广州谦辉信息科技有限公司
(基于Marlin 2.0.x 固件配置 Voron 2.4)

创客基地QQ群:489095605 232237692
邮箱:Huangkaida@makerbase.com.cn
主板购买链接:https://item.taobao.com/item.htm?spm=a1z10.5-c-s.w4002-23356668283.43.7eec55caLTIRlt&id=654986436078
文章目录
- 一、产品简述
- 1.1特点优势
- 1.2主板参数
- 1.3接线图
- 1.3.1 主板各端口接线图
- 1.3.2 基于 Voron 2.4电机接线
- 1.3.3 基于Voron 2.4 PL08N调平传感器接线
- 1.3.4 基于Voron2.4 3Dtouch 接线图
- 1.3.5 基于Voron 2.4 限位接线
- 1.4尺寸图
- 二、固件下载、编译、更新
- 2.1固件下载
- 2.2 固件编译
- 2.2.1 Platformio本地编译
- 2.2.2 网页在线编译
- 2.3固件更新
- 三、驱动跳线设置
- 3.1 A4988驱动跳线设置
- 3.2 TMC2208、TMC2209、TMC2226普通模式跳线设置
- 3.3TMC2225普通模式跳线设置
- 3.4 TMC2208、TMC2209、TMC2225、TMC2226 UART模式跳线设置
- 四、uart模式驱动电流设置
- 4.1在LCD屏上进行电流设置
- 4.2在高级配置文件中进行电流设置
- 五、Marlin 固件配置
- 5.1 固件基本配置(必须配置项)
- 5.1.2 串口配置
- 5.1.3 屏幕配置
- 5.1.4 使能sd卡
- 5.1.5 使能eeprom
- 5.1.6 配置编译环境
- 5.2机器参数配置(根据机器参数设置)
- 5.2.1 挤出头个数配置
- 5.2.2 热敏类型配置
- 5.2.3 限位开关配置
- 5.2.4 脉冲设置
- 5.2.5 机器类型配置
- 5.2.6 归零方向设置
- 5.2.7 打印平台范围设置
- 5.2.8 4Z电机配置
- 5.2.9 电机方向设置
- 6.3高级配置
- 6.3.1 断电续打(默认固件已经使能)
- 6.3.2 断料检测
- 6.3.3TMC 2208/TMC 2209/TMC 2225/TMC 2226 uart 模式配置
- 七、4Z自动调平(传感器为PL08N)
- 7.1设置传感器触发电平
- 7.2设置传感器信号pin
- 7.3 偏移设置
- 7.4设置调平时传感器与打印平台边缘的距离
- 7.5 配置探测类型
- 7.6 使能4Z自动调平
- 7.7 设置4个电机的探测位置
- 7.8设置调平次数
- 7.9 z_safe_homing 配置
- 八、4Z自动调平(传感器为3Dtouch)
- 8.1设置传感器触发电平
- 8.2设置传感器信号pin
- 8.3 配置探测类型(使能BLTOUCH)
- 8.4设置探针与挤出头之间的偏移
- 8.5设置调平时传感器与打印平台边缘的距离
- 8.6 使能舵机
- 8.7 设置舵机pin口
- 8.8 使能4Z自动调平
- 8.9 设置4个电机的探测位置
- 8.10设置调平次数
- 8.11 z_safe_homing 配置
- 九、LCD 屏上4Z自动调平操作
- 十、z_offset调整
- 10.1 z_offset调整向导配置
- 10.2在 LCD 屏上幕操作调节z_offset
- 十一、屏幕外壳、主板安装支架stl文件下载链接
- 十二、技术支持及保证
- 十三、FAQ
一、产品简述
MKS MONSTER8 V1.0主板是创客基地为满足市场需求而推出的主板,可用于Voron 2.4机器安装,支Marlin 固件和Klipper固件,支持U盘打印(暂时只有Marlin固件支持),支持TMC驱动UART模式。
1.1特点优势
1、TVS电源尖峰处理,更好地保护后端电路和负载;
2、3路可控风扇输出,输出端电压可调,分别可调为5V、12V、24V;
3、支持U盘打印(目前只有Marlin固件支持);
4、用户可自己更换电机驱动,支持A4988、DRV8825、LV8729、TMC2208、TMC2209、TMC2225、TMC2226;
5、采用高质量MOSFET管,散热效果更好,保证长时间工作稳定;
6、采用专用电源芯片,支持12V-24V电源输入,
7、稳定可靠的滤波电路大大降低干扰的可能性,最大可能的避免打印过程中出现的死机、乱跑等现象;
8、使用开源固件Marlin和Klipper;
9、支持LCD2004、LCD12864、MKS MINI12864 V1.0、MKS MINI12864 V3.0,支持创客开发的TFT24、TFT28、TFT32、TFT35、H43触摸屏;
10、持TMC2130驱动SPI 模式,TMC2208、TMC2209、TMC2225、TMC2226 UART模式,支持TMC2209、TMC2226无限位归零。
1.2主板参数

