导航功能包入门1
注意:
- 再学习本系列教程时,应该已经安装过ROS了并且需要有一些ROS的基本知识
为了能和读者进一步讨论问题,建立了一个微信群,方便给大家解答问题,也可以一起讨论问题。
加群链接
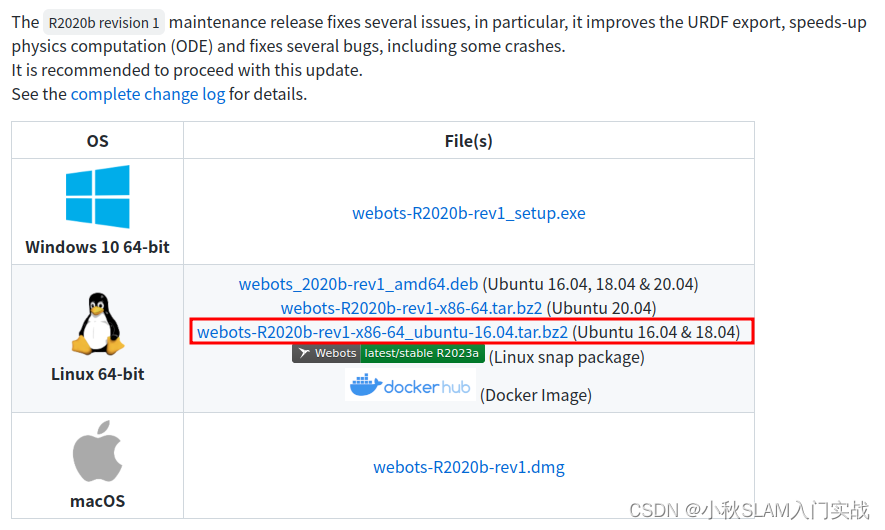
webots版本:2020b rev1
ros版本:melodic
在前面几章中分别介绍了在webots中如何创建自己的机器人、添加传感器以及使用手柄或键盘驱动它在仿真环境中移动。在本章中,你会学习到ROS系统最强大的特性之一,它能够让你的机器人自主导航和运动。
1. ROS导航框架
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-f9L0hkBb-1610549321728)(1.jpg)]](https://img-blog.csdnimg.cn/20210113224901392.jpg?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3hpYW9rYWkxOTk5,size_16,color_FFFFFF,t_70#pic_center)
在图中,能够看到白色、灰色和虚线三种框。白框表示其中的这些功能包集已经在ROS中集成了,并且它们提供的多种节点能够为机器人实现自主导航。
2. 测量或估计机器人姿态
在webots中可以直接使用GPS进行定位。并且利用IMU传感器获取惯性信息来补偿位置和方向值。
姿态(位置+方向):在ROS中,机器人的位置(position:x,y,z)和方向(orientation:x,y,z,w)被定义为姿态。
2.1 在webots中加入GPS和IMU
-
打开webots
-
在Robot->children下添加如下两个设备
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-AlSmLtQ4-1610549321731)(2.jpg)]](https://img-blog.csdnimg.cn/20210113224910879.jpg#pic_center)
-
保存并刷新场景
-
在控制台下输入以下命令查看是否同步到webots
$ rosservice list
可以看到已经同步上来了
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-nBhiDwlq-1610549321733)(3.jpg)]](https://img-blog.csdnimg.cn/20210113224919594.jpg?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3hpYW9rYWkxOTk5,size_16,color_FFFFFF,t_70#pic_center)
3. 识别障碍物
这里我们使用了激光雷达,在上一节已经带大家配置、调试好了。
在webots中包含了市面上常见的传感器。有距离传感器和视觉传感器等多种传感器。其中距离传感器有基于雷达的距离传感器(常用的是LDS、LRF和LiDAR)、超声波传感器和红外距离传感器等,而视觉传感器包括立体相机、单镜相机、360度相机,以及经常用作深度摄像头的Kinect也都用于识别障碍物。
4. 创建变换
导航包需要知道传感器、轮子和关节的位置。
在这里我们使用tf软件库来完成这部分工作。它会管理坐标变换树。
4.1 创建广播机构
- 让我们创建一个代码测试测试一下。在
webots_demo/src文件夹下创建一个robot_broadcaster.cpp。 - 为了不重复造轮子,直接把webots_ros基础代码复制进来。
#include <signal.h>
#include <std_msgs/String.h>
#include "ros/ros.h"#include <webots_ros/set_float.h>
#include <webots_ros/set_int.h>
#include <webots_ros/Int32Stamped.h>using namespace std;
#define TIME_STEP 32 //时钟
#define NMOTORS 2 //电机数量
#define MAX_SPEED 2.0 //电机最大速度ros::NodeHandle *n;static int controllerCount;
static vector<string> controllerList; ros::ServiceClient timeStepClient; //时钟通讯客户端
webots_ros::set_int timeStepSrv; //时钟服务数据/*******************************************************
* Function name :controllerNameCallback
* Description :控制器名回调函数,获取当前ROS存在的机器人控制器
* Parameter :@name 控制器名
* Return :无
**********************************************************/
void controllerNameCallback(const std_msgs::String::ConstPtr &name) { controllerCount++; controllerList.push_back(name->data);//将控制器名加入到列表中ROS_INFO("Controller #%d: %s.", controllerCount, controllerList.back().c_str());
}
/*******************************************************
* Function name :quit
* Description :退出函数
* Parameter :@sig 信号
* Return :无
**********************************************************/
void quit(int sig) {ROS_INFO("User stopped the '/robot' node.");timeStepSrv.request.value = 0; timeStepClient.call(timeStepSrv); ros::shutdown();exit(0);
