我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,在本系列的上一篇文章中介绍了如何让小车实现自动避障,本文作为本系列的第四篇文章,主要介绍蓝牙模块的使用,如何通过蓝牙进行数据传输,并通过手机向蓝牙模块发送指令,从而达到使用手机控制智能小车的运动状态,本文以汇承HC-08蓝牙模块为例。
本系列文章链接:
-----------------------------------------------------------------------------
详细介绍如何从零开始制作51单片机控制的智能小车(一)———让小车动起来
详细介绍如何从零开始制作51单片机控制的智能小车(二)———超声波模块、漫反射光电管、4路红外传感器的介绍和使用
详细介绍如何从零开始制作51单片机控制的智能小车(三)———用超声波模块和漫反射光电传感器实现小车的自动避障
详细介绍如何从零开始制作51单片机控制的智能小车(四)———通过蓝牙模块实现数据传输以及通过手机蓝牙实现对小车运动状态的控制
详细介绍如何从零开始制作51单片机控制的智能小车(五)———对本系列第四篇文章介绍的手机蓝牙遥控加减速异常的错误的介绍及纠正
-----------------------------------------------------------------------------
一、蓝牙模块的选择和基本设定
1、工作原理简单介绍

以上图片来自汇承官方用户手册,HC-08模块用于代替全双工通信时的物理连线。左边的设备向模块发送串口数据,模块的 RXD 端口收到串口数据后,自动将数据以无线电波的方式发送到空中。右边的模块能自动接收到,并从 TXD 还原最初 左边设备所发的串口数据。从右到左也是一样的。
2、测试模块是否正常工作,以及相关参数的设定
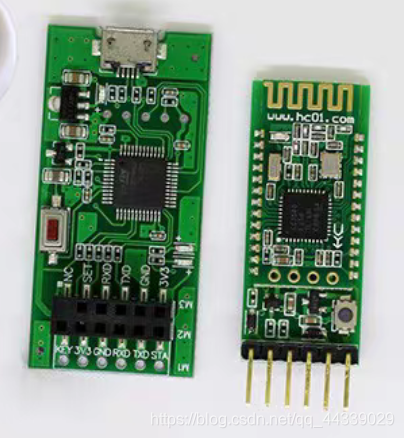
建议新手朋友们,购买新手套餐,上面左图是测试架,用来实现模块与电脑的连接,右图为本文介绍的HC-08蓝牙模块,只需要把蓝牙模块插到测试架上,通过安卓数据线,就可以与电脑相接了,通过HID 串口助手(汇承官网有HC-08资料包,内部包含相关辅助工具及详细的资料) ,向蓝牙发送AT,若返回OK,则模块正常工作
接着向蓝牙发送AT+RX 查看模块基本参数 ,主要关注两条信息,蓝牙是主机还是从机模式,设定的波特率是多少,默认出厂时是从机模式,波特率9600,恰好是本文我们需要的数值,若你单片机程序的通信波特率不是9600,可以通过HID 串口助手或者AT指令把蓝牙模块修改成你需要的波特率
3、蓝牙模块与单片机的连接,与手机的通信

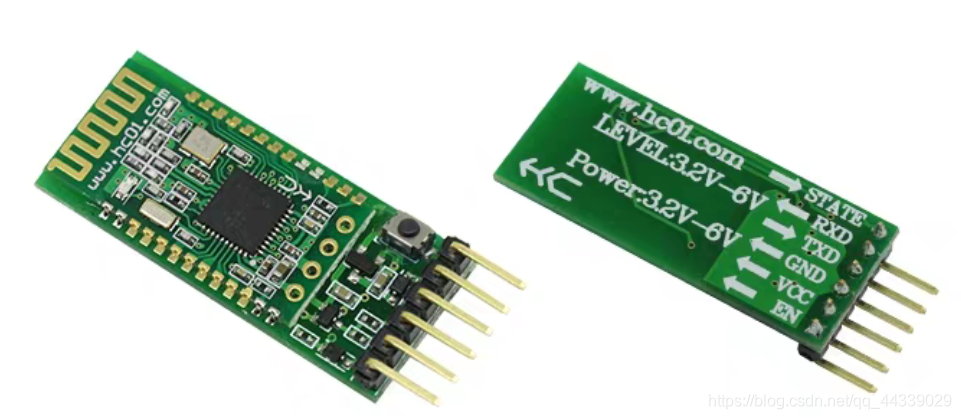
在这里需要确定你用的蓝牙模块的工作电压是多少,汇承HC-08有贴片装和带底板装两种,建议新手一定要买带底板的,如上图所示,可以省去很多麻烦。我们使用的51单片机供电电压是5v,而贴片装电压3.3v,不能直接与单片机连接,虽然本文介绍的这款单片机最小系统有3.3v的输出引脚,但是它串口TX RX依然是工作在5v电压下,而贴片装蓝牙模块的TX,RX需要工作在3.3v电压下,蓝牙模块的 RX 端需要串接一个 220Ω~1KΩ的电阻再接到单片机上,TX可以直接连接,对新手来说有点小麻烦,所以大家买的时候,直接买带底板的,支持3.2v-6v,也就是说带底板的可以直接与51单片机连接, 连接时只需要连4根线 Vcc连Vcc,GND连接GND,蓝牙模块TX接单片机 Rx (对于前文介绍的这款的单片机,RX为P30管脚,TX为P31管脚,如下图所示),蓝牙模块RX接单片机 Tx。

