数据包解析
- 数据包理解
- 七层协议详解
- OSI七层协议中每一层的特征
- 数据包解析
- 如何改变文本的样式
- TCP数据包结构:
数据包理解
从专业的角度来说,(网络协议)OSI就是一个开放的通信系统互联参考模型,也是一个定义的很好的协议规范。OSI模型有7层结构,每层都可以有几个子层。OSI的7层从下到上分别是7-应用层、6-表示层、5-会话层、4-传输层、3-网络层、2-数据链路层、1-物理层。
七层协议详解
物理层:是参考模型的最低层。该层是网络通信的数据传输介质,由连接不同结点的电缆与设备共同构成。主要跟功能是:利用传输介质为数据链路层提供物理连接,负责处理数据传输并监控数据出错率,以便数据流的透明传输。
数据链路层:四参考模型的第二层。主要功能是:在物理层提供的服务基础上,在通信的实体间建立数据链路连接,传输以“帧”为单位的数据包,并采用差错控制与流量控制方法,使有差错的物理线路变成无差错的数据链路。
网络层:是参考模型的第三层。主要功能是:为数据在节点之间传输创建逻辑链路,通过路由选择算法为分组通过通信子网选择最适当的路径,以及实现拥塞控制、网络互连等功能。
传输层:是参考模型的第四层。主要功能是:向用户提供可靠地端到端服务,处理数据包错误、数据包次序,以及其他一些关键传输问题。传输层向高层屏蔽了下层数据通信的细节。因此,它是计算机通信体系结构中关键的一层。
会话层:是参考模型的第五层。主要功能是:负责维扩两个结点之间的传输连接,以便确保点到点传输不中断,以及管理数据交换等功能。
表示层:是参考模型的第六层。主要功能是:用于处理在两个通信系统中交换信息的表示方法,主要包括数据格式变换、数据加密与解密、数据压缩与恢复等功能。
应用层:是参考模型的最高层。主要功能是:为应用软件提供了很多服务,比如文件服务器、数据库服务、电子邮件与其他网络软件服务。
OSI七层协议中每一层的特征
第一层:物理层
机械性能:接口的形状,尺寸的大小,引脚的数目和排列方式等;
电气性能:接口规定信号的电压、电流、阻抗、波形、速率好平衡特性等;
工程规范:接口引脚的意义、特性、标准。
工作方式:确定数据位流的传输方式,如:半双工、全双工等。
物理层协议:美国电子工业协会(EIA)的RS232/RS422/RS423等;
国际电报电话咨询委员会(CCITT)的X.25/X.21等;
物理层的数据单位是位(BIT),典型设备时集线器HUB。
这主要是和硬件有关,与软件关系不大。
第二层:链路层
链路层屏蔽传输介质的物理特征,使数据可靠传送。
内容包括介质访问控制、连接控制、顺序控制、流量控制、差错控制和仲裁协议等。
链路层协议有:协议有面向字符的通讯协议(PPP)和面向位的通讯协议(HDLC)。
仲裁协议:CSMA/CD(Carrier Sense Multiple Access with Collision Detection)、Token Bus、Token Ring
链路层数据单位是帧,实现对MAC地址的访问,典型设备是交换机SWITCH。
第三层:网络层
网络层管理连接方式和路由选择。
连接方式:虚电路和数据报服务。
