文章目录
- 前言
- 一、平面及其方程
- 平面的点法式方程
- 平面的一般方程
- 平面的截距式方程
- 两平面的夹角
- 点到平面的距离公式
- 二、空间直线及其方程
- 空间直线的一般方程
- 空间直线的对称式方程(点向式方程)
- 空间直线的参数方程
- 两直线的夹角
- 直线与平面的夹角
- 平面束方程
- 三、曲面及其方程
- 旋转曲面
- 旋转单叶双曲面
- 旋转双叶双曲面
- 旋转椭球面
- 柱面
- 抛物柱面
- 椭圆柱面
- 双曲柱面
- 二次曲面
- 椭圆锥面
- 椭球面
- 单叶双曲面
- 双叶双曲面
- 椭圆抛物面
- 双曲抛物面
- 四、空间曲线及其方程
- 空间曲线的一般方程
- 空间曲线的参数方程
- 空间曲线在坐标面上的投影
- 总结
前言
空间解析几何中有平面及其方程、空间直线及其方程、曲面及其方程、空间曲线及其方程,有时候就怀疑这个空间的真实性,高维空间中我们是怎样的存在,害,好像有点杞人忧天了,每天吃好、喝好、睡好、学习搞好就阿弥陀佛了,来进入正题吧。
一、平面及其方程
平面的点法式方程
已知平面上一点 M 0 ( x 0 , y 0 , z 0 ) M_0\left( x_0,y_0,z_0 \right) M0(x0,y0,z0)和平面的一个法向量 n ⃗ = ( A , B , C ) \vec{n}=\left( A,B,C \right) n=(A,B,C)
对于平面上任意一点
M ( x , y , z ) M\left( x,y,z \right) M(x,y,z)
三者满足
n ⃗ ⋅ M 0 M → = 0 \vec{n}\cdot \overrightarrow{M_0M}=0 n⋅M0M=0
点法式方程为
A ( x − x 0 ) + B ( y − y 0 ) + C ( z − z 0 ) = 0 A\left( x-x_0 \right) +B\left( y-y_0 \right) +C\left( z-z_0 \right) =0 A(x−x0)+B(y−y0)+C(z−z0)=0
平面的一般方程
三元一次方程
A x + B y + C z + D = 0 Ax+By+Cz+D=0 Ax+By+Cz+D=0
其图形总是一个平面,称为平面的一般方程
该平面的法向量为
n ⃗ = ( A , B , C ) \vec{n}=\left( A,B,C \right) n=(A,B,C)
通过原点的平面方程: A x + B y + C z = 0 Ax+By+Cz=0 Ax+By+Cz=0
平行于 x x x轴的平面方程: B y + C z + D = 0 By+Cz+D=0 By+Cz+D=0
平行于 y y y轴的平面方程: A x + C z + D = 0 Ax+Cz+D=0 Ax+Cz+D=0
平行于 z z z轴的平面方程: A x + B y + D = 0 Ax+By+D=0 Ax+By+D=0
平行于 x O y xOy xOy平面的平面方程: C z + D = 0 Cz+D=0 Cz+D=0
平行于 y O z yOz yOz平面的平面方程: A x + D = 0 Ax+D=0 Ax+D=0
平行于 x O z xOz xOz平面的平面方程: B y + D = 0 By+D=0 By+D=0
平面的截距式方程
一平面与 x x x轴、 y y y轴、 z z z轴的交点依次为 ( a , 0 , 0 ) 、 Q ( 0 , b , 0 ) 、 R ( 0 , 0 , c ) \left( a,0,0 \right) \text{、}Q\left( 0,b,0 \right) \text{、}R\left( 0,0,c \right) (a,0,0)、Q(0,b,0)、R(0,0,c)
且 a ≠ 0 、 b ≠ 0 、 c ≠ 0 a\ne 0\text{、}b\ne 0\text{、}c\ne 0 a=0、b=0、c=0
截距式方程为
x a + y b + z c = 1 \frac{x}{a}+\frac{y}{b}+\frac{z}{c}=1 ax+by+cz=1
a a a、 b b b、 c c c依次称为平面在 x x x轴、 y y y轴和 z z z轴上的截距
两平面的夹角
平面 Π 1 \varPi _1 Π1和平面 Π 2 \varPi _2 Π2的法向量分别为 n 1 → = ( A 1 , B 1 , C 1 ) \overrightarrow{n_1}=\left( A_1,B_1,C_1 \right) n1=(A1,B1,C1)和 n 2 → = ( A 2 , B 2 , C 2 ) \overrightarrow{n_2}=\left( A_2,B_2,C_2 \right) n2=(A2,B2,C2),两平面的夹角为 θ \theta θ且 0 ≤ θ ≤ π 2 0\le \theta \le \frac{\pi}{2} 0≤θ≤2π
平面 Π 1 \varPi _1 Π1和平面 Π 2 \varPi _2 Π2夹角的余弦为
cos θ = ∣ A 1 A 2 + B 1 B 2 + C 1 C 2 ∣ A 1 2 + B 1 2 + C 1 2 A 2 2 + B 2 2 + C 2 2 \cos \theta =\frac{|A_1A_2+B_1B_2+C_1C_2|}{\sqrt{A_1^2+B_1^2+C_1^2}\sqrt{A_{2}^{2}+B_{2}^{2}+C_{2}^{2}}} cosθ=A12+B12+C12A22+B22+C22∣A1A2+B1B2+C1C2∣