蓝牙模块不能直接与手机连接需要通过HC-COM这个app进行连接,给模块上电后,开启手机蓝牙功能,打开手机上的HC-COM,点击扫描设备,找到蓝牙模块进行连接,连接成功显示connected。
关于以上的第一部分,因为大家选择的蓝牙模块型号或者商家不同,会有一定的差异,在上文仅就本文需要用的地方进行了简单的介绍,蓝牙模块详细的用法步骤可以去看你购买的蓝牙的用户手册
二、蓝牙模块串口通信程序的编写以及蓝牙遥控的实现
1、与定时器相关函数的编写
我们知道我们使用STC89C52单片机,只有两个定时器,在前文我们用定时器0,来实现电机的PWM输出,定时器1,来触发溢出中断,用于超声波模块障碍物的检测,而现在我们用蓝牙进行无线串口的通信,也需要用定时器,怎么办呢? 定时器0肯定是不能动的,只能对定时器1进行复用,我们设定一个变量char Work_Mode=0; 进行工作模式的选择 为0时为手机或者电脑等上位机对小车进行蓝牙遥控 ,为1时小车自动避障模式,在一开始的时候,我们把它设为0,此时对定时器1初始化为蓝牙模块所需的工作模式,在我们需要转化成自动避障模式时,通过手机发送指令让Work_Mode变为1,此时我们把定时器1初始化为超声波避障所需的工作模式,由于此步是在while(1)循环中进行的,但是初始化只需要初始一次,不能一直初始化,所以需要再设定一个变量Work_Mode2,初始值设为0,当执行一次把定时器1初始化为超声波避障所需的工作模式的初始化后,就让该变量为1,这样就可以实现只初始化一次了,相关代码如下:
void Timer1Init() //定时器1设定为为自动避障模式所需的初始化
{TMOD=0X11;//选择为定时器1模式,工作方式1,仅用TR1打开启动。选择为定时器0模式,工作方式1,仅用TR1打开启动TH1=0; TL1=0; ET1=1;//打开定时器1中断允许EA=1;//打开总中断TR1=1;//打开定时器
}void Timer1Init2() //定时器1设定为为蓝牙遥控模式所需的初始化
{SCON=0X50; //设置为工作方式1,8位数据,可变波特率TMOD |=0X20; //设置计数器工作方式2PCON=0X00; //波特率不加倍TH1=0XFd; //计数器初始值设置,9600 @11.0592MHzTL1=0XFd;TR1=1; //打开计数器ES = 1; //开串口中断EA = 1; //开总中断
}
char Work_Mode=0; //工作模式的选择 为0时,为手机或者电脑等上位机对小车进行蓝牙遥控 ,为1时小车自动避障模式
char Work_Mode2=0;void main(){Timer0Init();Timer1Init2(); Left_Speed_Ratio=5; //设置左电机车速为最大车速的50%Right_Speed_Ratio=5; 设置右电机车速为最大车速的50%while(1){if(Work_Mode==1){ES=0; //关闭串口中断 if(Work_Mode2==0){Timer1Init();Work_Mode2=1;}if(Echo==1){TH1=0; TL1=0;TR1=1; //开启计数 while(Echo); //当RX为1计数并等待 TR1=0; //关闭计数 Conut(); //计算 }if(M_sensor==1){ run(); }else{if(L_sensor==1){ left(); }else if(R_sensor==1){ right() ; }else{ back(); }}}else{switch(receive_real_data) { case '1': run(); break; case '2': left(); break; case '3': right(); break; case '4': back(); break; case '5': Speed_add(); break; case '6': Speed_reduce(); break; case '7': stop(); break; case '8': Work_Mode=1; break; }LED=1;} }
}2、对上面的主函数的解释(蓝牙遥控的实现思路)
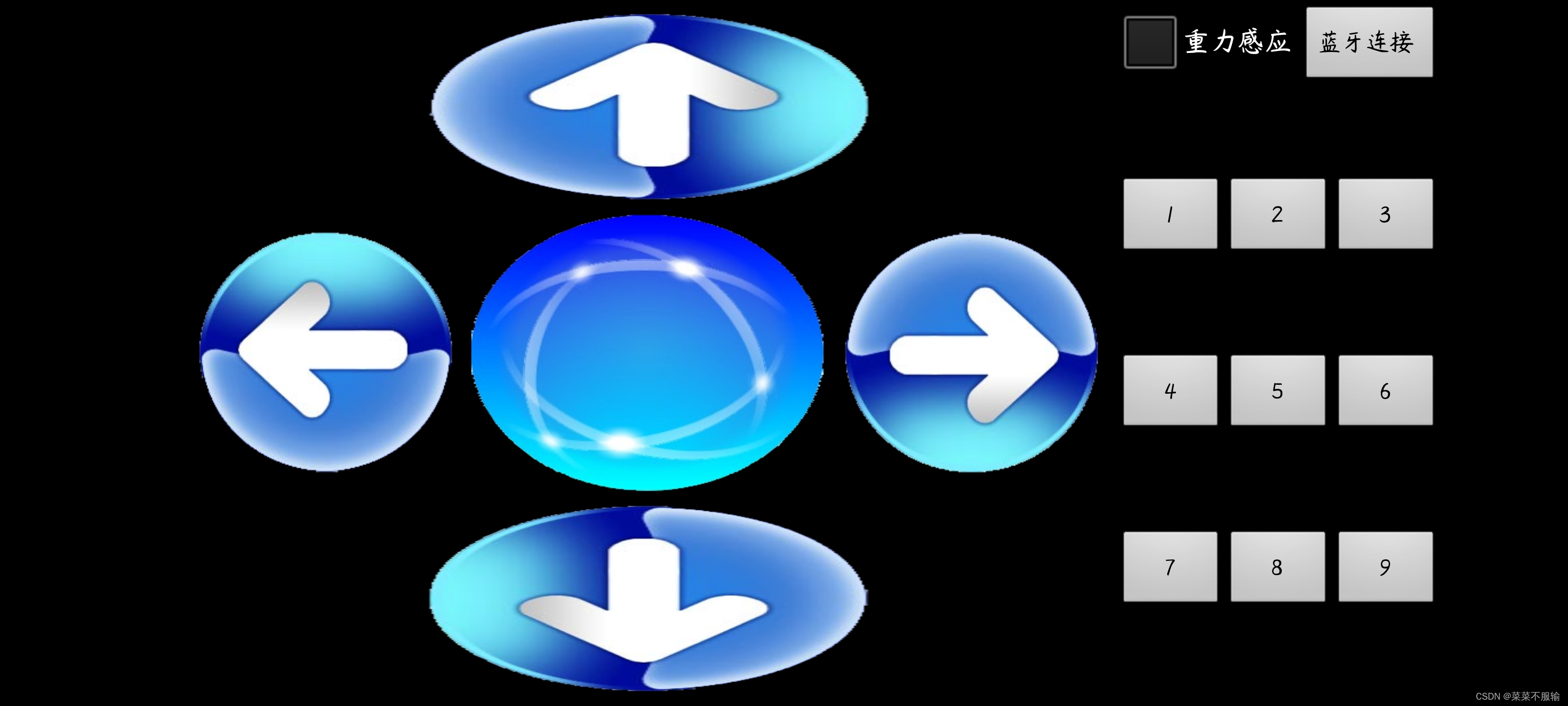
本篇文章的功能是在已经完成自动避障的基础上进行扩展的,也就是让小车可以具备自动避障和蓝牙遥控两种工作模式,所以当Work_Mode=1时的程序,也就是工作在自动避障模式的程序,在对定时器1完成设定为自动避障模式所需的初始化后,跟本系列第三篇文章介绍的是相同的,已详细介绍过了,在这就不介绍了,一开始的时候Work_Mode=0,工作在蓝牙遥控模式,我设定的功能如上面的主函数所示,当手机或者电脑或者其他上位机对单片机(通过蓝牙模块)发送1的时候,让小车前行。发送2的时候 让小车左转,发送3的时候让小车右转,发送4的时候,让小车后退,发送5的时候,让小车加速,发送6的时候让小车减速,发送7的时候,停车,发送8的时候,把Work_Mode置为1,使小车进入自动避障模式,此时蓝牙遥控失去作用,按下单片机上的复位键,程序将重新加载,重新进入蓝牙遥控模式。新增的加速减速函数如下:
void Speed_add() //加速函数
{if(Left_Speed_Ratio<10) //限幅{Left_Speed_Ratio++;Right_Speed_Ratio++; }
}void Speed_reduce() //减速函数
{if(Left_Speed_Ratio>0) //限幅{Left_Speed_Ratio--;Right_Speed_Ratio--; }
}
3、串口中断函数的编写
上面呢我们已经介绍了,通过发送一些设定好了的指令,实现蓝牙遥控,那么怎么把指令发送出去,以及单片机是如何实现接收的呢?,这就要通过串口中断来实现了,下面是官方给的一个串口中断的参考代码,是有问题的,对于HC-COM来说,是不能正常工作的
void Com_Int(void) interrupt 4
{uchar receive_data;EA = 0;if(RI == 1) //当硬件接收到一个数据时,RI会置位{ RI = 0;receive_data = SBUF;//接收到的数据if(receive_data == '1') {LED =0;//接收到1亮灯}else{LED =1; //其他情况灯灭}}SBUF=receive_data;//将接收到的数据放入到发送寄存器while(!TI); //等待发送数据完成TI=0; //清除发送完成标志位 EA = 1;
}
按照上面的代码,当我们利用手机上的app HC-COM向单片机发送1的的时候,接收的数据receive_data=1,此时呢LED应该等于0,也就是LED会被点亮,但是实际上它只会闪一下,这就说明,我们通过HC-COM发送1的时候,单片机先接收到我们发的1,之后又接收到其他的信息,在上面的程序中,我们让单片机把接收到的信息又通过蓝牙模块发送给手机,利用HC-COM进行显示,如下图所示:
