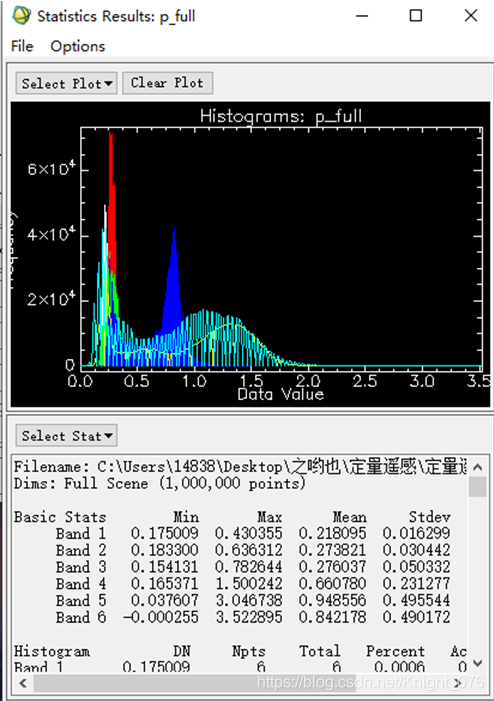
4.1.分别对计算完表观反射率ρ的ndvi值以及6S应用模型大气校正后反射率acr的ndvi值,两者进行比较。
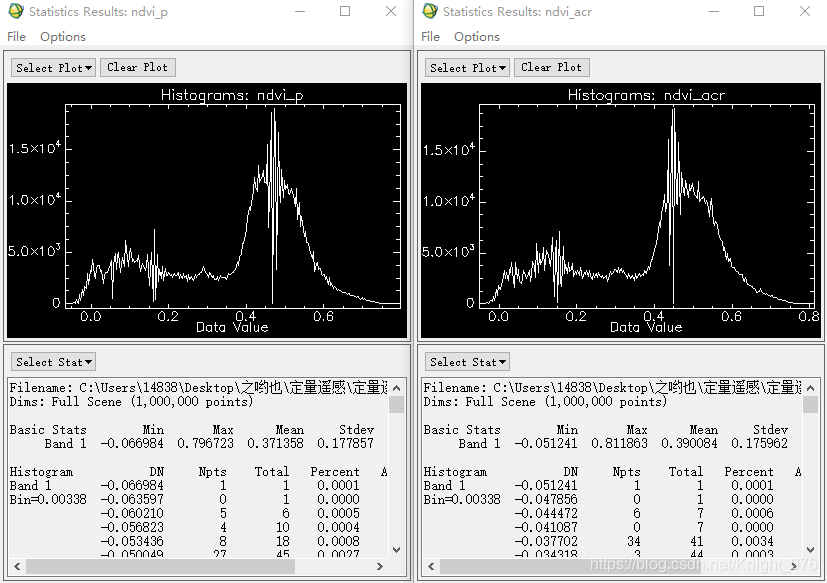
观察其最大值、最小值、均值以及标准差可以发现,两者的ndvi值总体上偏差不大,但在值域的峰值上有一些偏差,如表观反射率ρ的ndvi值在0.46处达到峰值而利用6S模型计算的acr的ndvi值在0.45处达到峰值。