# 基于51单片机的循迹小车(详细讲解+源码)
作为一名学生,这里我就简单谈谈我们小组做这个循迹小车的一个过程。主要是实现小车寻黑线行驶的这样一个功能,速度可以调节(定时器中断模拟PWM波实现)
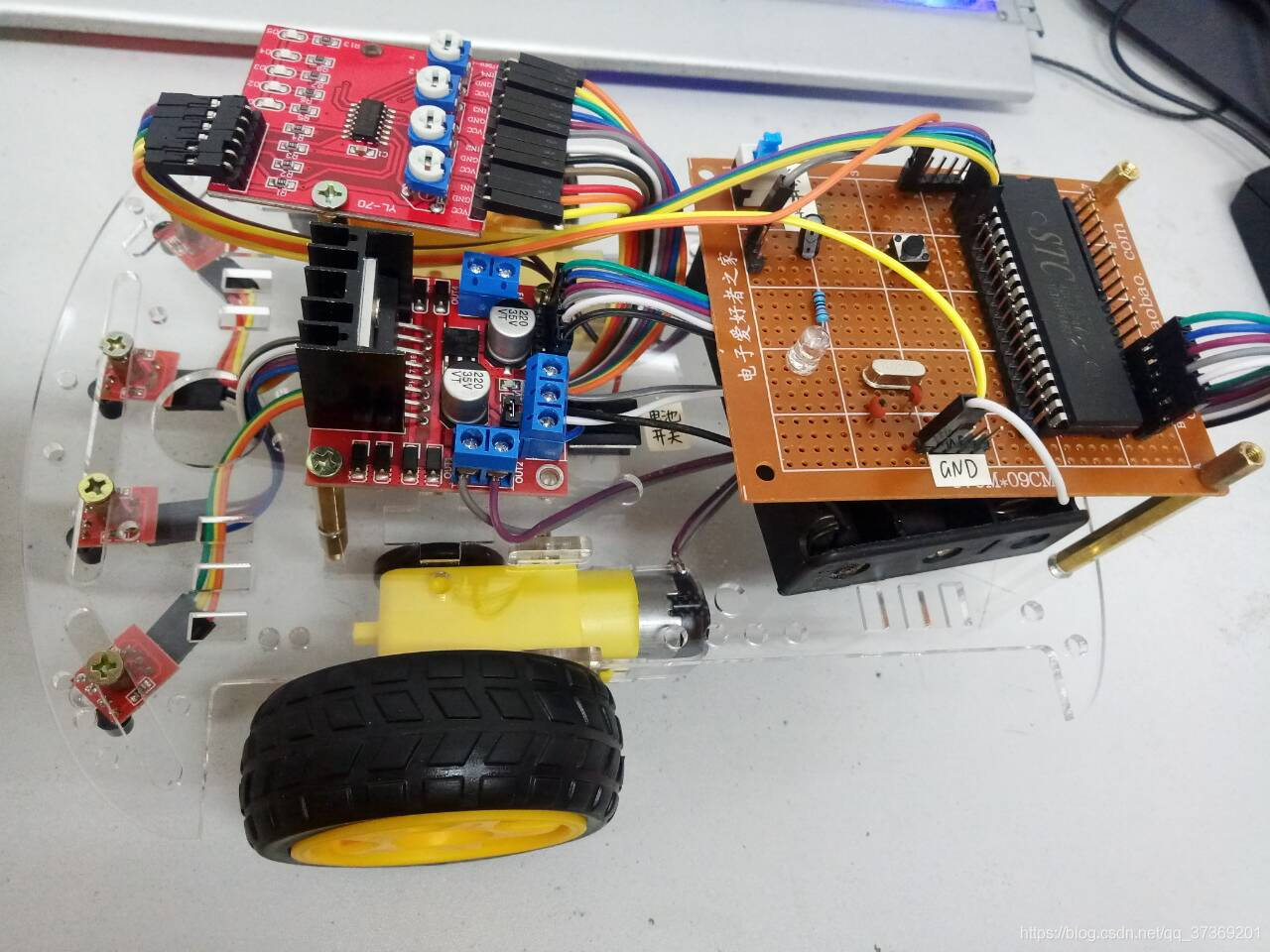
一丶硬件部分
小车的主体框架是一个三轮的外在形态
电源:采用2S可充电锂电池作为主电源供给(主要是给驱动供电)
传感器:采用灰度传感器(2个)
灰度传感器工作原理很简单,下面有介绍。它和单片机之间的联系体现在:两个灰度传感器的信号输出端DO 分别接单片机的两个引脚,根据它们检测到的值的不同情况(即0,1两种取值,两两组合共4种情况)进而确定小车前进的方向。
驱动:采用的是L298N芯片,一片L298N可以控制两个直流电机,进而驱动两个后轮。关于这个芯片,网上有很多的用户手册,可以去搜索查看,这里我就简单说说他的用法:前面蓝色的3插口是外接电源供电用的,左右两个蓝色的2插口是输出,连接电机,逻辑输入引脚IN1-IN4 接单片机引脚(单片机与驱动的联系也就在这,单片机控制IN1~IN4进而控制小车两个轮子的正转和反转),IN1-IN4旁边的两路输入ENA和ENB分别对应控制左右两路输出(接单片机引脚,通过定时器调节来输出PWM波,实现小车转弯)


控制系统:小车采用了51单片机最小系统,主控芯片选择的是STC89C52RC

另外:亚克力板(车子底板),防滑车轮x2,万向轮x1,杜邦线若干
工作原理简介
传感器:灰度传感器有两个检测灯,一个灯用于发射光,根据不同颜色的地面对光的吸收程度不同进而反射光强度肯定也不同,另一个灯则用于检测反射光的强度来判断是否检测到黑线。
若检测到黑线则输出低电平(0);信号灯熄灭;没检测到黑线则为高电平,信号灯点亮。(电源指示灯是一直亮着的)

二丶 工作流程
左右两个灰度传感器对地面进行检测,单片机(STC89C52)根据测量值的不同情况组合判断小车的前进方向,同时通过驱动(L298N)来控制小车的运动情况。
几点注意:
1.传感器需要外接电源供电,这里我们直接使用的51单片机的5V输出电压供电
2.驱动芯片L298N也需要外接电源,这里我们使用的2s可充电锂电池连接的芯片的12V电源输入端