}int main(int argc, char **argv) {setlocale(LC_ALL, ""); // 用于显示中文字符string controllerName;// 在ROS网络中创建一个名为robot_init的节点ros::init(argc, argv, "robot_init", ros::init_options::AnonymousName);n = new ros::NodeHandle;// 截取退出信号signal(SIGINT, quit);// 订阅webots中所有可用的model_nameros::Subscriber nameSub = n->subscribe("model_name", 100, controllerNameCallback);while (controllerCount == 0 || controllerCount < nameSub.getNumPublishers()) {ros::spinOnce();}ros::spinOnce();// 服务订阅time_step和webots保持同步timeStepClient = n->serviceClient<webots_ros::set_int>("robot/robot/time_step");timeStepSrv.request.value = TIME_STEP;// 如果在webots中有多个控制器的话,需要让用户选择一个控制器if (controllerCount == 1)controllerName = controllerList[0];else {int wantedController = 0;cout << "Choose the # of the controller you want to use:\n";cin >> wantedController;if (1 <= wantedController && wantedController <= controllerCount)controllerName = controllerList[wantedController - 1];else {ROS_ERROR("Invalid number for controller choice.");return 1;}}ROS_INFO("Using controller: '%s'", controllerName.c_str());// 退出主题,因为已经不重要了nameSub.shutdown();// main loopwhile (ros::ok()) {if (!timeStepClient.call(timeStepSrv) || !timeStepSrv.response.success) {ROS_ERROR("Failed to call service time_step for next step.");break;}ros::spinOnce();}timeStepSrv.request.value = 0;timeStepClient.call(timeStepSrv);ros::shutdown(); return 0;
}
- 在上文中,我们知道我们需要三个检测元件,分别是GPS、IMU、激光雷达。
- 在进行下面的操作前,我们首先要知道各个元件对应的数据类型是什么。
使用rosservice list查看服务,找到/robot/gps/enable。
在控制台中输入以下命令对其使能:
$ rosservice call /robot/gps/enable "value: 32"success: True
使能完后使用rostopic list查看gps是否发布了话题/robot/gps/values
在控制台下输入以下命令获取数据类型:
$ rostopic info /robot/gps/values Type: sensor_msgs/NavSatFixPublishers: * /robot (http://mckros-GL553VD:39691/)Subscribers: None
从上面可以看到数据类型为sensor_msgs/NavSatFix,那我们写程序时头文件就要加入#include <sensor_msgs/NavSatFix.h>
介绍了gps数据类型获取的方法,其他两个元件类似。
5. 需要分别对其使能才能在webots中正常运行。
- 使能GPS并且获取GPS数据
头文件:
#include <sensor_msgs/NavSatFix.h>
订阅gps服务:
ros::ServiceClient gps_Client; webots_ros::set_int gps_Srv; ros::Subscriber gps_sub;gps_Client = n->serviceClient<webots_ros::set_int>("/robot/gps/enable"); // 使能GPS服务gps_Srv.request.value = TIME_STEP;// 判断gps使能服务是否成功if (gps_Client.call(gps_Srv) && gps_Srv.response.success) {ROS_INFO("gps enabled.");// 订阅gps话题,获取数据gps_sub = n->subscribe("/robot/gps/values", 1, gpsCallback);ROS_INFO("Topic for gps initialized.");while (gps_sub.getNumPublishers() == 0) {}ROS_INFO("Topic for gps connected.");} else {if (!gps_Srv.response.success)ROS_ERROR("Failed to enable gps.");return 1;}
gps回调函数:
void gpsCallback(const sensor_msgs::NavSatFix::ConstPtr &values)
{GPSvalues[0] = values->latitude;// 纬度GPSvalues[1] = values->altitude;// 海拔高度GPSvalues[2] = values->longitude;// 经度broadcastTransform(); // tf坐标转换
}
- 使能IMU并且获取IMU数据
头文件:
#include <sensor_msgs/Imu.h>
订阅IMU服务