1.3接线图
1.3.1 主板各端口接线图


1.3.2 基于 Voron 2.4电机接线



注意:请务必按照以上接线,A、B电机接线错会导致移动错误,打印镜像等,4Z顺序接错会导致调平不对。
1.3.3 基于Voron 2.4 PL08N调平传感器接线
PL08N的三根线接线分别棕色接电源正极,蓝色接电源负极,黑色接调平接口信号pin;当PL08N只用作调平时,PL08N的信号线(黑色)接到Z_MAX限位S端;当PL08N用作归零Z限位(z_safe_homing)功能时,PL08N的信号线(黑色)接到Z_MIN限位。


1.3.4 基于Voron2.4 3Dtouch 接线图
3Dtouch只用作调平时,3D touch的信号线接到Z_MAX 信号pin

3Dtouch用作限位(z_safe_homing)时,3D touch的信号线接到Z_MIN 信号pin

1.3.5 基于Voron 2.4 限位接线
基于Voron 2.4,X 轴和Y轴的归零位置为右上角,即X轴和Y轴的归零方向是往最大方向,则X轴和Y轴限位接到X_MAX和Y_MAX 限位。
1.4尺寸图

二、固件下载、编译、更新
2.1固件下载
MKS MONSTER8 V1.0适配的固件为Marlin2.X固件,固件可在MAKERBASE官方Github下载,固件下载地址:
https://github.com/makerbase-mks/MKS-Monster8/tree/main/marlin%20firmware%20for%20voron
2.2 固件编译
2.2.1 Platformio本地编译
Platformio本地编译需要先安装VScode软件 和安装platformio编译插件,安装详情请参考视频教程:https://www.bilibili.com/video/BV1XK4y1C7k5
2.2.2 网页在线编译
在线编译,可登录创客基地百众云网页,上传固件的压缩包,在线编译,编译成功后的固件文件将会发送到你的邮箱,方便快捷,在线编译网址:https://baizhongyun.cn/home/index
网页在线编译教程链接:https://blog.csdn.net/gjy_skyblue/article/details/118763474?spm=1001.2014.3001.5501
2.3固件更新
本地VScode进行编译的,编译成功后的.bin文件在.pio文件夹中:

在网页进行编译的,编译成功后的mks_monster8.bin文件会发送到网页上所填写的邮箱;
将mks_monster8.bin文件复制到TF卡,将卡插入到主板的TF卡槽中,然后上电,等待固件更新即可;更新成功后,TF卡中的mks_monster8.bin 会被重命名为MKS_MONSTER8.CUR,需要重新更新固件的,需要先把TF卡中的MKS_MONSTER8.CUR文件上删除,然后再把mks/_monster8.bin文件复制到TF卡中。
三、驱动跳线设置
注:主板上给驱动供电的电压是可以通过跳线设置的,可以设置为3.3或者5V,必须设置为其中一个,不设置驱动将无法工作,建议设置为5V,设置为3.3V时,A4988驱动的电压将减半,电流也减半。

3.1 A4988驱动跳线设置
A4988驱动细分跳线方式,驱动下方的3个跳线帽都插上是16细分,如下图(X轴为例):

3.2 TMC2208、TMC2209、TMC2226普通模式跳线设置
TMC2208、TMC2209、TMC2226驱动细分跳线方式,驱动下方的2个跳线帽(M0、M1)插上是16细分,如下图(X轴为例):

3.3TMC2225普通模式跳线设置
TMC2225驱动细分跳线方式,驱动下方右边的第2个跳线帽(M1)插上是16细分,如下图(X轴为例):

3.4 TMC2208、TMC2209、TMC2225、TMC2226 UART模式跳线设置
TMC2208、TMC2209、TMC2225、TMC2226 UART模式跳线设置都是相同的,驱动下方的左边第3个跳线插上即为uart模式,如下图(X轴为例):