3.单片机也需要外接电源供电,这里我们直接连接的L298N的5V电源供电端,因为L298N已经外接了一个12V电源,所以我们直接使用它的5V电源供电端
4.小车各个模块的连线可以参考这个视频:(引用)寻迹小车连线,所谓"拼车"
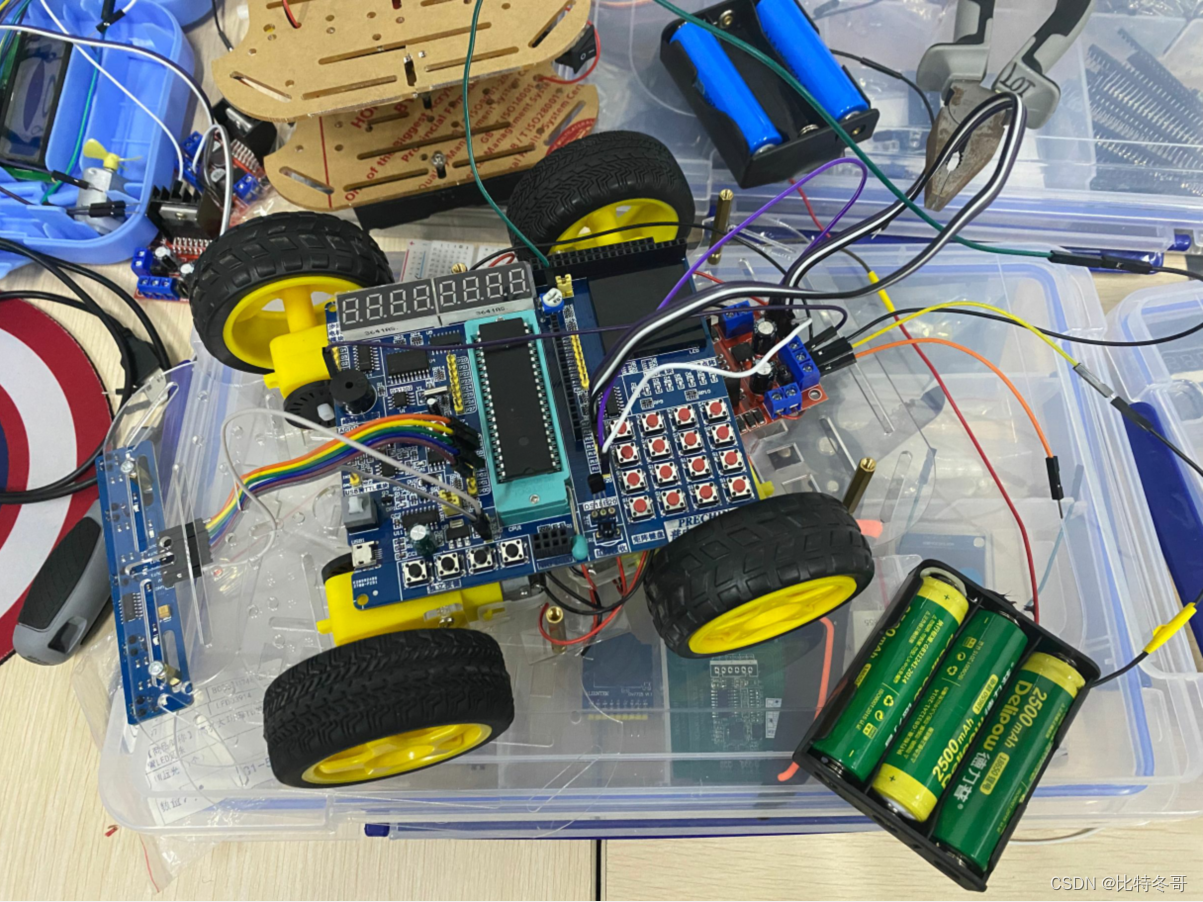
5.最终小车的图片( ‘线’ 场一片混乱 )

三丶源码
#include<reg52.h> typedef unsigned int uint;
typedef unsigned char uchar;uchar Duty_left,Duty_right; //左右占空比标志,取1-100
uchar i=0,j=0;
uchar flag; //用于循迹方向的判断//驱动L298N---->
//ENA,ENB为使能端; ENA,1,2和ENB,3,4分别控制一个电机;
sbit IN1 = P1^0;
sbit IN2 = P1^1;
sbit IN3 = P1^2;
sbit IN4 = P1^3;
sbit ENA = P1^6;
sbit ENB = P1^7;sbit left=P3^2; //左右两个灰度传感器
sbit right=P3^3;//小车直行速度赋值
void forward_move()
{Duty_left=20;Duty_right=12;IN1=1; //两个电机均正转IN2=0; IN3=1;IN4=0;
}//小车停止
void stop()
{ Duty_left=0;Duty_right=0;IN1=0;IN2=0;IN3=0;IN4=0;
}//小车左转速度赋值(用于左边传感器检测到黑线)
void Left_turning()
{Duty_left=18;Duty_right=20;IN1=1; //两个电机一个正转一个反转(或者一个正转一个不转) IN2=0;IN3=0; IN4=1;
}//小车右转速度赋值(用于右边传感器检测到黑线)
void Right_turning()
{Duty_left=18;Duty_right=20;IN1=0; IN2=1;IN3=1; IN4=0 ;
