这个功能不错webots.cloud
但是,如果网络不畅通:
个把小时也不会有任何进展……
文档如果网络不畅,也打开困难……
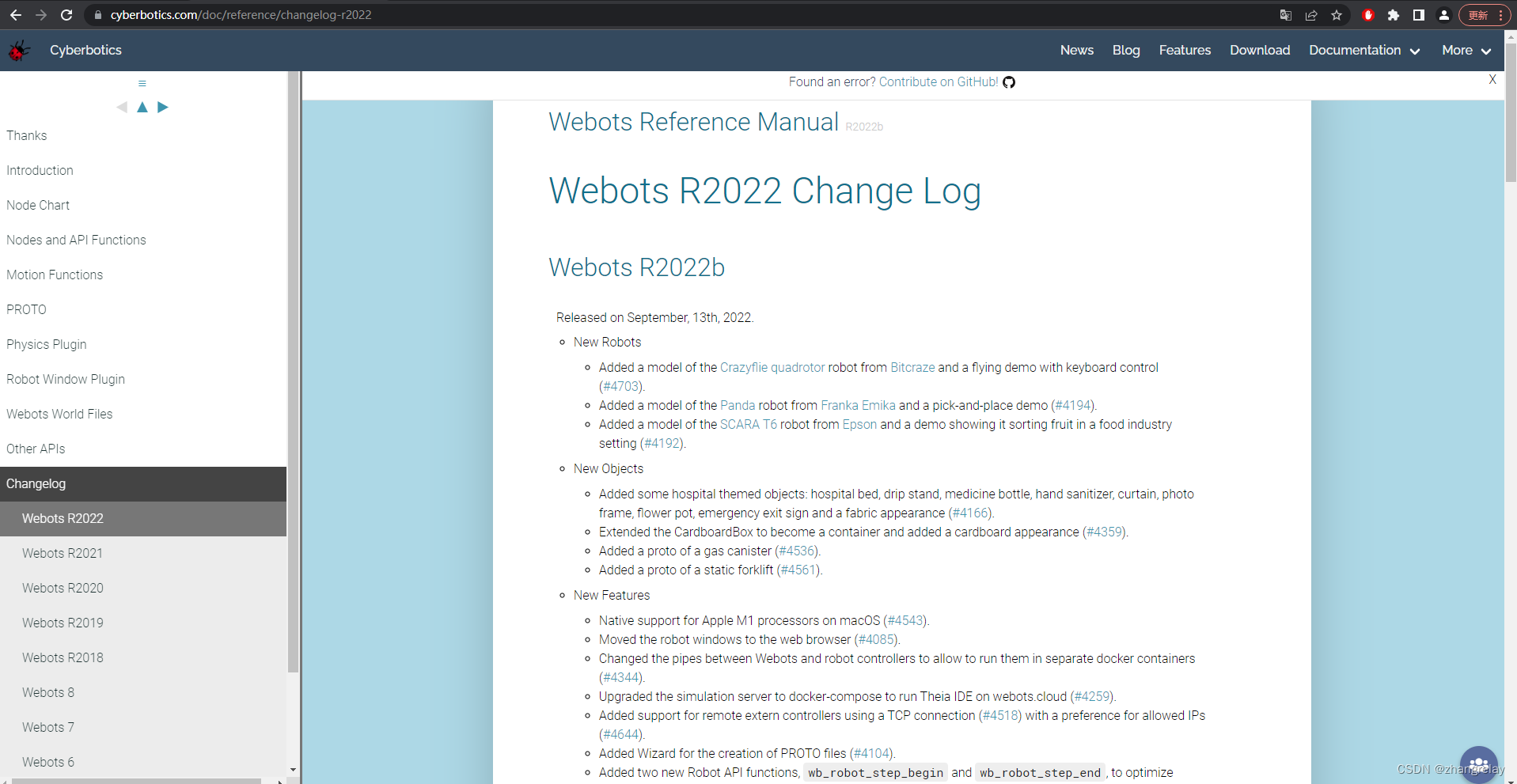

Webots参考手册
Webots R2022 更改日志
版本 R2022b
于 2022 年 9 月 13 日发布。
- 新机器人
- 添加了来自Bitcraze的Crazyflie 四旋翼机器人模型和带键盘控制的飞行演示 ( #4703 )。
- 添加了来自Franka Emika的Panda机器人模型和取放演示 ( #4194 )。
- 添加了Epson的SCARA T6机器人模型和演示它在食品行业环境中分拣水果的演示 ( #4192 )。
- 新对象
- 添加了一些医院主题物品:病床、滴水架、药瓶、洗手液、窗帘、相框、花盆、紧急出口标志和织物外观(#4166)。
- 将 CardboardBox 扩展为容器并添加了纸板外观(#4359)。
- 添加了一个气罐原型(#4536)。
- 添加了静态叉车的原型(#4561)。
- 新的功能
- macOS ( #4543 )上对 Apple M1 处理器的原生支持。
- 将机器人窗口移至 Web 浏览器(#4085)。
- 更改了 Webbot 和机器人控制器之间的管道,以允许在单独的 docker 容器中运行它们(#4344)。
- 将模拟服务器升级到 docker-compose 以在 webots.cloud ( #4259 ) 上运行 Theia IDE。
- 添加了对使用 TCP 连接 ( #4518 ) 的远程外部控制器的支持,并优先考虑允许的 IP ( #4644 )。
- 添加了用于创建 PROTO 文件的向导 ( #4104 )。
- 添加了两个新的机器人 API 函数
wb_robot_step_begin和wb_robot_step_end,以优化计算机密集型控制器 ( #4107 )。 - 添加了
Extra Project通过“首选项”菜单定义多个路径的功能,以及通过设置WEBOTS_EXTRA_PROJECT_PATH环境变量的替代方法。(#4364)。先前设置的额外项目路径应在首选项菜单中重新设置。 - 添加了一个分享按钮来上传场景和动画到webots.cloud ( #3971 )。
- 将浮动窗口添加到 Web 流和改进的工具栏 ( #4355 )。
- 在 WebotsJS ( #4394 )中添加了对TrackWheel和Track动画的支持。
- 在 WebotsJS ( #4537 )中添加了对字段
on和Light更新的支持。color - 添加
EXTERNPROTO了支持并相应地转换了所有世界(#4551)。此处提供了调整您的世界和 PROTO 节点的说明。 - 添加了将视点与其上下文菜单中的选定对象对齐的功能 ( #5149 )。
- 增强功能
- 添加了对 Python 3.10 ( #4474 ) 的支持。
- 添加了两个新的 PBR 外观:ScuffedPlastic 和 WornBurlap ( #4174 )。
- 添加了新的 HDR 背景:
music_hall(#4177)。 - 用更高效的 JPG 图像 ( #4182 ) 替换了立方背景 PNG 图像。
- 使用新的 Webots 首选项 ( #4233 ) 更改了在系统中检测 MATLAB 的方式。
- 禁止TrackWheel
USE以避免错误行为(#4257)。 - 更改了
wb_robot_wwi_receive_text遍历接收到的消息缓冲区的行为(#4336)。 - 为Mavic 2 Pro添加了一个 python 控制器,演示如何将无人机移动到特定的坐标和高度(#4293)。
- 改进了Nao PROTO 的结构:
version字段更改,color字段替换为customColor字段(#4180)。 scale在Transform节点中允许负值,并在Mesh节点中添加了一个ccw字段( #4243 )。- 添加了关节中锚点的渲染(#4256)。
- 将 ColladaShapes PROTO 替换为CadShape节点 ( #4285 )。
- 减少纹理质量设置为中或低时的加载时间(#4621)。
- 更改了Web 界面的加载屏幕和进度条的布局和行为( #4593 )。
- 改进了文本编辑器中生成的 PROTO 源的显示,现在以只读模式打开 ( #5023 )。
- 改进了与世界相关的Viewpoint标准视图的术语和键盘快捷键( #5149 )。