点到平面的距离公式
已知点 P 0 ( x 0 , y 0 , z 0 ) P_0\left( x_0,y_0,z_0 \right) P0(x0,y0,z0)和平面 A x + B y + C z + D = 0 Ax+By+Cz+D=0 Ax+By+Cz+D=0
点到平面的距离
d = ∣ A x 0 + B y 0 + C z 0 + D ∣ A 2 + B 2 + C 2 d=\frac{|Ax_0+By_0+Cz_0+D|}{\sqrt{A^2+B^2+C^2}} d=A2+B2+C2∣Ax0+By0+Cz0+D∣
二、空间直线及其方程
空间直线的一般方程
两平面的交线即为一条空间直线
平面 Π 1 : A 1 x + B 1 y + C 1 z + D 1 = 0 \varPi _1:A_1x+B_1y+C_1z+D_1=0 Π1:A1x+B1y+C1z+D1=0
平面 Π 2 : A 2 x + B 2 y + C 2 z + D 2 = 0 \varPi _2:A_2x+B_2y+C_2z+D_2=0 Π2:A2x+B2y+C2z+D2=0
一般方程为
{ A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 \left\{ \begin{array}{l} A_1x+B_1y+C_1z+D_1=0\\ A_2x+B_2y+C_2z+D_2=0\\ \end{array} \right. {A1x+B1y+C1z+D1=0A2x+B2y+C2z+D2=0
空间直线的对称式方程(点向式方程)
已知直线 L L L上任意一点 M ( x , y , z ) M\left( x,y,z \right) M(x,y,z)和点 M 0 ( x 0 , y 0 , z 0 ) M_0\left( x_0,y_0,z_0 \right) M0(x0,y0,z0)
直线 L L L的方向向量为 s ⃗ = ( m , n , p ) \vec{s}=\left( m,n,p \right) s=(m,n,p)
则有 M M 0 → = λ s ⃗ \overrightarrow{MM_0}=\lambda \vec{s} MM0=λs
点向式方程为
x − x 0 m = y − y 0 n = z − z 0 p \frac{x-x_0}{m}=\frac{y-y_0}{n}=\frac{z-z_0}{p} mx−x0=ny−y0=pz−z0
空间直线的参数方程
令点向式方程等于 t t t,即
x − x 0 m = y − y 0 n = z − z 0 p = t \frac{x-x_0}{m}=\frac{y-y_0}{n}=\frac{z-z_0}{p}=t mx−x0=ny−y0=pz−z0=t
则参数方程为
{ x = x 0 + m t y = y 0 + n t z = z 0 + p t \left\{ \begin{array}{l} x=x_0+mt\\ y=y_0+nt\\ z=z_0+pt\\ \end{array} \right. ⎩ ⎨ ⎧x=x0+mty=y0+ntz=z0+pt
两直线的夹角
直线 L 1 L_{1} L1的方向向量为 s 1 ⃗ = ( m 1 , n 1 , p 1 ) \vec{s_{1}}=(m_{1},n_{1},p_{1}) s1=(m1,n1,p1),直线 L 2 L_{2} L2的方向向量为 s 2 ⃗ = ( m 2 , n 2 , p 2 ) \vec{s_{2}}=(m_{2},n_{2},p_{2}) s2=(m2,n2,p2)
两直线的夹角为 φ \varphi φ并且 0 ≤ φ ≤ π 2 0\le \varphi \le \frac{\pi}{2} 0≤φ≤2π
两直线夹角的余弦为
cos φ = ∣ m 1 m 2 + n 1 n 2 + p 1 p 2 ∣ m 1 2 + n 1 2 + p 1 2 m 2 2 + n 2 2 + p 2 2 \cos \varphi =\frac{|m_1m_2+n_1n_2+p_1p_2|}{\sqrt{m_1^2+n_1^2+p_1^2}\sqrt{m_{2}^{2}+n_{2}^{2}+p_{2}^{2}}} cosφ=m12+n12+p12m22+n22+p22∣m1m2+n1n2+p1p2∣
直线与平面的夹角
其中直线与平面的夹角范围为 0 ≤ φ < π 2 0\le \varphi <\frac{\pi}{2} 0≤φ<2π
直线的方向向量为 s ⃗ = ( m , n , p ) \vec{s}=\left( m,n,p \right) s=(m,n,p),平面的法向量为 n ⃗ = ( A , B , C ) \vec{n}=\left( A,B,C \right) n=(A,B,C)
直线与平面夹角的正弦为
sin φ = ∣ A m + B n + C p ∣ A 2 + B 2 + C 2 m 2 + n 2 + p 2 \sin \varphi =\frac{|Am+Bn+Cp|}{\sqrt{A^2+B^2+C^2}\sqrt{m^2+n^2+p^2}} sinφ=A2+B2+C2m2+n2+p2∣Am+Bn+Cp∣

