目录
网络层功能
ICMP协议
ICMP作用
ICMP功能
冲突域
广播域
arp协议
工作原理
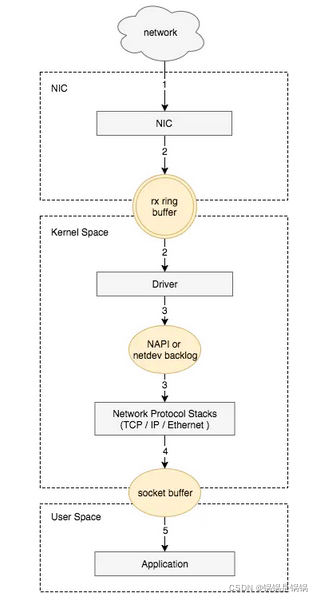
网络层功能
定义了基于 IP 协议的逻辑地址,就是 ip 地址
连接不同的媒介类型
选择数据通过网络的最佳路径,完成逻辑地址寻址 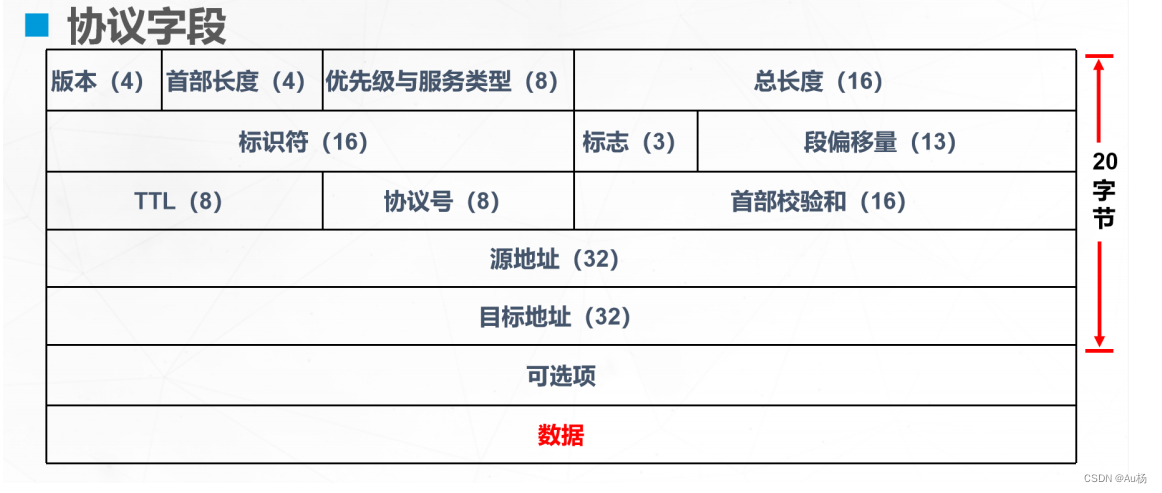
数据封装的时候在网络层会封装 ip 地址的头部,形成 ip 数据包
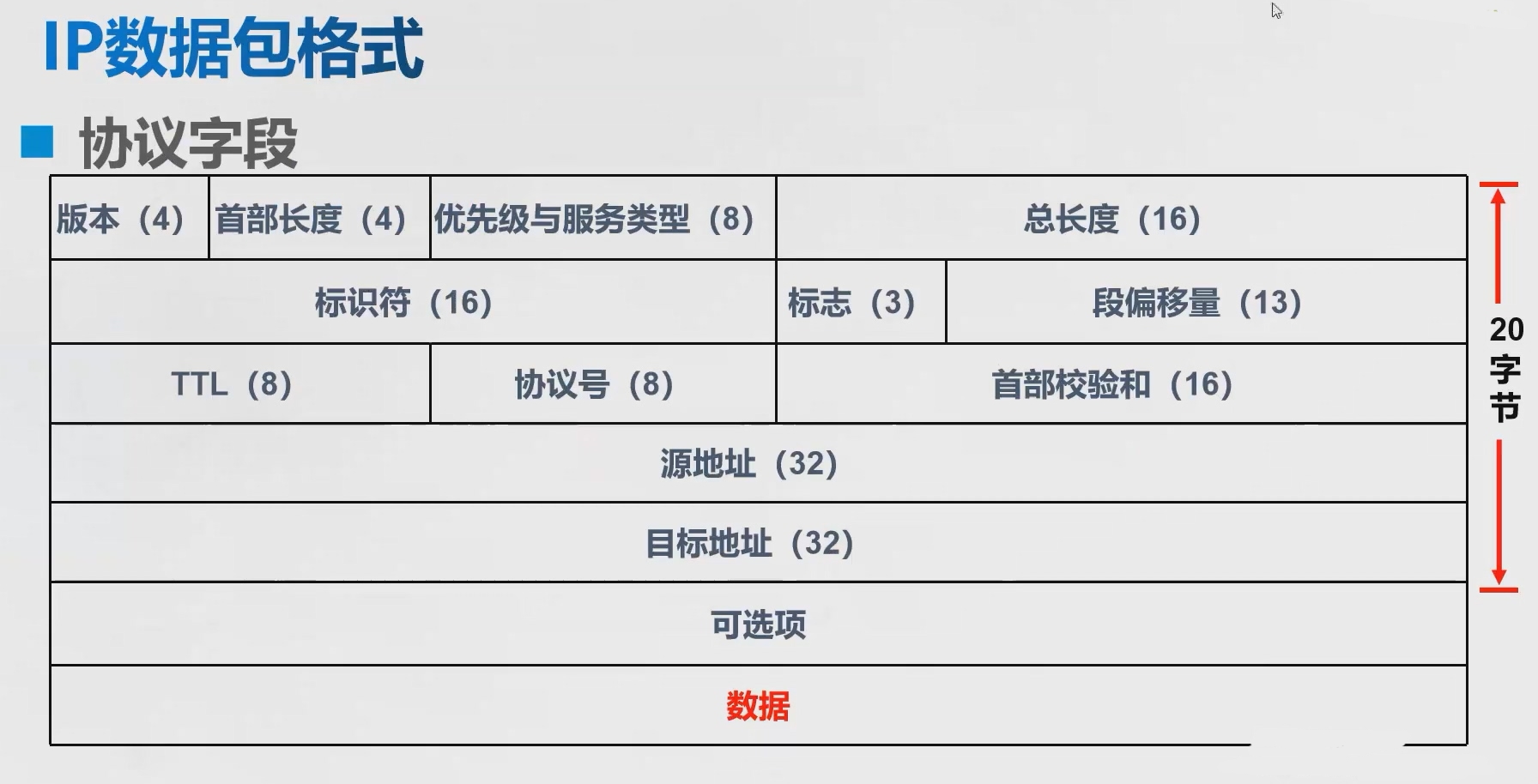
IP 数据包格式(分为 20 字节的固定部分,表示每个 ip 数 据包必须包含的部分,和40 字节的可变长部分
版本号( 4bit ):指 IP 协议版本。并且通信双方使用 的版本必须一致,目前我们使用的是IPv4 ,表示为 0100
首部长度(4): IP 数据包的包头长度(不包括数据)
优先级与服务类型(8):该字段用于表示数据包的 优先级和服务类型。通过在数据包中划分一定的优先 级,用于实现 QoS (服务质量)的要求。
总长度( 16 ): IP 数据包的总长度,最长为 65535 字 节,包括包头和数据。
标识符( 16 ):该字段用于表示 IP 数据包的标识符。
当 IP 对上层数据进行分片时,它将给所有的分片数据 分配一组编号,然后将这些编号放入标识符字段中, 保证分片不会被错误地重组。标识符字段用于标志一个数据包,以便接收节点可以重组被分片的数据包
标志(3):和标识符一起传递,指示不可以被分片 或者最后一个分片是否发出( 完整 )
段偏移量( 13 ):在一个分片序列中如何将各分片连
接起来,按什么顺序连接起来
TTL( time to live )生命周期(8):可以防止一个 数据包在网络中无限循环的转发下去,每经过一个路 由器 -1, 当 TTL 的值为 0 时,该数据包将被丢弃 0-255
协议号(8):封装的上层哪个协议, ICMP:1 TCP:6 UDP:17
首部校验和( 16 ):这个字段只检验数据报的首部, 不包括数据部分。这是因为数据报每经过一次路由 器,都要重新计算一下首部校验和(因为,一些字段 如生存时间、标志、片偏移等可能发生变化)。
