本文代码
本文代码主体来自CVPR2020论文《Closed-loop matters: Dual regression networks for single image super-resolution》,但原作者并未提供论文亮点--如何使用unpair数据进行训练的代码,所以我在其基础上补齐了该过程的代码。
代码仓库:https://github.com/VitaminyW/Super_Solution
PS:对代码存在问题可以通过私信或评论区提问。
一、数据预处理
为了训练模型实现8倍超分,本工作中使用BICUBIC算法对高清图像进行下采样8倍,从而获得作为网络输入的低分辨率图像。
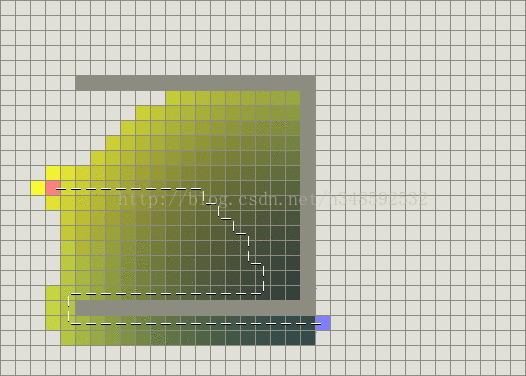
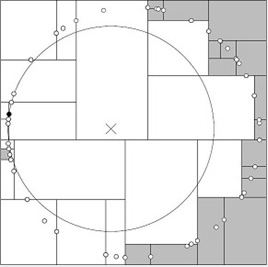
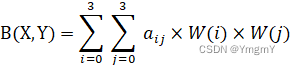
BICUBIC算法:双三次插值又称立方卷积插值。三次卷积插值是一种更加复杂的插值方式。该算法利用待采样点周围16个点的灰度值作三次插值,不仅考虑到4个直接相邻点的灰度影响,而且考虑到各邻点间灰度值变化率的影响。其权重函数如下所示,

其中a=-0.5,x为待插值点与插值点的距离。插值过程可由下式所示,
其中![]() 代表距离待插值点
代表距离待插值点![]() 的像素值。
的像素值。
图1. 0200.png下采图像展示
二、算法原理
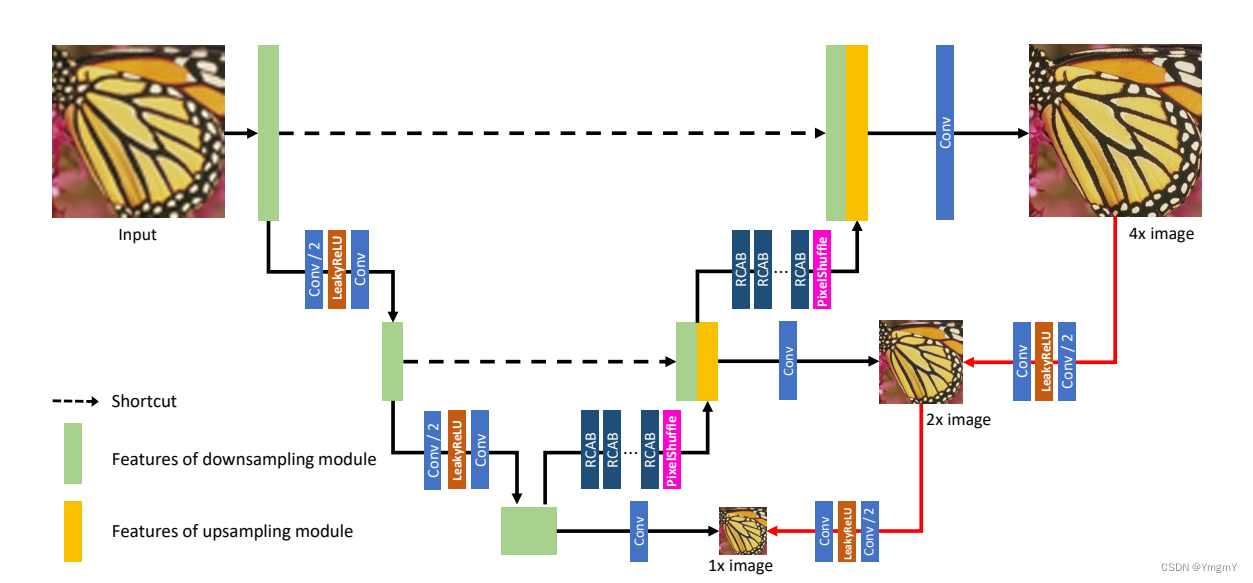
图2.DRN网络结构图
2.1 算法目标
在超分辨率问题中,存在着两个问题:
a. 从超分辨率图像到低分辨率图像存在着非常多种下采样方式,即真实世界的低分辨率图像形成的原因多种多样。
b. 深度学习是一种基于数据的学习方式,若数据集的输入是由某种特定下采方式得到的,则模型可能会学习到该特定下采方式的伪逆。
2.2 解决方法以及算法原理
a. 正向过程
网络通过借鉴UNet网络的结构方式,通过多级下采样提取图像特征,并通过concat方式结合原有图像特征与上采特征图进行上采样,从而产生多个高分辨率图像。若网络存在3个层级,则每个层级分别对应1倍、2倍以及4倍分辨率重建网络。最后通过MSE或MAE损失函数可以促使网络学习如何进行正向重建。
b. 对偶过程
正向过程是求解由低分辨率到高分辨率的解,即该问题解空间较大,所以需要较为复杂的网络结构。对偶过程指在学习数据中由高分辨率到低分辨率的下采过程,该过程解空间较小,可以使用较为简单的网络结构进行学习。
c. 半监督学习
由于对偶过程输入的为网络重建出来的高分辨率图像,其学习标签为低分辨率图像,所以该过程不依赖于是否拥有真实超分标签,从而网络可以进行半监督学习。
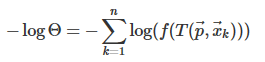
d. 损失函数