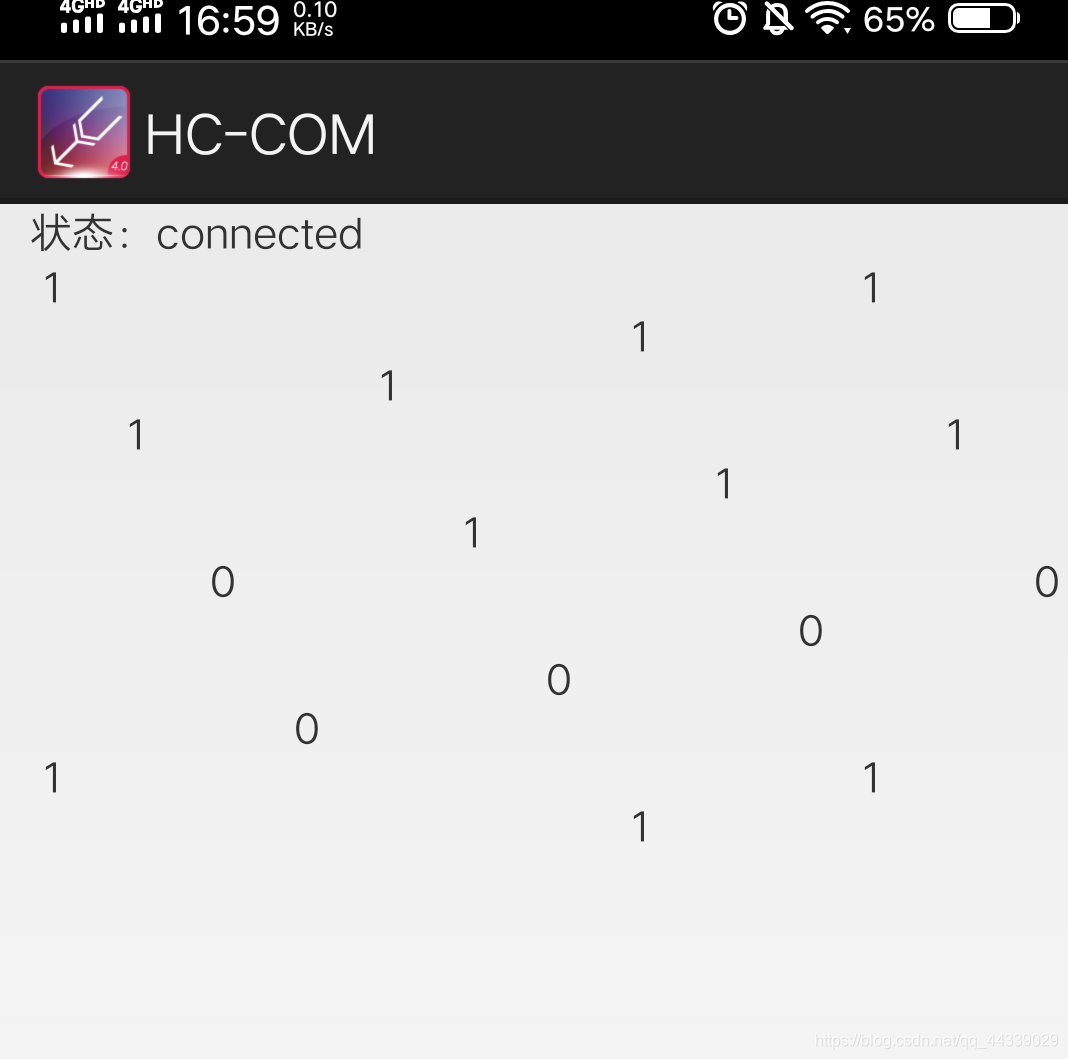
乍一看,我们发送1的时候,只返回了一个1 ,发送0的时候,只返回了一个0,那单片机接收的其他信息是从何而来的呢?,为啥手机没有显示返回的其他信息呢?对此我进行了大量的实验,最终发现这个app,它一次发送实际上是发送20位,什么意思呢? 当我们输入一个1点击发送的时候,它实际上发送的是1000 0000 0000 0000 0000,也就是说当我们输入的数据的位数不足20位时它会自动补零,这就解释了为什么LED灯不会常亮,只会闪一下,因为在接收完我们发送的1后,它又接收了19个0,把这20个数据返回我们手机上的时候,它这个app把它补得这19个0又以空格的格式进行显示,而不是显示0(有点坑)。
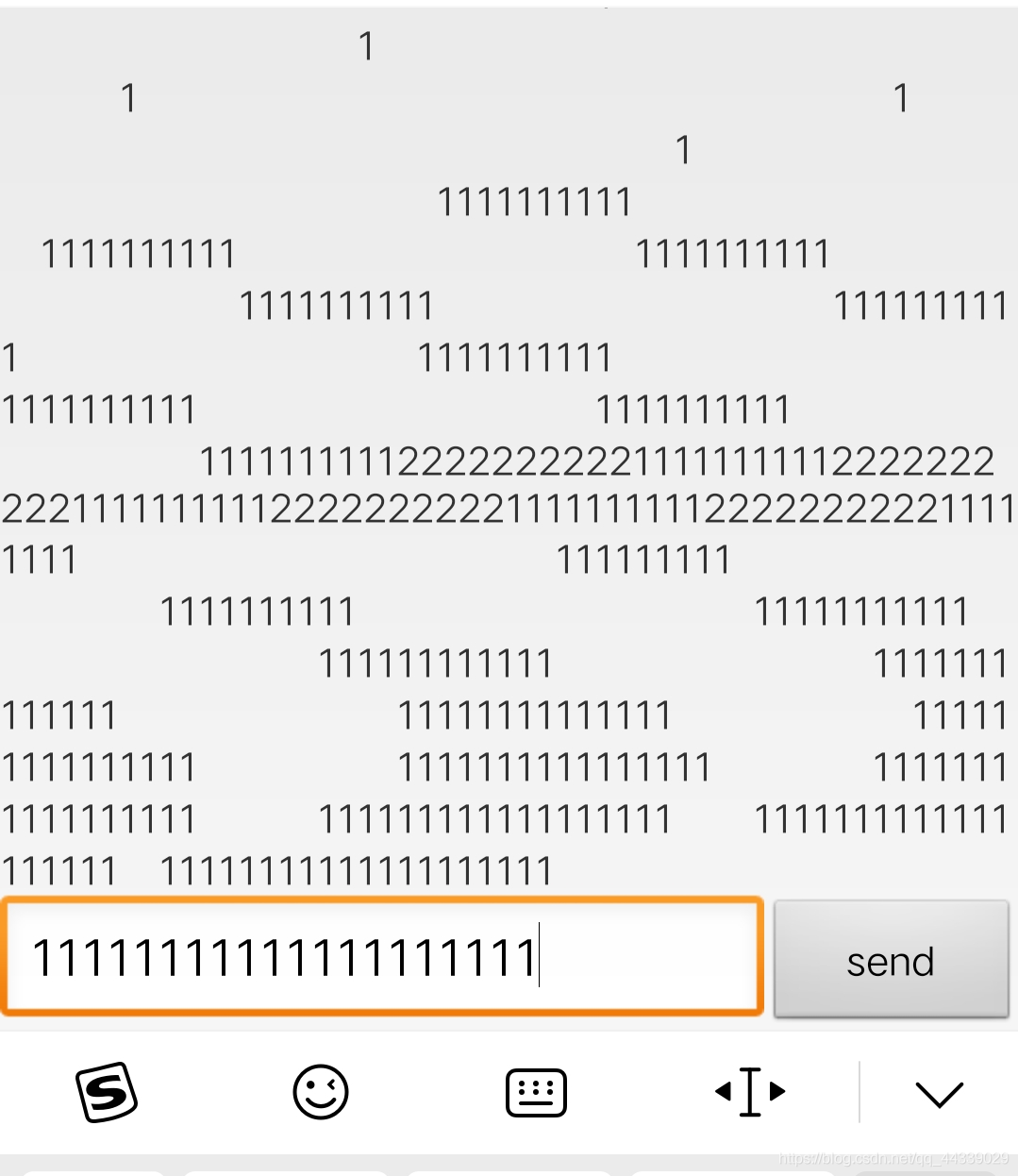
为了让LED常亮,我们需要输入20个1,如上图所示,也就是不给它补零的机会。这种方法呢用起来十分的不方便,而且本文我们要通过HC-COM发送指令,实现对小车的遥控,也就说需要我们快速的输入指令,这种方法是不行的,怎么办呢?,对大部分人了说不具备修改这个app的能力,那么只能修改单片机的接收和发送函数了,因此我把上面的串口中断函数进行了简单的修改,如下:
void Com_Int(void) interrupt 4
{EA = 0; if(RI == 1) //当硬件接收到一个数据时,RI会置位{ LED=0;RI = 0;receive_data = SBUF;//接收到的数据if(receive_data!=0)receive_real_data=receive_data;SBUF=receive_real_data;//将接收到的数据放入到发送寄存器while(!TI); //等待发送数据完成TI=0; //清除发送完成标志位}EA = 1;
}
只有接收到的数据不为0时,才赋值给新的变量receive_real_data,我们通过判断receive_real_data的值,来控制小车,而不是直接用接收到的值receive _data,同样我们返回到手机的数据,也改为receive_real_data。这样我们只需要发送一位的 1、2、3、4、5、6、7、8、等就可以对小车进行控制,用起来很方便。
三、各文件完整的程序代码
1、main.c文件
#include <car.h>extern unsigned char Left_Speed_Ratio;
extern unsigned char Right_Speed_Ratio;
unsigned int time=0;
unsigned int HC_SR04_time=0;
extern unsigned char pwm_val_left;
extern unsigned char pwm_val_right;bit flag =0;
extern char M_sensor;
char Work_Mode=0; //工作模式的选择 为0时,为手机或者电脑等上位机对小车进行蓝牙遥控 ,为1时小车自动避障模式
char Work_Mode2=0;
unsigned char receive_data=0;
unsigned char receive_real_data=0;