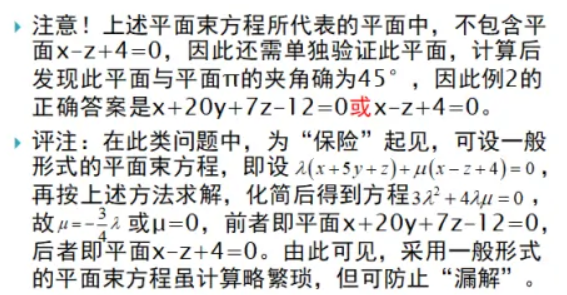
平面束方程
设直线 L L L由方程组
{ A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 \left\{ \begin{array}{l} A_1x+B_1y+C_1z+D_1=0\\ A_2x+B_2y+C_2z+D_2=0\\ \end{array} \right. {A1x+B1y+C1z+D1=0A2x+B2y+C2z+D2=0确定,其中 A 1 、 B 1 、 C 1 和 A 2 、 B 2 、 C 2 A_1\text{、}B_1\text{、}C_1\text{和}A_2\text{、}B_2\text{、}C_2 A1、B1、C1和A2、B2、C2不成比例
通过直线 L L L的所有平面的全体称为平面束
平面束方程为
A 1 x + B 1 y + C 1 z + D 1 + λ ( A 2 x + B 2 y + C 2 z + D 2 ) = 0 A_1x+B_1y+C_1z+D_1+\lambda \left( A_2x+B_2y+C_2z+D_2 \right) =0 A1x+B1y+C1z+D1+λ(A2x+B2y+C2z+D2)=0
三、曲面及其方程
旋转曲面
以一条平面曲线绕其平面上的一条直线旋转一周所成的曲面叫做旋转曲面,旋转曲线和定直线分别叫做旋转曲面的母线和轴。
譬如:曲线 C : f ( y , z ) = 0 C:f\left( y,z \right) =0 C:f(y,z)=0
其绕 z z z轴旋转一周得到的的旋转曲面的方程为
f ( ± x 2 + y 2 , z ) = 0 f\left( \pm \sqrt{x^2+y^2},z \right) =0 f(±x2+y2,z)=0
即在空间直角坐标系中绕 z z z轴旋转,曲线方程中 z z z坐标不变, y y y坐标变为 ± x 2 + y 2 \pm \sqrt{x^2+y^2} ±x2+y2即可得到旋转曲面的方程。
图中的黑色实线分别表示 x x x轴、 y y y轴和 z z z轴
旋转单叶双曲面
将 x O z xOz xOz坐标面上的双曲线
x 2 a 2 − z 2 c 2 = 1 \frac{x^2}{a^2}-\frac{z^2}{c^2}=1 a2x2−c2z2=1
绕 z z z轴旋转一周得到
旋转单叶双曲面方程为
x 2 + y 2 a 2 − z 2 c 2 = 1 \frac{x^2+y^2}{a^2}-\frac{z^2}{c^2}=1 a2x2+y2−c2z2=1
图形
三维视图 三维视图 三维视图
y O z 视图 yOz视图 yOz视图
x O y 视图 xOy视图 xOy视图