源地址(32 ):源 ip 地址,表示发送端的 IP 地址
目标地址( 32 ):目标 ip 地址,表示接收端的 IP 地址 可选项:选项字段根据实际情况可变长,可以和IP一 起使用的选项有多个。例如,可以输入创建该数据包 的时间等。在可选项之后,就是上层数据。 
注:根据实际情况可变长,例如创建时间等 上层数据
ICMP协议
Internet 控制消息协议 ICMP ,是 IP 协议的辅助协议
ICMP 协议用来在网络设备间传递各种差错和控制信息, 对于收集各种网络信息、诊断和排除各种网络故障等方面起着至关重要的作用。
ICMP作用
检测网络的双向联通性
ICMP功能
Ping 是网络设备、 Windows 、 Unix 和 Linux 平台上的一 个命令,其实是一个小巧而实用的应用程序,该应用基 于ICMP 协议。 Ping常用于探测到达目的节点的网络可达性。
当网络出现问题时,首先ping自己(127.0.0.1)确认硬件是否有问题,其次看双方ip地址是否有问题,然后看网关是否存在问题,最后确认防火墙策略是否有问题。
ping 的通 一定通
ping 不通 不一定网络不通
冲突域
两台设备同时发送消息时,互相干扰,那他们就处于同一个冲突域。
广播域
一台机器发送广播,能收到消息的机器 都是在同一广播域(同一网段)
arp协议
地址解析协议, 是通过解析 IP 地址得到 MAC 地址的,是一个 在网络协议包中极其重要的网络传输协议,它与网卡有 着极其密切的关系,在 TCP/IP 分层结构中,把 ARP 划分 为网络层(三层协议)。
工作原理
以两台局域网主机互相通信为例讲解原理 ARP解析过程
PC1发送数据给PC2,首先在自己本地arp表中查询pc2的mac地址是否存在,如没有响应,则会将arp请求帧广播到所有主机,其他主机收到请求会检查与自己的ip地址是否匹配,不匹配会丢弃,匹配则会将包含mac地址的arp消息发回PC1(单播),pc1收到后将pc2的ip和mac地址存到自己arp缓存表(有效期120s)并与pc2通信(单播)。如超过该周期会重复上面过程。