注:基于Voron V2.4 ,为了方便进行驱动电流调节,mks monter8 V1.0主板的默认固件(mks qq群或mks github上获取的固件)是使能了7个 TMC2209 UART 模式的,所以直接用默认固件的,需要7个驱动均设置为uart 模式。

注:UART模式的使用还需要在固件上使能TMC驱动,配置方式详见6.3.3
四、uart模式驱动电流设置
电流的设置需要根据自己所用到的电机的额定电流进行配置,电机的额定电流(峰值电流)除以1.41即为LCD屏上或高级配置文件上设置的电流,有些电机的线圈内阻较大,按照电机的额定电流进行配置,可能会导致电机发热严重,这时候就需要减少电流,建议是设置的电流为电机的额定电流的80%到90%,例如:
电机的额定电流为1.2A,电流就可以设置为1A, 则LCD上或高级配置文件中设置的电流为:1A/1.41=0.7A
4.1在LCD屏上进行电流设置
在屏上按下旋转编码器→配置→高级配置→TMC驱动器→驱动电流,就可以对电流进行配置了,配置完后还需要退回到配置界面进行参数的保存和装载:


4.2在高级配置文件中进行电流设置
在高级配置文件中找到TMC驱动电流配置项,然后修改电流,以X轴为例,设置700mA。

五、Marlin 固件配置
5.1 固件基本配置(必须配置项)
(注:使用mks monster8 默认固件,从mks monster8 github页面或makerbase qq群下载的mks monter8固件,这些配置项都是已经配置好的,不用进行配置,如果是从marlin github下载的固件则需要进行配置)
5.1.1板卡配置
在configuration.h文件中将板卡配置为BOARD_MKS_MONSTER8

5.1.2 串口配置
在configuration.h文件中将串口设置为-1,配置错误会将会导致主板与电脑上位机无法连接。

注:电脑的上位机与主板连接需要上位机设置的波特率与主板设置的一致,默认设置的波特率为250000。
5.1.3 屏幕配置
基于VORON 2.4 ,mks monster8 V1.0主板搭配的LCD屏幕为mks mini12864 V3.0
在配置文件使能MKS _MINI12864 _V3

注:MKS MINI12864 V3.0 LCD的尺寸和 Voron 2.4的是不一致的,所以不能直接用 Voron 2.4的stl文件打印LCD外壳,MKS MINI12864 V3.0的外壳下载链接:
https://baizhongyun.cn/home/modeldetailv_0223bb5e-a7fa-499e-99f7-26ff8669e5c9
5.1.4 使能sd卡
在配置文件中使能#define SDSUPPORT

需要在LCD屏上读取SD文件的,需要在pinS_MKS_MONSTER8.h文件中设置为 #define SDCARD_CONNECTION LCD

5.1.5 使能eeprom
在配置文件中使能#define EEPROM_SETTINGS

5.1.6 配置编译环境
在platformio.ini文件中将编译环境改为mks_monster8_usb_flash_drive

5.2机器参数配置(根据机器参数设置)
5.2.1 挤出头个数配置
MKS MONSTER8 V1.0最多支持3个挤出头,基于Voron V2.4,设置为1个挤出头即可(默认固件设置为1)

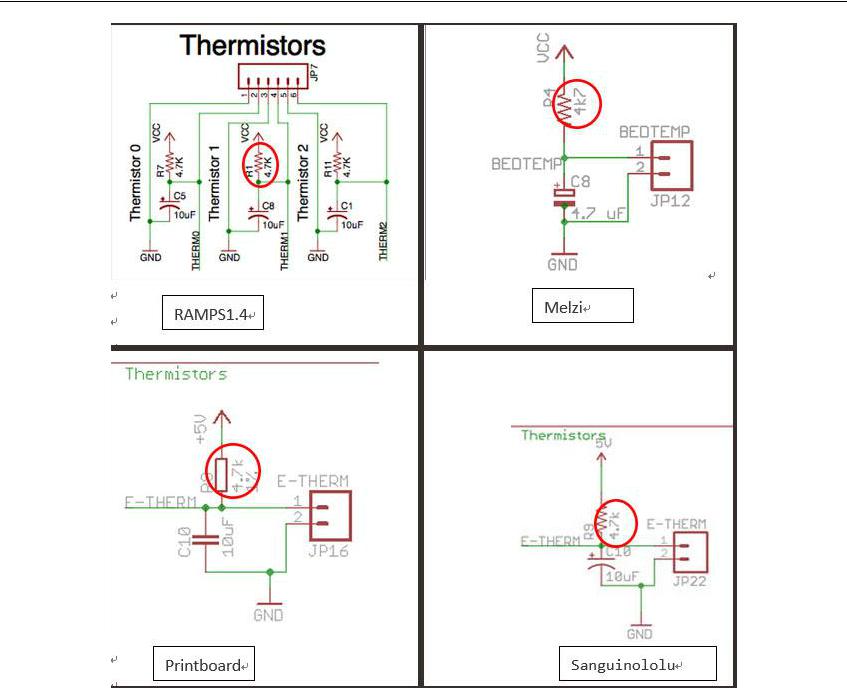
5.2.2 热敏类型配置
MKS MONSTER8仅支持100K热敏,#define TEMP_SENSOR_0为挤出头1,#define TEMP_SENSOR_BED 为热床
(基于 Voron2.4默认固件已使能热床和挤出头1为100K热敏)