旋转双叶双曲面
将 x O z xOz xOz坐标面上的双曲线
x 2 a 2 − z 2 c 2 = 1 \frac{x^2}{a^2}-\frac{z^2}{c^2}=1 a2x2−c2z2=1
绕 x x x轴旋转一周得到
旋转双叶双曲面方程为
x 2 a 2 − y 2 + z 2 c 2 = 1 \frac{x^2}{a^2}-\frac{y^2+z^2}{c^2}=1 a2x2−c2y2+z2=1
图形
三维视图 三维视图 三维视图
y O z 视图 yOz视图 yOz视图
x O y 视图 xOy视图 xOy视图



旋转椭球面
方程
x 2 + y 2 a 2 + z 2 c 2 = 1 \frac{x^2+y^2}{a^2}+\frac{z^2}{c^2}=1 a2x2+y2+c2z2=1
图形
三维视图 三维视图 三维视图
y O z 视图 yOz视图 yOz视图
x O y 视图 xOy视图 xOy视图



柱面
直线 L L L沿定曲线 C C C平行移动形成的轨迹叫做柱面,定曲线 C C C叫做柱面的准线,动直线 L L L叫做柱面的母线
也可以这样认为:在三维坐标系中某个二维坐标面内的曲线沿另一条坐标轴堆叠起来的图形叫做柱面,所以柱面方程中一定只有两个未知量。
只有两个未知量的平面方程所表示的图形也是柱面,譬如: x − z = 0 x-z=0 x−z=0
抛物柱面
譬如: y = x 2 y=x^{2} y=x2
图形
三维视图 三维视图 三维视图
y O z 视图 yOz视图 yOz视图
x O y 视图 xOy视图 xOy视图



椭圆柱面
譬如
x 2 a 2 + y 2 b 2 = 1 \frac{x^2}{a^2}+\frac{y^2}{b^2}=1 a2x2+b2y2=1
图形
三维视图 三维视图 三维视图
y O z 视图 yOz视图 yOz视图
x O y 视图 xOy视图 xOy视图



双曲柱面
譬如
x 2 a 2 − y 2 b 2 = 1 \frac{x^2}{a^2}-\frac{y^2}{b^2}=1 a2x2−b2y2=1
图形
三维视图 三维视图 三维视图
y O z 视图 yOz视图 yOz视图
x O y 视图 xOy视图 xOy视图



二次曲面
三元二次方程 F ( x , y , z ) = 0 F(x,y,z)=0 F(x,y,z)=0所表示的曲面称为二次曲面,把平面称为一次曲面
以下二次曲面均可以通过 x O y xOy xOy、 y O z yOz yOz或 x O z xOz xOz面内的曲线绕某条坐标轴旋转然后伸缩变换得到,称为伸缩变形方法; 还可以通过截痕法来了解曲面形状(自行翻阅书本)
椭圆锥面
方程
x 2 a 2 + y 2 b 2 = z 2 \frac{x^2}{a^2}+\frac{y^2}{b^2}=z^2 a2x2+b2y2=z2
图形
三维视图 三维视图 三维视图
y O z 视图 yOz视图 yOz视图
x O y 视图 xOy视图 xOy视图



椭球面
方程
x 2 a 2 + y 2 b 2 + z 2 c 2 = 1 \frac{x^2}{a^2}+\frac{y^2}{b^2}+\frac{z^2}{c^2}=1 a2x2+b2y2+c2z2=1
图形
三维视图 三维视图 三维视图
y O z 视图 yOz视图 yOz视图
x O y 视图 xOy视图 xOy视图