- 添加了从上下文菜单打开字段编辑器并双击场景树节点或字段项的快捷方式(#5211)。
- Bug修复
- 修复了在 Windows 上以非 ASCII 字符 ( #5103 ) 的 UTF-8 路径执行 Webots。
- 修复了
wb_supervisor_node_get_field_by_indexAPIwb_supervisor_node_get_proto_field_by_index函数中的错误 ( #4366 )。 - 修复了未打开 Webots 控制台时将 stdout/stderr 重定向到终端的问题(#4372)。
- 修复使用ros时无法获取摇杆释放按钮状态,使用Int8Stamped类型无法读取POV数据的问题(#4405)。
- 修复了SolidReference节点 ( #4102 ) 和 ( #4620 ) 的 URDF 导出。
- 修复了 Solid 中值健全性检查不足
postPhysicsStep导致Track爆炸的问题(#4133)。 - 修复
wb_supervisor_world_save了非 C API 中未提供参数时的行为 ( #4140 )。 camera/recognition_objects修复了始终返回空对象列表的 ROS主题( #4139)。- 固定深度大于RangeFinder设备的
maxRange返回inf值( #4167 )。 - 将丢失的样本世界转换
gears.wbt为 ENU ( 4201 )。 - 修复了未检索到相机设备的纹理 ( #4218 )。
- 修复了 DEF 节点中的更改未针对 PROTO 传播的错误(#4245)。
- 修复了手动或从主管更新 URL 时形状中网格节点的错误更新( #4245)。
- 修复了使用主管移动物体后导致物体沉入地下的错误 ( #4070 )。
- 修复了Skin节点对分段和
RangeFinder设备不可见的错误 ( #4281 )。 - 修复了RangeFinder设备靠近近平面的测量( #4309 )。
- 修复了更新网格节点的 URL 导致发布多个更新的错误 ( #4325 )。
- 固定透视图(即,当布局更改时)保存逻辑和相机菜单覆盖(#4350)。
- 修复了虚拟现实和
get_contact_pointsROS 服务,不再宣传已弃用的服务:get_number_of_contact_points、get_contact_point和get_contact_point_node(#4371)。 - 修复了流式传输非常大的ElevationGrid ( #4426 ) 时的崩溃。
- 修复了运动机器人的碰撞逻辑 ( #4509 )。
- 修复了移动插入到Fluid.boundingObject ( #4568 )中的Transform节点的崩溃。
- 修复了在接触点数量非常多的情况下支持多边形可选渲染的崩溃(#4569)。
- 修复了将 PROTO 导出到 URDF 时的崩溃 ( #4608 )。
- 固定对象识别颜色在更改时未在相机分割图像中更新(#4619)。
- 修复了启用皮肤骨架可选渲染时骨骼的方向(#4626)。
- 修复了在 R2022a ( #4633 ) 之前使用 Webots 创建的一些崩溃加载和转换世界的问题。
- 固定动画时间不是从 0 秒开始(#4659)。
- 修复了扬声器的左右颠倒声音(#4847)。
- 修复了顶部节点不是机器人节点的设备的各种崩溃 ( #4878 )。
- 修复了导致激光雷达在模拟重置后产生错误测量的错误 ( #5084 )。
- 修复了在快速模式下运行模拟时打开的冻结颜色选择器对话框(#5097)。
- 修复了几何图形和变换调整大小手柄的表示和行为( #5080)。
- 修复了向实体对象施加力或扭矩时的箭头表示( #5080 )。
- 通过按住 SHIFT 键(#5080 )在 3D 场景中拖动实体对象时,修复了移动实体对象时不需要的位置跳跃。
- 修复了使用正交投影模式时的拖动事件 ( #5080 )。
- 修复了字段编辑器中的“显示调整大小句柄”复选框状态 ( #5080 )。
- 修复了更新时对象的背景反射
skyColor(#5133)。 - 修复了在Skin、Motor、Camera和ContactProperties字段中使用无效 URL 时的多次崩溃( #5132 )。
WbPbrAppearance修复了在创建节点时也会触发的清理( #5139 )。- 固定字段更改未在嵌套派生 PROTO 中传播(#5157)。