void delay1s(void)
{unsigned char a,b,c;for(c=167;c>0;c--)for(b=171;b>0;b--)for(a=16;a>0;a--);_nop_();
}
void delay1ms(void)
{unsigned char a,b,c;for(c=1;c>0;c--)for(b=142;b>0;b--)for(a=2;a>0;a--);
}void Timer0Init()
{TMOD|=0X01;//选择为定时器0模式,工作方式1,仅用TR0打开启动。TH0=0XFC; //给定时器赋初值,定时1msTL0=0X18; ET0=1;//打开定时器0中断允许EA=1;//打开总中断TR0=1;//打开定时器
}void Timer1Init()
{TMOD=0X11;//选择为定时器1模式,工作方式1,仅用TR1打开启动。选择为定时器0模式,工作方式1,仅用TR1打开启动TH1=0; TL1=0; ET1=1;//打开定时器1中断允许EA=1;//打开总中断TR1=1;//打开定时器
}void Timer1Init2()
{SCON=0X50; //设置为工作方式1,8位数据,可变波特率TMOD |=0X20; //设置计数器工作方式2PCON=0X00; //波特率不加倍TH1=0XFd; //计数器初始值设置,9600 @11.0592MHzTL1=0XFd;TR1=1; //打开计数器ES = 1; //开串口中断EA = 1; //开总中断
}void timer0()interrupt 1 using 2
{
TH0=0XFC; //给定时器赋初值,定时1ms
TL0=0X18;
time++;
pwm_val_left++;
pwm_val_right++;
pwm_out_left_moto();
pwm_out_right_moto(); HC_SR04_time++;
if(HC_SR04_time>=500) //500ms 启动一次超声波测距
{HC_SR04_time=0;StartModule();
}
} void Timer1() interrupt 3
{flag=1; //若定时器1溢出则flag置1
}void Com_Int(void) interrupt 4
{EA = 0; if(RI == 1) //当硬件接收到一个数据时,RI会置位{ LED=0;RI = 0;receive_data = SBUF;//接收到的数据if(receive_data!=0)receive_real_data=receive_data;SBUF=receive_real_data;//将接收到的数据放入到发送寄存器while(!TI); //等待发送数据完成TI=0; //清除发送完成标志位}EA = 1;
}void main(){Timer0Init();Timer1Init2(); Left_Speed_Ratio=5; //设置左电机车速为最大车速的50%Right_Speed_Ratio=5; 设置右电机车速为最大车速的50%while(1){if(Work_Mode==1){ES=0; //关闭串口中断if(Work_Mode2==0){Timer1Init();Work_Mode2=1;}if(Echo==1){TH1=0; TL1=0;TR1=1; //开启计数 while(Echo); //当RX为1计数并等待 TR1=0; //关闭计数 Conut(); //计算 }if(M_sensor==1){ run(); }else{if(L_sensor==1){ left(); }else if(R_sensor==1){ right() ; }else{ back(); }}}else{switch(receive_real_data) { case '1': run(); break; case '2': left(); break; case '3': right(); break; case '4': back(); break; case '5': Speed_add(); break; case '6': Speed_reduce(); break; case '7': stop(); break; case '8': Work_Mode=1; break; }LED=1;} }
}2、motor_control.c文件
#include <car.h>unsigned char pwm_val_left =0;
unsigned char push_val_left =0;
unsigned char pwm_val_right =0;
unsigned char push_val_right=0;
unsigned char Left_Speed_Ratio;
unsigned char Right_Speed_Ratio;bit Left_moto_stop =1;
bit Right_moto_stop =1;void Left_moto_go() //左电机正转
{p34=0;p35=1;}
void Left_moto_back() //左电机反转
{p34=1;p35=0;}
void Left_moto_stp() //左电机停转{p34=1;p35=1;}
void Right_moto_go() //右电机正转
{p36=0;p37=1;}
void Right_moto_back() //右电机反转
{p36=1;p37=0;}
void Right_moto_stp() //右电机停转
{p36=1;p37=1;} void pwm_out_left_moto(void) //左电机PWM
{
if(Left_moto_stop)
{
if(pwm_val_left<=push_val_left)
Left_moto_pwm=1;
else
Left_moto_pwm=0;
if(pwm_val_left>=10)
pwm_val_left=0;
}
else
Left_moto_pwm=0;
} void pwm_out_right_moto(void) //右电机PWM
{
if(Right_moto_stop)
{
if(pwm_val_right<=push_val_right)
Right_moto_pwm=1;
else
Right_moto_pwm=0;
if(pwm_val_right>=10)
pwm_val_right=0;
}
else
Right_moto_pwm=0;
} void run(void) //小车前行
{
push_val_left =Left_Speed_Ratio;
push_val_right =Right_Speed_Ratio;
Left_moto_go();
Right_moto_go(); } void back(void) //小车后退
{
push_val_left =Left_Speed_Ratio;
push_val_right =Right_Speed_Ratio;