}//定时器0中断初始化
void timer0init()
{TMOD|=0x01;//定时器T0, 工作方式1, 16位TH0=0xff;//定时 ff9c 0.1msTL0=0x9c;EA=1; //开启总中断ET0=1;//开启中断允许TR0=1;//开启定时器中断
}//定时器中断服务函数
void timer0() interrupt 1
{TH0=0xff;TL0=0x9c;i++;j++;if(i<=Duty_left)//设置左轮占空比,即左轮速度ENA=1;elseENA=0;if(j<=Duty_right)ENB=1;elseENB=0;if(i==100) //设置pwm周期=0.1ms*100=10ms,这样开头定义的变量正好表示占空比数值{i=0;//加到100后变为0,重新计数}if(j==100){j=0;}
}//循迹模块
void xunji()
{ if((left==0)&&(right==1)){flag = 0;//左边检测到黑线}else if((left==1)&&(right==0)){flag = 1;//右边检测到黑线}else if((left==1)&&(right==1)){flag = 3; //两边都没检测到黑线}else{flag = 4;}switch(flag){case 0: Right_turning();break;case 1: Left_turning();break;case 3: forward_move();break;case 4: forward_move();break;default: forward_move();break;}
}
void main()
{timer0init();//forward_move();while(1){xunji();}
}
六丶最后
最后关于那个定时器中断模拟PWM波调速,我谈谈我的理解:
这里,小车的速度调节通过调节程序里定义的占空比变量的值(Duty_left,Duty_right)。例如,值为x就表示占空比为x%,占空比就是指一个周期内高电平持续时间占整个周期的比值,这里是调节占空比变量的值来控制EN的持续时间进而改变其速度。