ros::ServiceClient inertial_unit_Client; webots_ros::set_int inertial_unit_Srv; ros::Subscriber inertial_unit_sub;inertial_unit_Client = n->serviceClient<webots_ros::set_int>("/robot/inertial_unit/enable"); //订阅IMU使能服务inertial_unit_Srv.request.value = TIME_STEP;// 判断是否使能成功if (inertial_unit_Client.call(inertial_unit_Srv) && inertial_unit_Srv.response.success) {ROS_INFO("inertial_unit enabled.");// 获取话题数据inertial_unit_sub = n->subscribe("/robot/inertial_unit/roll_pitch_yaw", 1, inertial_unitCallback);ROS_INFO("Topic for inertial_unit initialized.");while (inertial_unit_sub.getNumPublishers() == 0) {}ROS_INFO("Topic for inertial_unit connected.");} else {if (!inertial_unit_Srv.response.success)ROS_ERROR("Failed to enable inertial_unit.");return 1;}
回调函数:
void inertial_unitCallback(const sensor_msgs::Imu::ConstPtr &values)
{Inertialvalues[0] = values->orientation.x; Inertialvalues[1] = values->orientation.y;Inertialvalues[2] = values->orientation.z;Inertialvalues[3] = values->orientation.w;broadcastTransform(); // tf坐标转换
}
- 使能激光雷达
ros::ServiceClient lidar_Client; webots_ros::set_int lidar_Srv; lidar_Client = n->serviceClient<webots_ros::set_int>("/robot/Sick_LMS_291/enable"); // 订阅lidar使能服务lidar_Srv.request.value = TIME_STEP;// 判断是否使能成功if (lidar_Client.call(lidar_Srv) && lidar_Srv.response.success) {ROS_INFO("gps enabled.");} else {if (!lidar_Srv.response.success)ROS_ERROR("Failed to enable lidar.");return 1;}
- tf 坐标转换:
void broadcastTransform()
{static tf::TransformBroadcaster br;tf::Transform transform;transform.setOrigin(tf::Vector3(-GPSvalues[2],GPSvalues[0],GPSvalues[1]));// 设置原点tf::Quaternion q(Inertialvalues[0],Inertialvalues[1],Inertialvalues[2],Inertialvalues[3]);// 四元数 ->欧拉角q = q.inverse();// 反转四元数transform.setRotation(q); //设置旋转数据br.sendTransform(tf::StampedTransform(transform,ros::Time::now(),"odom","base_link"));// 发送tf坐标关系transform.setIdentity();br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "base_link", "/robot/Sick_LMS_291"));
}
记得将下面这几行加入到CMakelist.txt文件中以正常编译。
# 括号内加入tf
find_package(catkin REQUIRED COMPONENTS )
# 括号内加入tf
catkin_package()add_executable(robot_broadcaster src/robot_broadcaster.cpp)
add_dependencies(robot_broadcaster webots_ros_generate_messages_cpp)
target_link_libraries(robot_broadcaster ${catkin_LIBRARIES})
由于要使用到tf包,所以在package.xml中需要添加如下信息:
<!--导航-->><build_depend>tf</build_depend><build_export_depend>tf</build_export_depend><exec_depend>tf</exec_depend>
- 编译
$ cd catkin_ws/
$ catkin_make
- 运行试试
$ rosrun webots_demo robot_broadcaster
运行rqt查看tf tree
$ rosrun rqt_tf_tree rqt_tf_tree
可以看到如下所示图,说明各个节点已经成功连接在一起了。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ryVJwnyK-1610549321735)(4.jpg)]](https://img-blog.csdnimg.cn/20210113224957153.jpg?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3hpYW9rYWkxOTk5,size_16,color_FFFFFF,t_70#pic_center)
结语
本文也是基于笔者的学习和使用经验总结的,主观性较强,如果有哪些不对的地方或者不明白的地方,欢迎评论区留言交流~
✌Bye