Left_moto_back();
Right_moto_back();} void left(void) //小车左转
{
push_val_left =Left_Speed_Ratio;
push_val_right =Right_Speed_Ratio;
Right_moto_go();
Left_moto_back();
} void right(void) //小车右转
{
push_val_left =Left_Speed_Ratio;
push_val_right =Right_Speed_Ratio;
Right_moto_back();
Left_moto_go();
} void stop(void) //小车停止
{
push_val_left =Left_Speed_Ratio;
push_val_right =Right_Speed_Ratio;
Left_moto_stp();
Right_moto_stp();} void rotate(void) //小车原地转圈
{
push_val_left =Left_Speed_Ratio;
push_val_right =Right_Speed_Ratio;
Left_moto_back();
Right_moto_go();} void Speed_add() //加速函数
{if(Left_Speed_Ratio<10){Left_Speed_Ratio++;Right_Speed_Ratio++; }
}void Speed_reduce() //减速函数
{if(Left_Speed_Ratio>0){Left_Speed_Ratio--;Right_Speed_Ratio--; }
}3、HC_SR04.c文件
#include <car.h>float S=0;
extern bit flag;
unsigned int measure_time;
char M_sensor; void StartModule() //启动超声波模块{Trig=1; _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_();_nop_(); _nop_(); _nop_(); _nop_();Trig=0;}void Conut(void){measure_time=TH1*256+TL1;TH1=0;TL1=0;S=(measure_time*1.87)/100; //算出来是CMif( flag==1||S>50||S<2) //超出测量{flag=0;LED=1;M_sensor=1;}else{LED=0;M_sensor=0;}} 4、car.h文件
#ifndef __car_H
#define __car_H#include <reg52.h>
#include <intrins.h>sbit Left_moto_pwm=P1^6 ;
sbit Right_moto_pwm=P1^7;
sbit p34=P3^4;
sbit p35=P3^5;
sbit p36=P3^6;
sbit p37=P3^7;
sbit Trig= P1^4; //产生脉冲引脚
sbit Echo= P1^5; //回波引脚
sbit LED=P0^0;
sbit L_sensor=P2^0;
sbit R_sensor=P2^1;
void Left_moto_go() ;
void Left_moto_back() ;