5.2.3 限位开关配置
限位开关使能,基于Voron 2.4,X 轴和Y轴的归零位置为右上角,即X轴和Y轴的归零方向是往最大方向,则X轴和Y轴使能X_MAX和Y_MAX 限位;Z轴归零为往最小方向,则使能Z_MIN限位。

限位开关类型的配置(true/false),true为常开型开关(NO),false为常闭型开关(NC),基于Voron 2.4,限位建议设置为常闭型开关(注:常闭型开关接线方式下图)


5.2.4 脉冲设置
在配置文件中的#define DEFAULT_AXIS_STEPS_PER_UNIT {80, 80, 400, 382.1666}分别进行X、Y、Z、E各轴的脉冲设置(基于Voron2.4,默认的脉冲分别为80、80、400、382.1666)。

5.2.5 机器类型配置
Voron 2.4的机器类型是corexy机型,则需要在配置文件中使能corexy

5.2.6 归零方向设置
在配置文件中进行归零方向设置,-1为往最小方向,1为往最大方向,基于 voron 2.4,X 轴和Y轴的零点在右上角,则X和Y为往最大方向归零,Z轴往最小方向归零(默认固件已配置为X和Y往最大方向回零,Z往最小方向归零,注意不能强制把右上角设置为最小零点,强制设置会导致X和Y轴打印出现镜像)。

5.2.7 打印平台范围设置
Voron 2.4机器打印尺寸分为3款(单位mm):250x250x230、300x300x280、350x350x330;可以根据自己的机器的尺寸进行设置,默认固件的尺寸为250x250x230。

5.2.8 4Z电机配置
在高级配置文件中将#define NUM_Z_STEPPER_DRIVERS 1配置为#define NUM_Z_STEPPER_DRIVERS 4 (默认固件已使能为4Z电机)

5.2.9 电机方向设置
配置文件中的电机方向配置如下图:

X和Y轴移动方向设置:
移动方向是否正确,我们可以通过在屏上操作移动进行检查,上电前我们可以将挤出头手动推动到平台中间的位置,上电后,按下旋转编码器进入运动→移动轴→移动X轴/移动Y轴(注意不要移动太远距离,否则会撞挤出头),上电后默认X、Y轴的位置为最大的位置,只能往最小方向移动;正视打印机,移动X轴时,正确的方向是X轴往左移动;移动Y轴时,Y轴的轴的正确方向是往前移动;出现移动方向不对,需要修改配置文件中的电机方向,修改方法和参考如下:
1)错误1:屏上操作移动X轴时,机器上的Y轴往前移动,屏上操作移动Y轴时,机器上的X 轴往左移动,是A电机(Y轴电机移动方向)错误,B电机(X轴电机移动方向正确),需要在配置文件中将Y轴的电机的移动方向相反配置,则由原来的true改为false,或由原来的false改为true;
2)错误2:屏上操作移动X轴时,机器上的Y轴往后移动,屏上操作移动Y轴时,机器上的X 轴往右移动,是B电机(X轴电机移动方向)错误,A电机(Y轴电机移动方向正确),需要在配置文件中将X轴的电机的移动方向相反配置,则由原来的true改为false,或由原来的false改为true;
3)错误3:屏上操作移动X轴时,机器上的X轴往右移动,屏上操作移动Y轴时,机器上的Y轴往后移动,是A、B电机方向都是错误的,需要在配置文件中将X、Y轴的电机的移动方向相反配置,则由原来的true改为false,或由原来的false改为true;
Z轴电机方向配置:
Voron 2.4的机器是有4个Z轴电机,电机方向的配置如下:
首先需要确认Z1电机的方向,在屏上操作移动Z轴向上、向下(注意不要移动太远距离),Z1电机能正确的按照操作上、下移动即可,如果不对则需要修改Z1电机方向,将原来的false改为true,true改为false。

