ARP
全称:Address Resolution Protocol 地址解析协议
ARP请求
数据包的目的地址是(ff:ff:ff:ff:ff:ff),这是以太网中的广播地址,
所有发送到这个地址的数据包都会被广播到当前网段中的所有设备。这个数据
包中以太网头的源地址就是我们的MAC 地址
ARP响应
响应 我的MAC 是多少
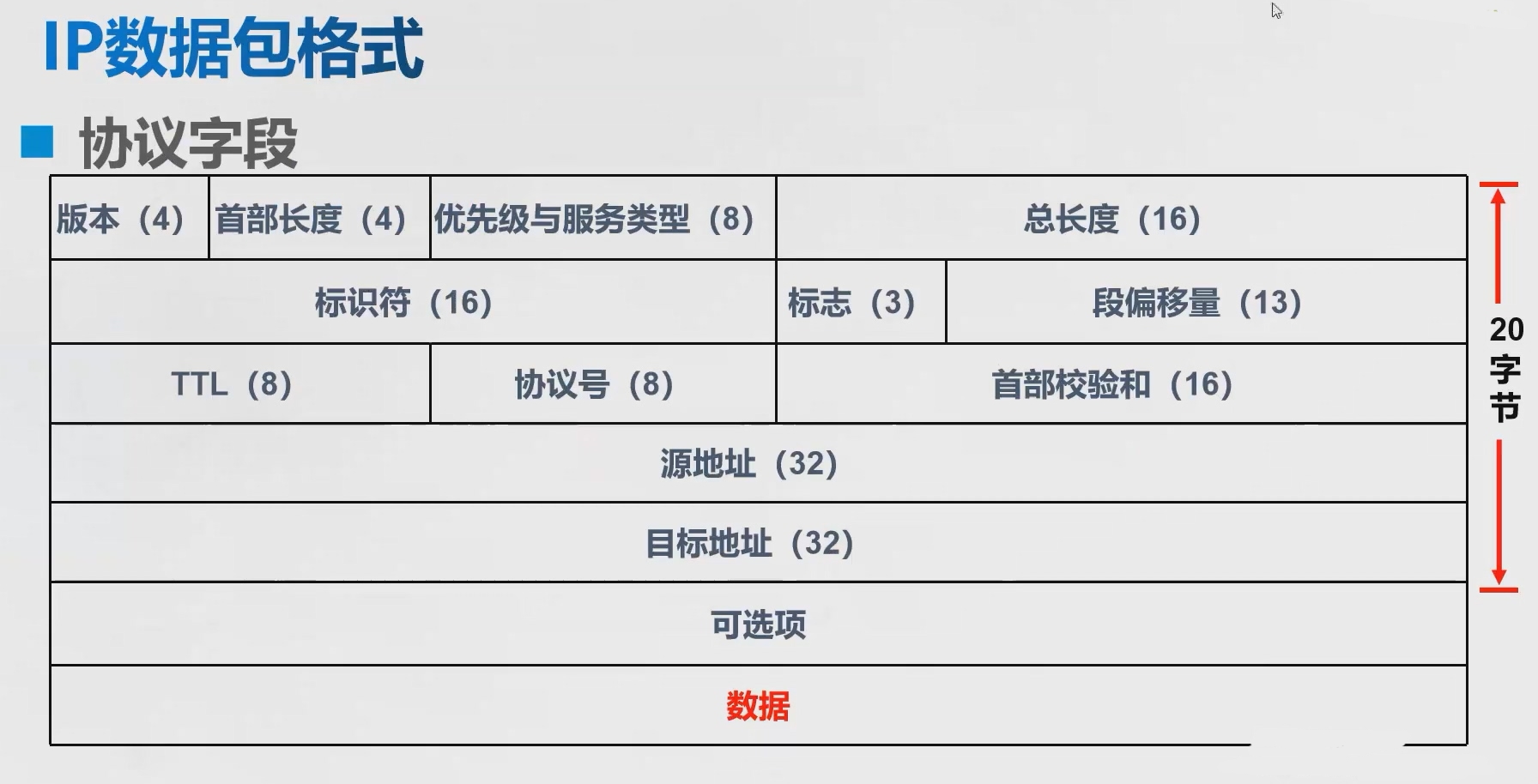
IP
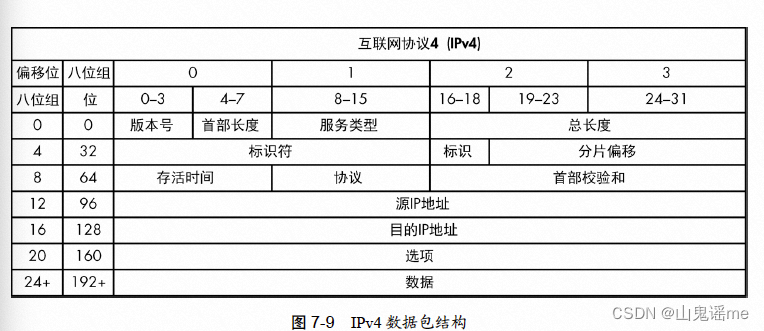
标识符(Identification):一个唯一的标识数字,用来识别一个数据包或者
被分片数据包的次序。
如果被分片,那么每个包的标识符都是相同的。
标识(Flags):用来标识一个数据包是否是一组分片数据包的一部分。
如果被分片,除去最后一个包外,其他都设置为1
分片偏移(Fragment Offset):一个数据包是一个分片,这个域中的值就会
被用来将数据包以正确的顺序重新组装。
分片后,这个记录的是除去IP头20字节的字节数。如果一个IP数据包最大1500,减去 20 = 1480字节。
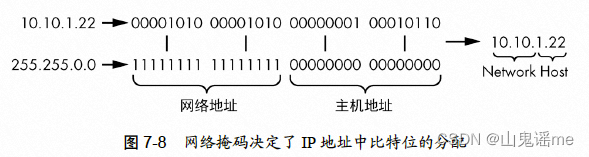
IP地址主要由两部分组成:网络地址 和 主机地址;共32位。
| 组成部分 | 作用 |
|---|---|
| 网络地址 | 用来标识设备所连接的局域网 |
| 主机地址 | 标识这个网络中的设备本身 |
但是IP地址,哪部分属于网络,哪部分属于主机没有明确的划分。所以需要用到网络掩码:
我们通常所关心的一个数据包的生存周期,只是其从源前往目的地所花去的时间。— TTL(存活时间)
为什么存活时间这么重要呢?如果没有存活时间,那么这个数据包会在网络中一直流转(相当于死循环),那么网络中可用的带宽就会减少,直到拒绝服务(Dos)的情况出现。IP头中的TTL就是为了防止这种事情发生。
IPv6
IPv6地址有128 位,可以提供2 的128 次方的地址空间.
TCP
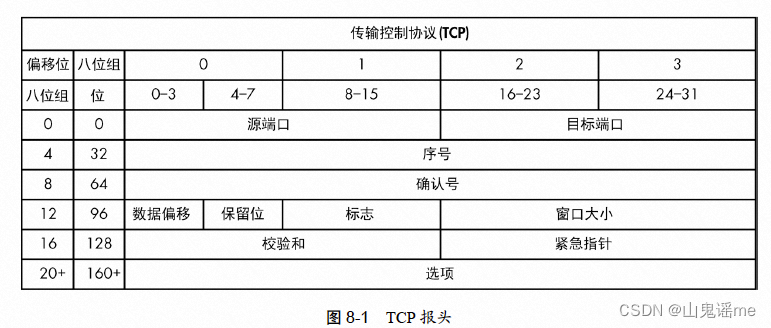
源端口(Source Port):用来传输数据包的端口。
目的端口(Destination Port):数据包将要被发送到的端口。
序号(Sequence Number):这个数字用来表示一个TCP 片段,这个域用来
保证数据流中的部分没有缺失。