- 清理
- 将向导菜单移到文件/新建菜单中(#5075)。
- 从 Webbots 和 Controller API ( #5061 ) 中删除了 WBO 文件导入。
- 删除
wb_robot_get_type了 API 函数,因为它不再有任何用途(#4125)。 - 在 Windows ( #4617 )上删除了 libController.dll 的旧 i686 二进制版本。
- 删除了已弃用的 lua-gd 库 ( #4543 )。
- 通过引入CadShape节点 ( #4285 ) 删除了 3D 模型导入菜单选项。
- 重命名
CameraRecognitionObject和ContactPoint相关 API 方法以使用驼峰式大小写 ( #4477 )。 - 重命名了新的控制器和插件规范(#4501)。
- 依赖更新
- 在 Windows、macOS 和 Linux 上升级到 Qt6.2 ( #4189 )。
- 删除了 Qt WebKit、WebChannel 和 WebEngine 依赖项 ( #4137 )。
- 在 macOS 和 Linux ( #4285 )上将 assimp 从 5.0.1 升级到 5.2.3 。
- Linux:添加了对 Ubuntu 22.04 LTS 的支持并停止了对 Ubuntu 18.04 的支持(#4502)。
- Linux:删除了对 Python 3.6 ( #4502 ) 的支持。
- Linux:将 SUMO 版本升级到 1.13.0 ( #4502 )。
- macOS:将 SUMO 版本升级到 1.13.0 ( #4758 )。
微博 R2022a
于 2021 年 12 月 21 日发布。
- 新的功能:
- 已发布皮肤节点 ( #3566 )。
- 在ContactProperties ( #3771 )中添加了对滚动摩擦的支持。
- 添加了允许动态导入 Collada 文件的 ColladaShapes PROTO ( #3956 )。
- 整个机器人、对象和世界库已转换为 FLU/ENU 坐标系,可能需要手动更改本地文件。更多详细信息可在此处获得。
- 增强功能
- 提高了激光雷达点云生成的性能 ( #3499 )。
- 将速度矢量输出添加到 GPS ( #3742 )。
- 添加
wbu_car_set_[right/left]_steering_angle了允许直接控制车轮的转向(#3933)。 - 改进了使用对象绕轴旋转功能时的用户体验 ( #3540 )。
- 缩放 3D 窗口时提高鼠标滚轮速度 ( #3565 )。
- 尝试将节点添加到已启动的模拟时添加警告(#3926)。
- Bug修复
- 修复了由于ImageTexture节点清理不正确导致的内存泄漏(#3830)。
- 修复了各种 Python API 函数在 Python 3.9 ( #3502 ) 中崩溃的问题。
- 修复了获取 PROTO 的接触点时导致的崩溃(#3522)。
- 修复了由于使用超出范围的值调用 acos 函数并导致堆栈溢出而导致的崩溃 ( #3734 )。
- 修复了由机器人节点自动再生引起的崩溃( #3869 )。
- 修复了导致
getPointCloud无法访问 python API 返回的点的错误 ( #3558 )。 - 修复了从 Windows CMD.exe 控制台启动 Webots ( #3512 )。
- 使用由 url 定义的纹理修复了“转换为基本节点”(#3591)。
- 修复了由于阴影坐标缓冲区清理不正确导致的内存泄漏(#4038)。
- 修复了Track节点施加的力方向( #3693)。
- 修复了 Windows 上损坏的 Lua gd ( #3769 )。
- wb_supervisor_node_set_visibility如果不与几何或变换节点一起使用,则修复了对父节点和兄弟节点应用可见性(#3543)。
- 修复了重启外部控制器后更新机器人窗口的问题(#3544)。
- 修复了 Driver 库中的计算,
front_speed_sum以便在 4x4 汽车的情况下考虑两个前轮(#3546)。 - 修复了当拾取的Solid是Transform节点的子节点并且水平面从视图中不清晰可见时的 Shift + Left Button 拖动事件( #3530)。
- 修复了插入物理节点后的质量计算,以防Solid.boundingObject已定义(#3240)。