然后是Z2、Z3、Z4电机方向的修改,同样是在屏上操作移动Z轴,然后分别观察Z2、Z3、Z4电机的移动方向是否能按照操作的正确上下,如果方向不对,则需要在高级配置文件中进行配置;
使能Z2、Z3、Z4的电机方向与Z1的一致会分别改变Z2、Z3、Z4电机的方向;如果是默认使能的,需要修改电机方向,则需要进行屏蔽。

6.3高级配置
6.3.1 断电续打(默认固件已经使能)
在高级配置configuration_adv.h文件中,使能
#define POWER_LOSS_RECOVERY将 #define PLR_ENABLED_DEFAULT false改为
#define PLR_ENABLED_DEFAULT true

6.3.2 断料检测
在配置文件中使能#define FILAMENT_RUNOUT_SENSOR

在配置文件设置断料检测开关的电平(LOW/HIGH)

在配置文件文件中使能#define NOZZLE_PARK_FEATURE

在高级配置文件中使能#define ADVANCED_PAUSE_FEATURE

在高级配置文件使能#define PARK_HEAD_ON_PAUSE

在pins_MONSTER8.h文件中增加断料检测pin(注:该pin口需要根据断料检测开关所接到的pin进行配置,以断料检测接到X_MIN的限位为例,X_MIN限位的pin为PA14,)

6.3.3TMC 2208/TMC 2209/TMC 2225/TMC 2226 uart 模式配置
TMC 驱动 uart模式,需要硬件支持,驱动下方的左边第3个跳线插上即为uart模式,如下图(X轴为例):

在配置文件中使能TMC驱动,TMC2208和TMC2225均使能为TMC 2208,TMC 2209和TMC2226均使能为TMC2209,(基于Voron 2.4,默认的固件已使能了TMC2209 UART模式)。

七、4Z自动调平(传感器为PL08N)
7.1设置传感器触发电平
PL08N为常开型开关,触发电平设置为true

7.2设置传感器信号pin
传感器信号pin需要根据主板的接线进行设置,(黑线是PL08N的信号线,基于Voron 2.4接到Z_MAX 限位PB12)。
注:使用z_safe_homin功能,跳过此项配置,详见7.9 z_safe_homing配置(默认固件是使能了PL08N z_safe_homin功能)

7.3 偏移设置
基于Voron2.4,X、Y轴的偏移为0、25,Z的偏移(z_offset)可以在调平完后进行测试调整。

7.4设置调平时传感器与打印平台边缘的距离
该数值默认为10(注:该数值不能设置为太小,太小会导致调平时传感器超出平台范围,导致调平失败)

7.5 配置探测类型
PL08N的探测类型为#define FIX_MOUNTED_PROBE (默认固件已使能)

7.6 使能4Z自动调平
在高级配置文件使能4Z自动调平(默认固件已使能)

7.7 设置4个电机的探测位置

7.8设置调平次数

7.9 z_safe_homing 配置
注:z_safe_homing 是利用PL08N 作为Z轴的回零限位,其他配置项均与不使用z_safe_homing配置相同(7.2设置传感器信号pin除外),不使用z_safe_homing功能的,不用进行以下配置。
1)、传感器信号pin设置,使用z_safe_homin功能,是使用z_min的限位pin,需要确保配置文件使能了#define Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN

2)、在配置文件使能z_safe_homing

八、4Z自动调平(传感器为3Dtouch)
8.1设置传感器触发电平
3dtouch的电平设置为false

8.2设置传感器信号pin
传感器信号pin需要根据主板的接线进行设置,基于voron2.4接到Z_MAX 限位(注:3Dtouch的信号控制线为2pin线,黑线和白线,白线是信号线,以接到Z_MAX限位为例 PB12)。
注:使用z_safe_homin功能,跳过此项配置,详见8.11 z_safe_homing配置

8.3 配置探测类型(使能BLTOUCH)

8.4设置探针与挤出头之间的偏移
基于Voron2.4,X、Y轴的偏移为0、25,Z的偏移(z_offset)可以在调平完后进行测试调整。

8.5设置调平时传感器与打印平台边缘的距离
该数值默认为10(注:该数值不能设置为太小,太小会导致调平时传感器超出平台范围,导致调平失败)