虚电路是面向连接的,数据通讯一次路由,通过会话建立的一条通路。数据报是非连接的,每个数据报都有路由能力。网络层的数据单位是包,使用的是IP地址,典型设备时路由器Router。
这一层可以进行流量控制,但流量控制更多的是使用第二层或第四层。
第四层:传输层
提供端到端的服务,可以实现流量控制、负载均衡。
传输层信息包括端口、控制字和校验和。
传输层协议主要是TCP和UDP。
传输层位于OSI的第四层,这层使用的设备时主机本身。
第五层:会话层
会话层主要内容时通过 绘画进行身份验证、绘画管理和确定通讯方式。一旦建立连接,会话层的任务就是管理会话。
第六层:表示层
表示层主要是解释通讯数据的意义,如代码转换、格式变换等,使不同的终端可以表示。
还包括加密与解密、压缩与解压等。
第七层:应用层
应用层应该是直接面向用户的程序或服务,包括系统程序和用户程序,比如www、FTP、DNS、POP3和SMTP等都是应用层服务。
数据再发送时是数据从应用层至物理层的一个大包的过程,接收时是数据从物理层至应用层的一个解包过程。
从功能角度可以分为三组:1/2层解决网络通信问题,3/4层解决传输问题,5/6/7层处理对应用进程的访问。
从控制角度可分为二组:1/2/3层是通信子网,4/5/6/7是主机控制层。
数据包解析

如何改变文本的样式
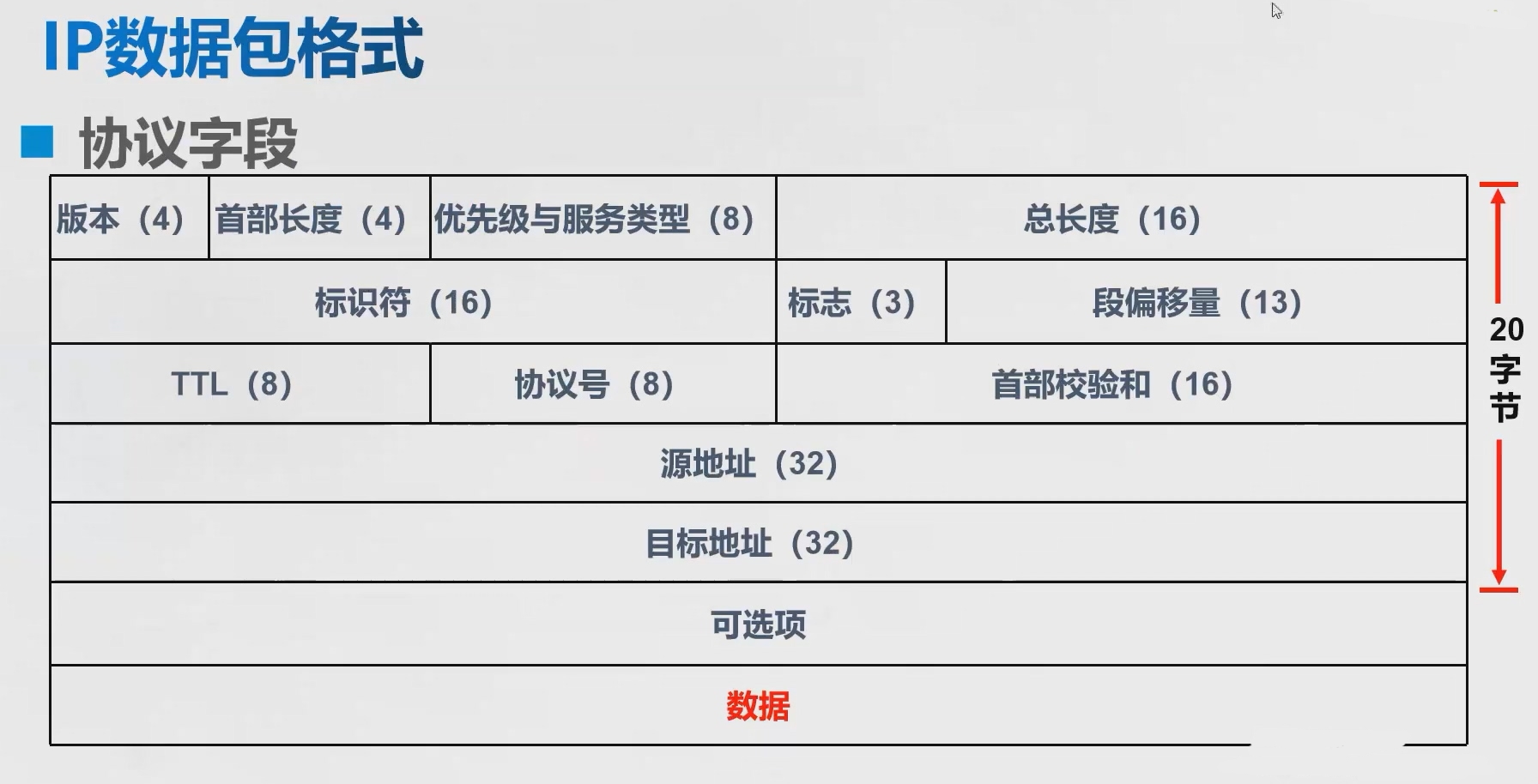
如图,一个刻度表示1个二进制位(比特)。
1-1.版本号4位,表示版本号号,眼下最广泛的是4=B1000,即常说的IPv4;相信IPv6以后会广泛应用,它能给世界上每一个纽扣都分配
一个IP地址。
1-2.头长4位,数据包头部长度。它表示数据包头部包含多少个32位长整型,也就是多少个4字节的数据。无选项则为5(红色部分)。
1-3.服务类型,包含8个二进制位,每一个位的意义例如以下:
过程字段:3位,设置了数据包的重要性,取值越大数据越重要,取值范围为:0(正常)~ 7(网络控制)延迟字段:1位,取值:0(正常)、1(期特低的延迟)流量字段:1位,取值:0(正常)、1(期特高的流量)可靠性字段:1位,取值:0(正常)、1(期特高的可靠性)成本字段:1位,取值:0(正常)、1(期特最小成本)保留字段:1位 ,未使用
1-4.包裹总长16位,当前数据包的总长度,单位是字节。当然最大仅仅能是65535,及64KB。
2-1.重组标识16位,发送主机赋予的标识,以便接收方进行分片重组。
2-2.标志3位,他们各自的意义例如以下:
保留段位(2):1位,未使用不分段位(1):1位,取值:0(同意数据报分段)、1(数据报不能分段)很多其它段位(0):1位,取值:0(数据包后面没有包,该包为最后的包)、1(数据包后面有很多其它的包)
2-3.段偏移量13位,与很多其它段位组合,帮助接收方组合分段的报文,以字节为单位。
3-1.生存时间8位,常常ping命令看到的TTL(Time To Live)就是这个,每经过一个路由器,该值就减一,到零丢弃。
3-2.协议代码8位,表明使用该包裹的上层协议,如TCP=6,ICMP=1,UDP=17等。