确认号(Acknowledgment Number):这个数字是在通信中希望从另一个设
备中得到的下一个数据包的序号。
标志(Flags):URG ACK PSH RST SYN 和FIN 标志都用来表示所传输的
TCP 数据包的类型。
窗口大小(Window Size):TCP 接收者缓冲的字节大小。
校验和(Checksum):用来保证TCP 头和数据的内容在抵达目的地时的完
整性。
紧急指针(Urgent Pointer):如果设置了URG 位,则这个域将被检查作为额外的指令,告诉CPU 从数据包的哪里开始读取数据。
选项(Options):各种可选项,可以在TCP 数据包中进行指定。
端口
在使用TCP 进行通信的时候,我们有65535 个端口可供使用,并通常将这
些端口分成两个部分。
1~1023 是标准端口组(忽略掉被预留的0),特定服务会用到这些通常位
于标准端口分组中的标准端口。
1024~65535 是临时端口组(尽管一些操作系统对此有着不同的定义),当
一个服务想在任何时间使用端口进行通信的时候,现代操作系统都会随机地选
择一个源端口,让通信使用唯一源端口。这些源端口通常就位于临时端口组。
三次
第一次:SYN包
第二次:SYN/ACK包
第三次:ACK 包
四次
第一次:FIN/ACK 包
第二次:ACK包
第三次:FIN/ACK包
第四次:ACK包
异常情况
RST包:RST 标志用来指出连接被异常中止,或拒绝连接请求。
实战
实际数据包:以太网帧头 + IP数据报 + TCP/UDP数据包
或者:

HTTPS
HTTPS的数字证书验证原理
浏览器验证的过程:
- 浏览器向服务器发送请求,获取服务器数字证书。
- 首先从证书中得知证书的颁发机构,然后从浏览器系统中去寻找此颁发机构的根证书。
- 如果我们找到了证书颁发机构的根证书,那么就从根证书中取得那个根公钥,用根公钥去解密此证书的数字签名,成功解密的话就得到证书的指纹和指纹算法,指纹是证书内容通过指纹算法计算得到的一个hash值,这里我们称之为h1,h1代表证书的原始内容;然后用指纹算法对当前接收到的证书内容再进行一次hash计算得到另一个值h2,h2则代表当前证书的内容,如果此时h1和h2是相等的,就代表证书没有被修改过。如果证书被篡改过,h2和h1是不可能相同的,因为hash值具有唯一性,不同内容通过hash计算得到的值是不可能相同的。
TLS 层
SSL (Secure Sockets Layer)