一、进入scapy交互界面
在终端下输入:scapy ,进入交互界面:
二、查看scapy已经实现的网络协议
ls() 列出scapy中已实现的网络协议
ls(协议类型) 查看某个协议头部字段格式
lsc() 列出scapy中可以使用的命令或函数,比如嗅探时,我们经常会用到sniff()函数
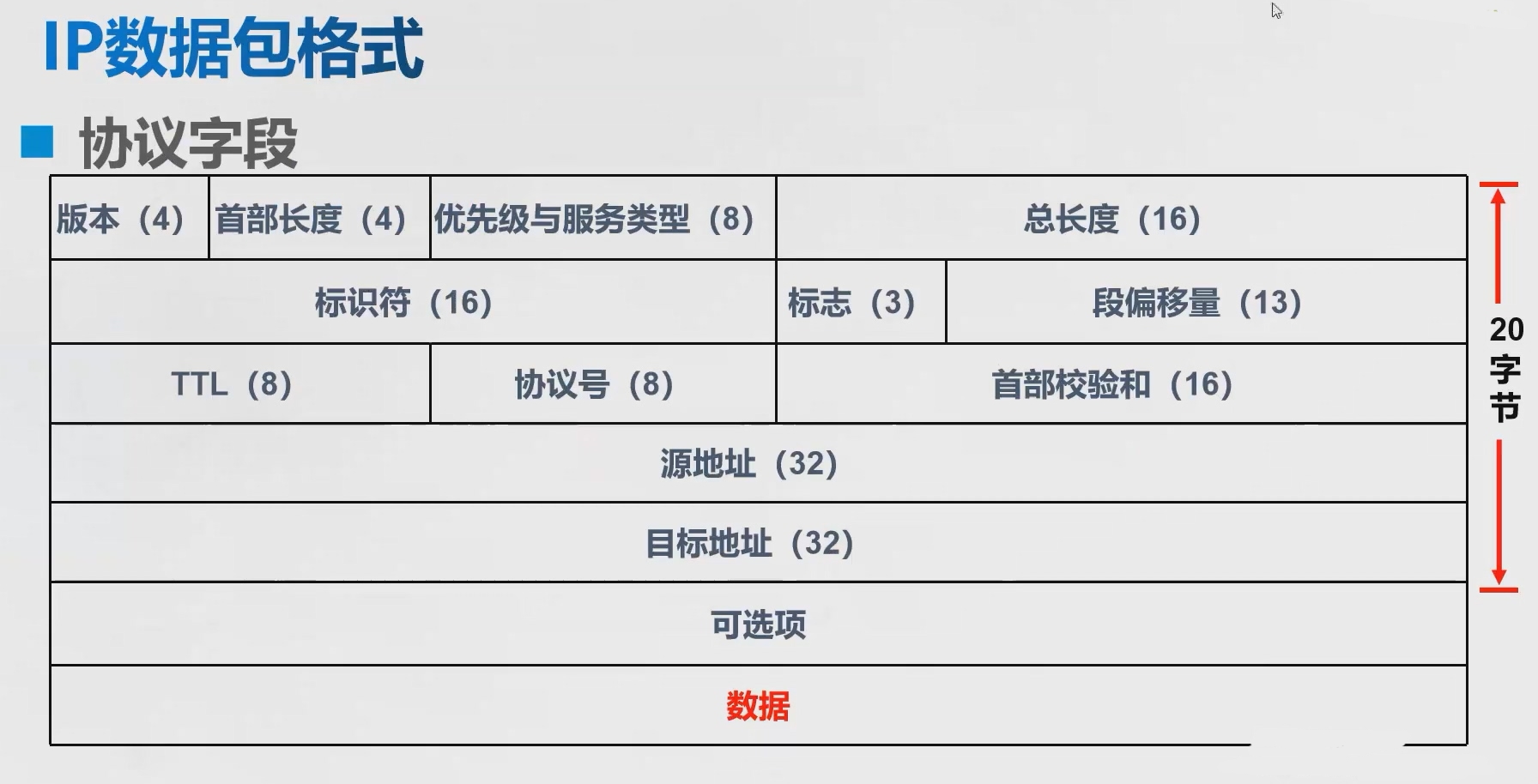
IP().show() 显示包的IP信息
IP().display() 显示包的模板
dpkg = sniff(filter="tcp",count=4)
dpkg[2].show() 显示包抓取到的tkpk的第3个数据包的的详细内容
dpkg[2].summary() 查看捕获到数据包的信息摘要
wrpcap("dpkgsniff.pcap",dpkg) 将嗅探到的packet内容写到pcap文件
dpkg_read = rdpcap("dpkgsniff.pcap") 读取pcap文件
三、构造数据包
#构造一个ip数据包
dpkg = IP()
#修改数据包的值
dpkg.ttl = 24