3-3.头检验和16位,是IPv4数据包头部的校验和。
4-1.源始地址,32位4字节,我们常看到的IP是将每一个字节用点(.)分开,如此而已。
5-1.目的地址,32位,同上。
6-1.可选选项,主要是给一些特殊的情况使用,往往安全路由会当作攻击而过滤掉,普联(TP_LINK)的TL-ER5110路由就能这么做。
7-1.用户数据。
强调文本 强调文本
TCP数据包结构:

1-1.源始port16位,范围当然是0-65535啦。
1-2.目的port,同上。
2-1.数据序号32位,TCP为发送的每一个字节都编一个号码,这里存储当前数据包数据第一个字节的序号。
3-1.确认序号32位,为了安全,TCP告诉接受者希望他下次接到数据包的第一个字节的序号。
4-1.偏移4位,类似IP,表明数据距包头有多少个32位。
4-2.保留6位,未使用,应置零。
4-3.紧急比特URG—当URG=1时,表明紧急指针字段有效。它告诉系统此报文段中有紧急数据,应尽快传送(相当于高优先级的数据)。
4-3.确认比特ACK—仅仅有当ACK=1时确认号字段才有效。当ACK=0时,确认号无效。參考TCP三次握手
4-4.复位比特RST(Reset) —当RST=1时,表明TCP连接中出现严重差错(如因为主机崩溃或其它原因),必须释放连接,然后再又一次
建立运输连接。參考TCP三次握手
4-5.同步比特SYN—同步比特SYN置为1,就表示这是一个连接请求或连接接受报文。參考TCP三次握手
4-6.终止比特FIN(FINal)—用来释放一个连接。当FIN=1时,表明此报文段的发送端的数据已发送完成,并要求释放运输连接。
4-7.窗体字段16位,窗体字段用来控制对方发送的数据量,单位为字节。TCP连接的一端依据设置的缓存空间大小确定自己的接收窗体
大小,然后通知对方以确定对方的发送窗体的上限。
5-1.包校验和16位,包含首部和数据这两部分。在计算检验和时,要在TCP报文段的前面加上12字节的伪首部。
5-2.紧急指针16位,紧急指针指出在本报文段中的紧急数据的最后一个字节的序号。
6-1.可选选项24位,类似IP,是可选选项。
6-2.填充8位,使选项凑足32位。
7-1.用户数据……
能够看出,每一个IP包至少要20字节的头部长度,这些与下载内容无关,加上眼下多数传输,包含http协议(就是IE直接下载),都是基于
TCP协议的,所以IP包裹还要从用户数据中扣除20字节的TCP包头,这里已经是40字节,加上其它程序的连接,状态确认等等包裹,因
而算出来要比理论值要小。
另外网络环境(包含稳定因素和传输节点的转发率)也是影响下载速度的重要原因……
python链接:https://www.cnblogs.com/baihualin/p/10730513.html
转自:https://baijiahao.baidu.com/s?id=1623342279899809678&wfr=spider&for=pc
转自:https://blog.csdn.net/qq_36607836/article/details/88627956