void Left_moto_stp() ;
void Right_moto_go();
void Right_moto_back();
void Right_moto_stp();
void delay(unsigned int k) ;
void delay1s(void) ;
void delay1ms(void);
void pwm_out_left_moto(void) ;
void pwm_out_right_moto(void);
void run(void);
void back(void);
void left(void);
void right(void);
void stop(void);
void rotate(void);
void StartModule() ;
void Timer1Init();
void Timer0Init();
void Conut(void);
void Timer1Init2();
void Speed_add() ;
void Speed_reduce();#endif
四、控制效果的视频演示
手机蓝牙控制效果视频展示链接
或者直接访问如下网址:https://www.bilibili.com/video/bv1t54y1Q7zF
五、智能小车的一些优化方向及思路
到这里本系列文章就要告一段落了,本系列的四篇文章介绍了,如何从零开始,慢慢的,一步步的实现了,一个51单片机控制的一个具备自动避障和蓝牙遥控双工作模式的一个小车,本来还想利用本系列第五篇文章介绍一下如何利用上位机对小车的一些变量,比如速度的大小、各个传感器是否检测到障碍物、小车的运动状态,进行监控,并将其绘制成图像,进行分析,但是之后的一段时间我会比较忙,就先不进行详细介绍了,怎么实现呢?有兴趣的可以看一下下面这篇博文,链接如下:
详细介绍如何从0开始写一个数据通信,将数据从单片机发送到上位机(或者虚拟示波器)进行数据或图像显示,以及常见问题或注意事项解答,本文主要以匿名上位机为例,适合新手和小白
上面这篇文章介绍的很详细,大家照着去实现上面的功能应该不难,除此之外,在本系列的第三篇文章介绍了,这个智能小车在检测前面的障碍上尚有不足,有兴趣的可以尝试一下4个漫反射光电传感器+超声波模块的避障方案。
本文介绍的内容,已经实现了手机跟单片机之间双向的数据传输,主要用的是手机向单片机发送控制指令,单片机返回发送的指令,其实除了发送控制指令,还可以发送查询指令,比如说我们向单片机发送一个9,单片机接收到9之后,不对小车的运动进行控制,返回的值也不让它返回9,我们可以让它返回当前小车的运动信息,比如当前的车速、各传感器的工作状态、小车的运动状态等等
当然还有很多的优化方案及思路,大家可以自行进行思考,和继续优化,当大家感觉研究的差不多之后,就可以研究一下更高级的车了,无论是从硬件上,还是控制算法上都有非常大的提升空间,毕竟本文介绍的只是一个先手入门级的小车模型
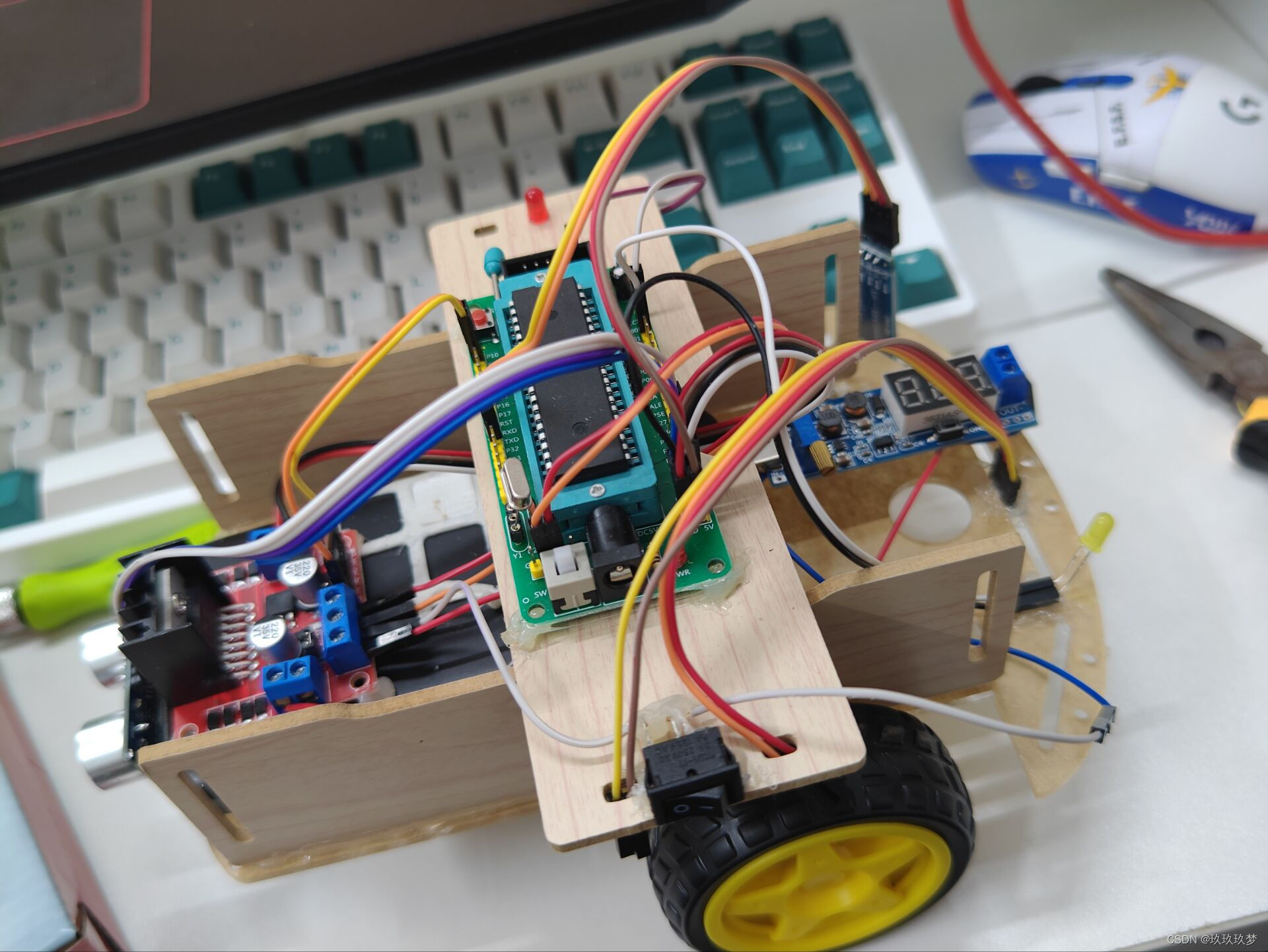
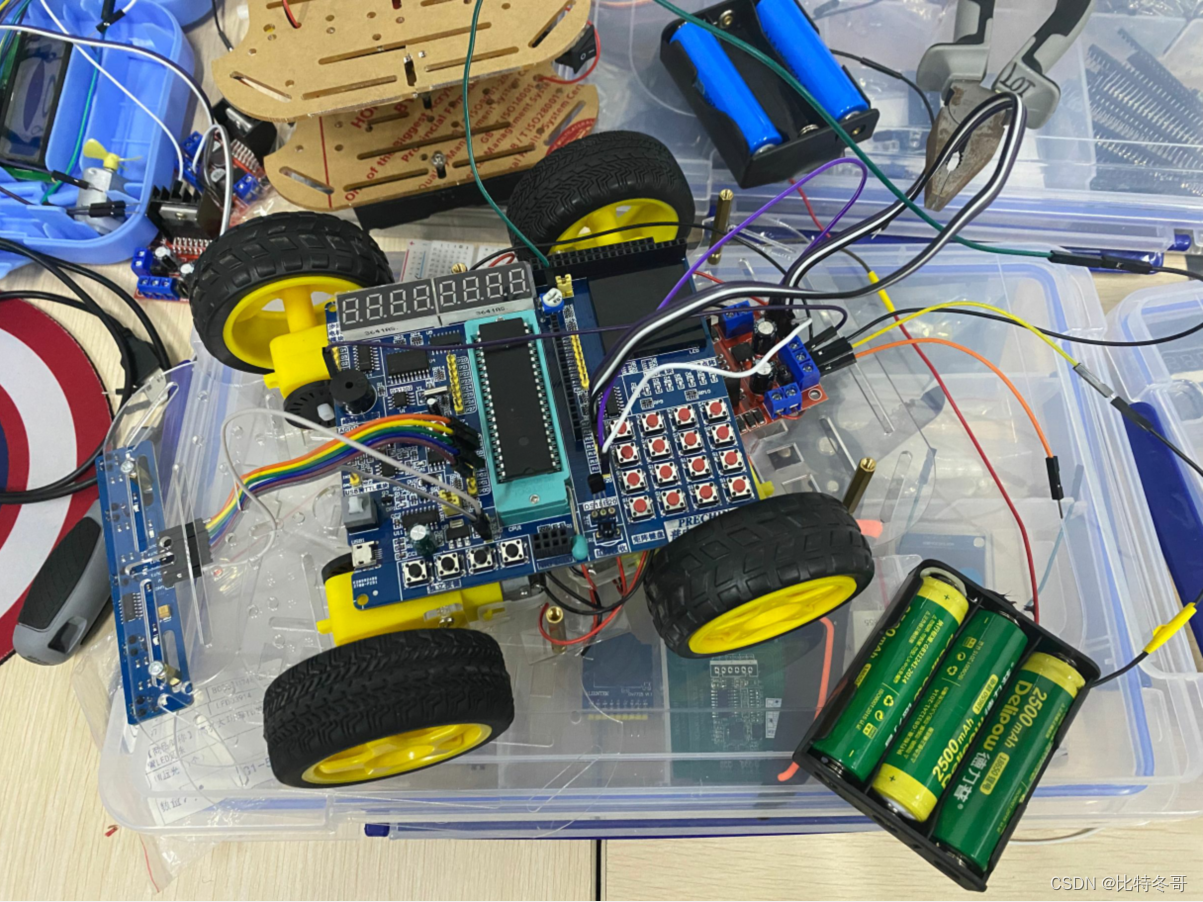
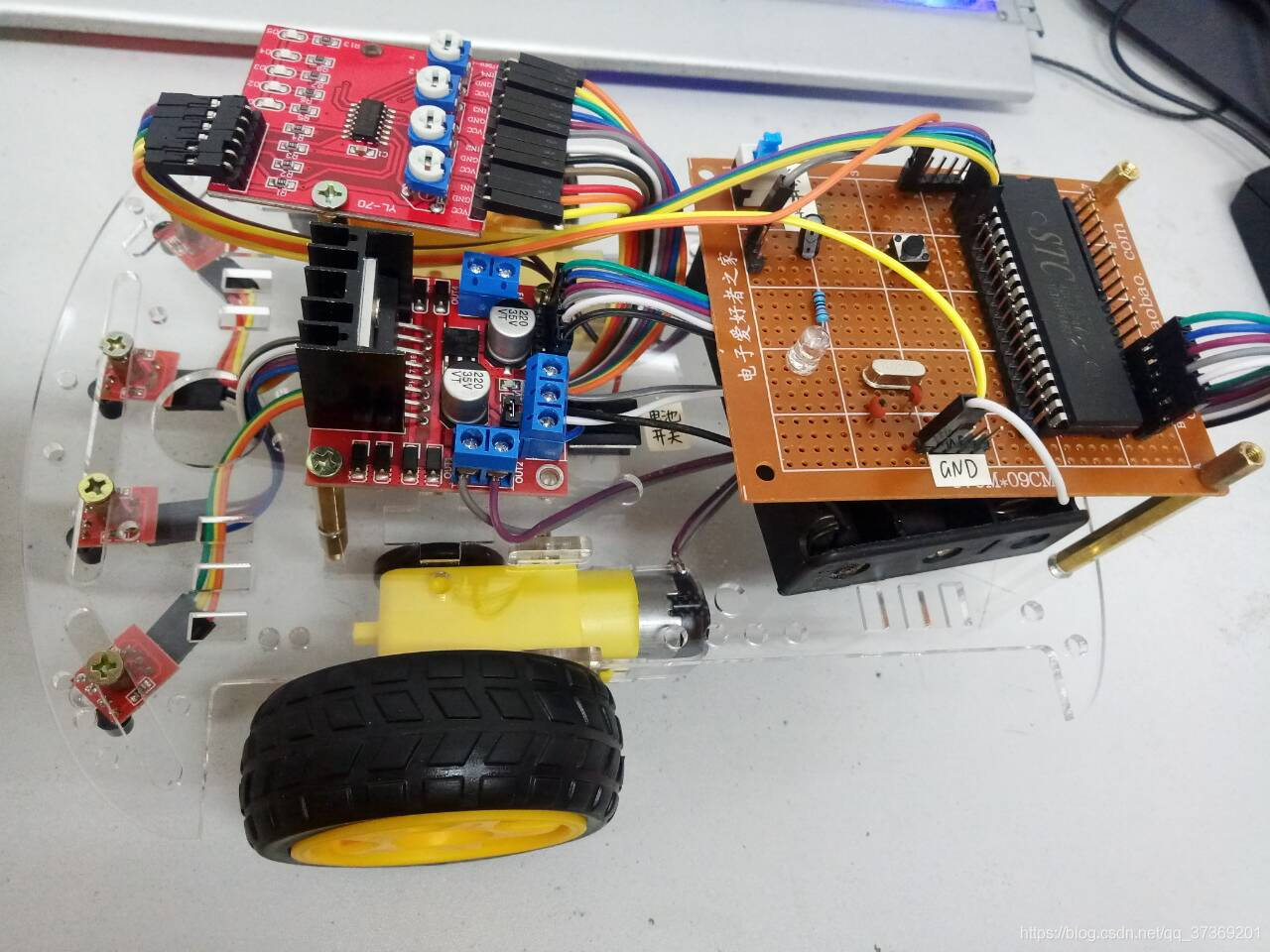
附小车照片:
本文介绍的内容的完整代码的keil文件和蓝牙HC—08模块的资料包(包括HC-COM这个app在内)我会放到附件里,还是那句话,我放的时候都是免费的,但是它会自己涨,需要的可以评论区留言,我直接发给你
欢迎大家积极交流,本文未经允许谢绝转载