8.6 使能舵机
在配置文件中使能舵机#define NUM_SERVOS 1

8.7 设置舵机pin口
在pins_MONSTER8.h的文件中增加舵机pin(默认配置为PA8)

8.8 使能4Z自动调平
在高级配置文件使能4Z自动调平

8.9 设置4个电机的探测位置
在高级配置文件中将探测位置类型设置为0

8.10设置调平次数

8.11 z_safe_homing 配置
注:z_safe_homing 是利用3Dtouch 作为Z轴的回零限位,其他配置项均与不使用z_safe_homing配置相同(8.2设置传感器信号pin除外),不使用z_safe_homing功能的,不用进行以下配置。
1)、传感器信号pin设置,使用z_safe_homin功能,是使用z_min的限位pin,需要确保配置文件使能了#define Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN

2)、在配置文件使能z_safe_homing

九、LCD 屏上4Z自动调平操作
在屏上按下旋转编码器→运动→自动Z对齐,即可开始自动4Z自动调平(调平的过程Z轴电机会自动调整为相对平台的一个平面,默认固件进行5次调平,平台请尽量安装水平,不然可能会导致自动调平后Z轴出现较大倾斜,断电后或解锁电机后Z轴滑落,出现这种情况每次打印前都需要进行调平)


十、z_offset调整
10.1 z_offset调整向导配置
在高级配置文件中使能#define PROBE_OFFSET_WIZARD(默认固件已使能)

10.2在 LCD 屏上幕操作调节z_offset
调节z_offset前先进行自动调平,调平完后在主界面按下旋转按钮→进入配置→高级配置→探针偏移量→Z Probe Wizard→然后旋转编码器,慢慢降低Z轴,直到喷嘴与平台保持A4纸厚度的距离→点击完成→然后退回配置界面→保存设置、装载设置。
第一步:进入配置

第二步:进入高级设置

第三步:点击探针偏移量

第四步:点击Z Probe Wizard

第五步:旋转编码器,降低Z轴,喷嘴与平台保持A4纸厚度的距离即可

第六步:点击完成

第七步:点击保存设置→装载设置

十一、屏幕外壳、主板安装支架stl文件下载链接
MKS MINI12864 V3.0(正插) 外壳安装下载链接:
https://baizhongyun.cn/home/modeldetailv_f12fe242-9909-4b93-9d3f-887a3056ad60
MKS MINI12864 V3.0(侧插) 外壳安装下载链:
https://baizhongyun.cn/home/modeldetailv_0223bb5e-a7fa-499e-99f7-26ff8669e5c9
主板安装支架下载链接:http://www.baizhongyun.cn/home/modeldetailv_60b5a132-e5ef-4b99-a1f1-f4b017009722
十二、技术支持及保证
发货前会做通电测试,保证可以正式使用才发货。
欢迎各位朋友加入讨论群:232237692
欢迎光临博客交流: https://blog.csdn.net/gjy_skyblue
3D打印机主板定制,联系黄生:13148932315 谭生:15521395023 彭生:13427595835
有问题可联系我们客服或者在群里找技术支持人员,我们将竭诚为您服务
十三、FAQ
1、更新固件后,LCD屏上显示的脉冲、最大速度等参数不对如何处理
答:在屏上进入高级设置界面,初始化eeprom,然后返回到设置界面,保存数据,加载数据
2、主板无法与电脑的上位机连接怎么办?
答:确认配置文件中的主板的串口是否正确,MKS MONSTER8V1.0使用的是串口-1;
主板连接到电脑后,进入设备管理器查看电脑是否识别了主板的com口,如识别了,可以重启上位机,上位机设置的波特率需要与配置文件设置的一致;如无法识别,检查usb的连接是否接触不良。
3、屏上出现TMC 报错如何让处理?
答:屏上出现TMC驱动报错是因为主板固件使能了TMC 驱动uart模式,而主板与驱动之间通讯失败。
1)、确认主板是否用了TMC驱动(TMC2208、2209、2225、2226),如果没有使用,则需要在配置文件屏蔽TMC驱动
2)、使用了TMC驱动,固件配置又是正确的,需要确认硬件是否已设置为uart 模式,就是驱动下方的跳线是否正确,详见3.4
3)、如果以上配置都正确,则有可能是存在驱动有问题,可以用上位机发送指令M122查看,显示ok的通讯成功,allow的通讯失败。
4、用的marlin原始固件进行修改,复位后屏上出现SD卡初始化失败如何处理?
答:在配置文件使能 #define SD_CHECK_AND_RETRY即可