单叶双曲面
方程
x 2 a 2 + y 2 b 2 − z 2 c 2 = 1 \frac{x^2}{a^2}+\frac{y^2}{b^2}-\frac{z^2}{c^2}=1 a2x2+b2y2−c2z2=1
图形
三维视图 三维视图 三维视图
y O z 视图 yOz视图 yOz视图
x O y 视图 xOy视图 xOy视图



双叶双曲面
方程
x 2 a 2 − y 2 b 2 − z 2 c 2 = 1 \frac{x^2}{a^2}-\frac{y^2}{b^2}-\frac{z^2}{c^2}=1 a2x2−b2y2−c2z2=1
图形
三维视图 三维视图 三维视图
y O z 视图 yOz视图 yOz视图
x O y 视图 xOy视图 xOy视图



椭圆抛物面
方程
x 2 a 2 + y 2 b 2 = z \frac{x^2}{a^2}+\frac{y^2}{b^2}=z a2x2+b2y2=z
图形
三维视图 三维视图 三维视图
y O z 视图 yOz视图 yOz视图
x O y 视图 xOy视图 xOy视图



双曲抛物面
方程
x 2 a 2 − y 2 b 2 = z \frac{x^2}{a^2}-\frac{y^2}{b^2}=z a2x2−b2y2=z
图形
三维视图 三维视图 三维视图
y O z 视图 yOz视图 yOz视图
x O y 视图 xOy视图 xOy视图



四、空间曲线及其方程
空间曲线的一般方程
空间曲线可以看作两个曲面的交线
设 F ( x , y , z ) = 0 F(x,y,z)=0 F(x,y,z)=0和 G ( x , y , z ) = 0 G(x,y,z)=0 G(x,y,z)=0是两个曲面的方程
空间曲线的一般方程为
{ F ( x , y , z ) = 0 G ( x , y , z ) = 0 \left\{ \begin{array}{l} F\left( x,y,z \right) =0\\ G\left( x,y,z \right) =0\\ \end{array} \right. {F(x,y,z)=0G(x,y,z)=0
空间曲线的参数方程
将空间曲线 C C C上动点坐标 x x x、 y y y和 z z z表示为参数 t t t的函数得到空间曲线的参数方程
{ x = x ( t ) y = y ( t ) z = z ( t ) \left\{ \begin{array}{l} x=x\left( t \right)\\ y=y\left( t \right)\\ z=z\left( t \right)\\ \end{array} \right. ⎩ ⎨ ⎧x=x(t)y=y(t)z=z(t)
譬如: { x 2 + y 2 + z 2 = 9 y = x \left\{ \begin{array}{l}x^2+y^2+z^2=9\\y=x\\\end{array} \right. {x2+y2+z2=9y=x的参数方程为 { x = 3 2 cos θ y = 3 2 cos θ z = 3 sin θ ( 0 ≤ θ ≤ 2 π ) \left\{ \begin{array}{l}x=\frac{3}{\sqrt{2}}\cos \theta\\y=\frac{3}{\sqrt{2}}\cos \theta\\ z=3\sin \theta\\ \end{array}\left( 0\le \theta \le 2\pi \right) \right. ⎩ ⎨ ⎧x=23cosθy=23cosθz=3sinθ(0≤θ≤2π)
空间曲线在坐标面上的投影
以 x O y xOy xOy坐标面为例
将空间曲线 C C C的一般方程消去变量 z z z后得到方程 H ( x , y ) = 0 H(x,y)=0 H(x,y)=0,该方程表示的是曲线 C C C关于 x O y xOy xOy面的投影柱面,而该投影柱面与 x O y xOy xOy面的交线叫做空间曲线 C C C在 x O y xOy xOy面上的投影曲线,简称投影。
投影的方程为
{ H ( x , y ) = 0 z = 0 \left\{ \begin{array}{l} H\left( x,y \right) =0\\ z=0\\ \end{array} \right. {H(x,y)=0z=0
其他坐标面与该坐标面的做法相同
总结
以上三维图形的绘制均是借助 m a t l a b matlab matlab软件实现的,相关代码请参考博客:空间中常见曲面图形的绘制(matlab)
文章中绘制的三维图形在这里可以找到
链接:https://pan.baidu.com/s/1-VgPeuLABTe91_LPlCG4eg
提取码:zjmd