- 修复了锥体和圆柱体的可拾取状态 ( #3644 )。
- 修复了网格节点的质量计算 ( #3719 )。
- 修复了Nao PROTO的 v3.3 (21 DoF) 变体没有手的问题 ( #3696 )。
- 固定激光和红外线距离传感器击中完全透明的物体 ( #3726 )。
- 修复了来自主管的轮换变化传播 ( #3752 )。
- 修复了 4x4 车辆中差速器滑移率的错误更新 ( #3770 )。
- 固定
wb_keyboard_get_key()为 MT 安全 ( #3783 )。 - 当机器人电池电量耗尽时,在控制台中显示警告(#3783)。
- 修复了 Matlab API 中不正确的节点枚举和缺少
WB_MF_ROTATION常量 ( #3808 )。 - 修复了 ElevationGrid ( #3828 )的不正确 boundingSphere 计算。
- 修复了从Supervisor中删除节点没有刷新场景树的错误 ( #3867 )。
- 在无法保存文件或构建过程由于写入权限不足(#4046)而失败时显示警告。
- 依赖更新
- 停止支持 Ubuntu 16.04 ( #3480 )。
-机器翻译-
此主要版本进行了多项改进:
- 新机器人模型:Bitcraze Crazyflie、Franka Emika Panda、Epson Scara T6
- 新的 CadShape 节点
- 能够在 https://webots.cloud 3 上的网络上共享自定义模拟
- 能够在具有不同版本 ROS 的 Docker 中运行机器人控制器
- 对 Apple Silicon 处理器的原生支持
- 以及许多小的增强、优化和错误修复
- 建议继续进行此升级。
见官方公告5,完成变更日志3。
立即从 GitHub 1 或 https://cyberbotics.com 3 获取它
关于 Cyberbotics Ltd.
Cyberbotics 3 长期致力于为机器人社区提供高质量、免费和开源的软件。 Webots 的开发得到了几个欧洲研究项目的支持,包括 OpenDR 和 OPTIMA 1、SimGait 瑞士国家研究项目、SeRoNet 德国国家研究项目、RoboCup 联合会以及许多其他私人和学术合作伙伴。
This major release comes with several improvements:
new robot models: Bitcraze Crazyflie, Franka Emika Panda, Epson Scara T6
new CadShape node
ability to share your simulations on the web at https://webots.cloud 3
ability to run robot controllers in Dockers with different versions of ROS
native support for Apple Silicon processors
and many small enhancements, optimizations and bug fixes
It is recommended to proceed with this upgrade.See the official announcement 5 and complete change log 3.
Get it now from GitHub 1 or https://cyberbotics.com 3
About Cyberbotics Ltd.
Cyberbotics 3 remains committed to provide high quality, free and open source software to the robotics community on the long run. The development of Webots is supported by several European research projects, including OpenDR and OPTIMA 1, the SimGait Swiss national research project, the SeRoNet German national research project, the RoboCup federation and many other private and academic partners.