其中![]() 表示第i张低分辨率图像,
表示第i张低分辨率图像,![]() 表示第
表示第![]() 张高分辨率图像,
张高分辨率图像,![]() 代表网络重建,
代表网络重建,![]() 分别代表正向过程和反向过程的评估函数,
分别代表正向过程和反向过程的评估函数,![]() 代表指示
代表指示![]() 是否有对应的
是否有对应的![]() 的函数,若有为1,否则为0. 由
的函数,若有为1,否则为0. 由![]() 函数,在编程中易得pair数据与unpair数据分别计算损失函数进行反向传播。
函数,在编程中易得pair数据与unpair数据分别计算损失函数进行反向传播。
三、代码流程
3.1 详细步骤:
3.1.1 构建数据集,数据集结构如下图所示:
下采样代码位于代码目录的dataProcessing.ipynb
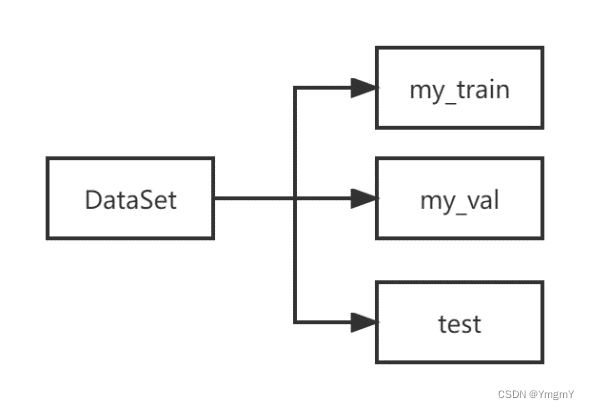
图3. 数据集结构
3.1.2 设置option.py文件
将--data_dir,--data_train,--data_val参数修改为对应数据集路径与名称。也可选择通过命令行输入。
3.1.3 运行训练代码
使用终端打开main.py所在文件目录,输入以下指令进行训练。
python main.py –batch_size 32 –n_GPUs 4 –save ./experiment/training_result --model DRN-S3.1.4 由于原文作者未提供使用unpaired数据进行网络fine-tune代码,本工作根据论文逻辑,编写了 main_fine_tune.py代码,输入以下指令进行训练
python main.py –batch_size 32 –n_GPUs 4 –save ./experiment/fine_tune_result --pre_train {预训练正向模型的参数保存地址} --pre_train_dual {预训练对偶模型的参数保存地址} --model DRN-S3.1.5 由于原文作者未提供重建unpaired数据的代码,本工作根据代码逻辑编写了对应main_reconstruction.py代码,输入指令进行预测。
python main_reconstruction.py --no_augment --model DRN-S --test_only --save ./reconstruction --save_results --batch_size 1 --save ./reconstruction --pre_train {fine-turn后正向模型的参数保存地址} --pre_train_dual {fine-turn后对偶模型的参数保存地址}3.2 过程截图
a. ./experiment/training_result文件夹下:

图4.train输出内容展示
b. ./experiment/fine_tune_result
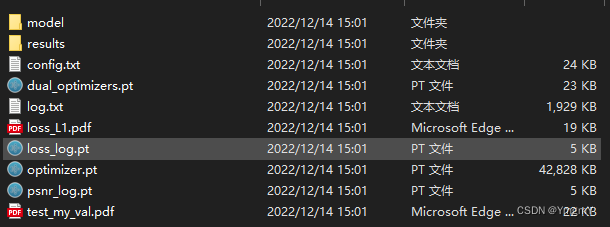
图5.fine-tune输出内容展示
c. ./reconstruction

图6.reconstrution输出内容展示
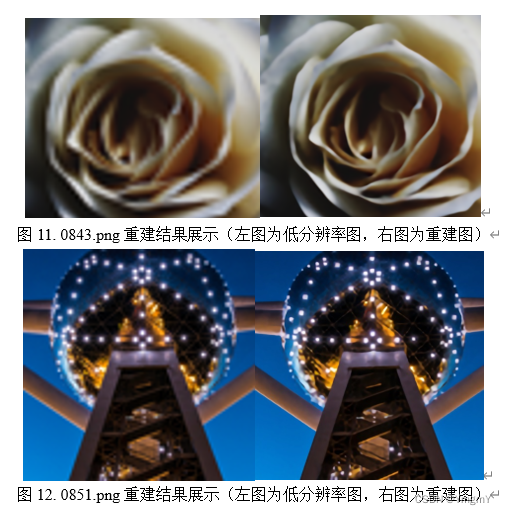
四、部分结果展示