科技学习:第1篇 无人驾驶技术概述
放眼全球,近年来,无人驾驶技术很火。Google、Tesla、Baidu争相研发无人驾驶汽车,该领域的市场潜力很大,是汽车产业未来的一个方向。无人驾驶技术值得我们深入研究学习、思考总结。今天呢,我们就来简单科普一下:什么是无人驾驶。

The self-driving cars,“无人驾驶”或“智能驾驶”。个人理解为:电脑驾驶汽车。简单一句话,前后6个字,包括了计算机软硬件、汽车原理、通讯、算法、控制等诸多方面。可见,无人驾驶不只是单一的技术,而是多个维度技术环节的组合与整合。
一、无人驾驶汽车的优点
个人认为,其优点主要有以下4项:
1.人有驾驶疲劳,机器会程序持续工作;(你累,机器不累)
2.人有判断误差,机器会准确判断情况;(你迷糊,机器不迷糊)
3.人有视角盲区,机器会全面监控数据;(你看不见,机器看得见)
4.人有思维局限,机器会智能算法处理。(你算不准,机器算得准)
可见,无人驾驶汽车的可靠、准确、智能等优点非常亮眼,堪称改变汽车未来的一匹神马。当然,人无完人,车无完车。目前,无人驾驶也存在一些不足:应对极复杂情况能力有限、元器件成本较高、车型不够美观、交通事故责任不够明晰等。这些不足之处,有待聪明的您进一步改进。
二、无人驾驶汽车的基本原理

按照SAE标准将自动驾驶技术分为0~5共六个级别。包括一般驾驶、自动化驾驶、辅助驾驶、高度自动化、完全自动化、智能化驾驶等,因篇幅有限,具体不作赘述。下面,我们简要看一看运行流 程:

(1)High-definition map &Location–高精度地图导航、定位
目前,无人驾驶的定位方案主要有2种: 一是以Google为首的激光雷达为主的定位方案; 二是以Tesla、Mobileye为首的视觉定位方案。立足现实需要,高精地图定位要达到厘米级。不管是激光雷达定位系统还是视觉定位系统,原理都是依托高精度地图,利用实时扫描的(激光或视觉)环境特征与预先制作的高精地图进行匹配,进而获取精确的位置估计。比如车道线、红绿灯、限速、调头、减速带等交通标识,使无人车知道“我在哪,周围有什么”。
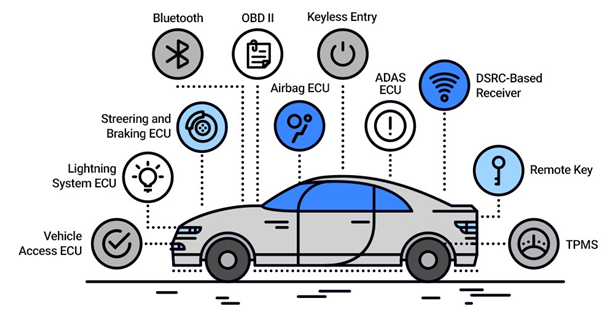
(2)Perception–环境感知

智能汽车的感知过程和人类感知存在一定类似。举个例子,早上我们听到鸟鸣、睁开眼睛、拉开窗帘,看到屋外阳光明媚,哦,是个晴天。这就是视觉、听觉、触觉的感知,从“看”、“听”、“触”等过程,获取到了环境信息–天气晴朗。同样道理,无人车也是通过传感器系统(camera、LIDAR、RADAR)和高精度地图,对周围环境实时进行感知,比如障碍物的位置、形状、类别及限速信息、车道坡度、摩擦系数,也包括对一些特殊场景的语义理解(例如施工区域,交通信号灯及交通路牌等),实时反馈数据至“车的大脑”,使无人车知道“周围具体有什么”。
(3)Prediction–预测

常言道,事后诸葛亮多,事前先知者少。可见预测的重要性和复杂性。举一个简单例子:在路口,车辆汇入时,该不该加速抢路权?如果我加速抢路权,右方车会礼让or加塞?会不会发生碰撞?发生碰撞概率多大?后方车会不会追尾?预测环节,相当于大脑的“军师”,它根据环境信息,判断可能会发生的情况,精确预测车辆、行人、细微扰动、突发情况等随机变量,使无人车知道“周围可能会发生什么”。
(4)Planning–路径规划

Planning,核心环节之一。这就像我们的人生,从出生、上学、工作、婚姻再到老去,每个人会碰到很多情况,有顺利、有干扰、有转机等。如何更好地应对各类事件,规避可能存在的危险,选择最适合发展的路,这就是规划。实际环境中,无人车面对着复杂的三维场景:交通路口、随机的车辆、行人、障碍物等。路径规划起到“大脑”作用,它一是融合环境信息,二是进行计算决策,三是安全前提下,规划选取最优路径,使无人车知道“遇到问题,该怎么办”。
(5)Control–控制

简单说,Control相当于人的“双手”,是实现行为的操作层。无人车的智能控制主要有基于模型的控制、神经网络控制和深度学习等方法。根据最优路径规划,通过“纵向”和“横向”控制(油门、刹车和转向等),实现车速调节、车距保持、换道、超车等基本操作,调节车辆行驶速度、位置和方向等状态。使无人车执行预定计划,完成我们赋予的任务。
三、简单总结
今天,我们简单了解无人驾驶汽车的基本原理。因时间原因,文稿还有欠缺,还望批评指正。具体的技术细节不做详述,建议感兴趣的朋友们可以通过自学,进一步学习无人驾驶技术知识。(声明:除参考图片外,全文纯手打原创,欢迎转发,注明出处即可)
欢迎关注:AI 畅学科技公众号
作 者:Jack Ou
今日格言:与其仰求上天,不如低头炼剑