1. HTTP报文格式
HTTP由请求和响应两部分组成,所以对应的也有两种报文格式。下面分别介绍HTTP请求报文格式和HTTP响应报文格式。
HTTP请求报文格式
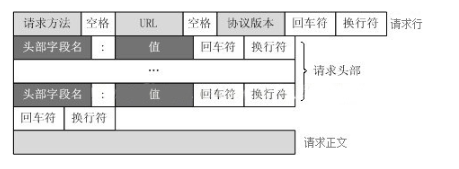
以上表格中,第1行为“请求行”,第2、3、4行为“请求头部”,第5行为空行,第6行为“请求正文”。分别介绍这4部分:
1.请求行:由3部分组成,分别为:请求方法、URL(见备注1)以及协议版本,之间由空格分隔,请求方法包括GET、POST等。协议版本的格式为:HTTP/主版本号.次版本号,常用的有HTTP/1.0和HTTP/1.1。
2.请求头部包含很多客户端环境以及请求正文的有用信息。请求头部由“关键字:值”对组成,每行一堆,关键字和值之间使用英文“:”分隔。
3.空行,这一行非常重要,必不可少。表示请求头部结束,下面就是请求正文。
4.请求正文:可选部分,比如GET请求就没有请求正文;POST比如以提交表单数据方式为请求正文。
HTTP响应报文格式:
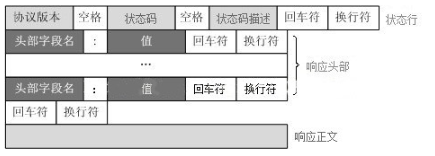
以上表格中,第1行为“状态行”,第2、3、4行为“响应头部”,第5行为空行,第6行为“响应正文”。下面分别介绍这4部分:
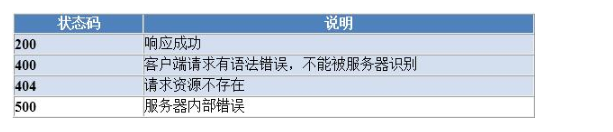
(1)状态行由由3部分组成,分别为:协议版本,状态码,状态码描述,之间由空格分隔。状态代码为3位数字,200~299的状态码表示成功,300~399的状态码指资源重定向,400~499的状态码指客户端请求出错,500~599的状态码指服务端出错(HTTP/1.1向协议中引入了信息性状态码,范围为100~199)。这里列举几个常见的:
(2)响应头部与请求头部类似,也包含了很多有用的信息。
(3)空行,这一行非常重要,必不可少。表示响应头部结束
(4)响应正文,服务器返回的文档,最常见的为HTML网页。
2. HTTP的头域
在HTTP的请求消息和应答消息中,都包含头域。头域分为4种,其中请求头域和应答头域分别只在请求消息和应答消息中出现,通用头域和实体头域在两种消息中都可以出现,但实体头域只有当消息中包含了实体数据时才会出现。下面分别介绍这4种头域中的域名城和功能。
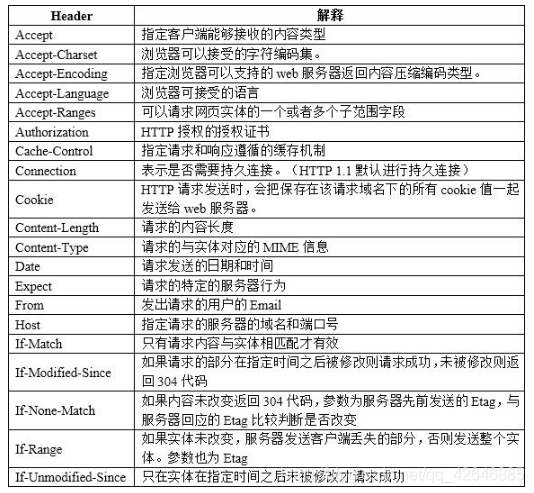
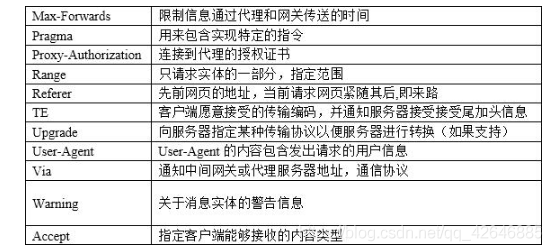
HTTP请求头域
应答头域只在应答消息中出现,是Web服务器向浏览器提供的一些状态和要求。如下
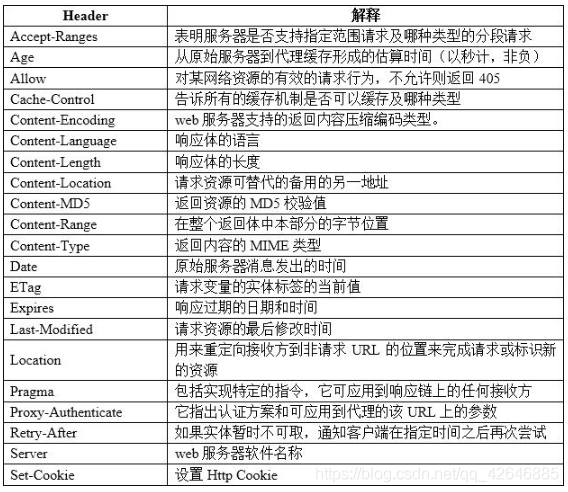
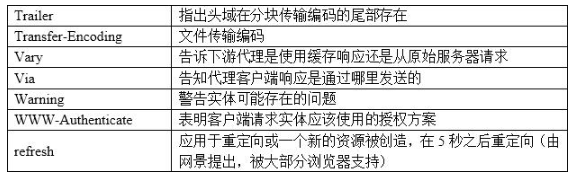
HTTP 应答头域
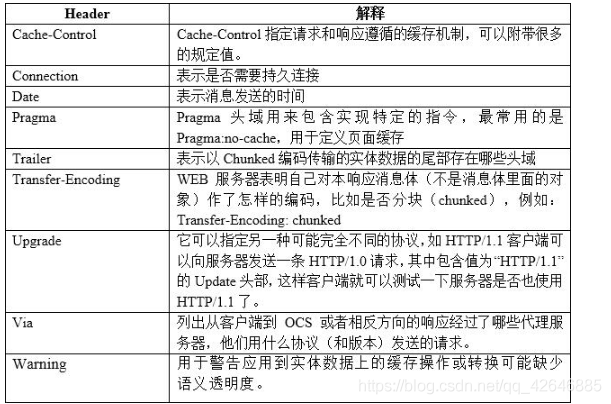
通用头域既可以用在请求消息中,也可以用在应答消息。
HTTP通用头域
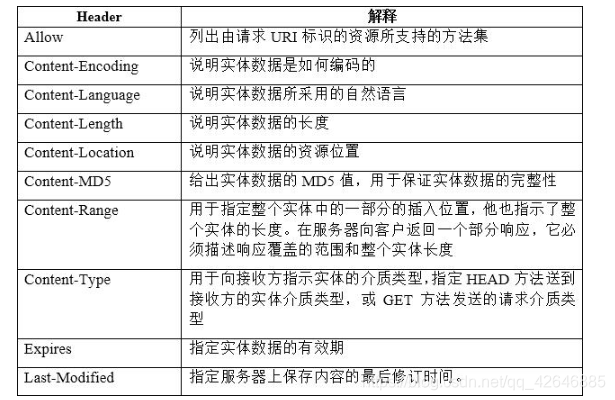
只有在请求和应答消息中包含实体数据时,才需要实体头域。请求消息中的实体数据是一些由浏览器向web服务器提交的数据,如在浏览器中采用POST方式提交表单时,浏览器就要把表单中的数据封装在请求消息的实体数据部分。应答消息中的实体数据是web服务器发给浏览器的媒体数据,如网页,图片和文档等。实体头域说明了实体数据的一些属性。如下表
HTTP实体头域