算法只要懂原理了,代码都是小问题,先看下面理论,尤其是红色标注的(要源码请留下邮箱,有测试用例,直接运行即可)A*算法百度上的解释:A*[1](A-Star)算法是
算法只要懂原理了,代码都是小问题,先看下面理论,尤其是红色标注的(要源码请留下邮箱,有测试用例,直接运行即可)
A*算法
百度上的解释:
A*[1] (A-Star)算法是一种静态路网中求解最短路最有效的直接搜索方法。
公式表示为: f(n)=g(n)+h(n),
其中 f(n) 是从初始点经由节点n到目标点的估价函数,
g(n) 是在状态空间中从初始节点到n节点的实际代价,
h(n) 是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解的)条件,关键在于估价函数f(n)的选取:
估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。但能得到最优解。并且如果h(n)=d(n),即距离估计h(n)等于最短距离,那么搜索将严格沿着最短路径进行, 此时的搜索效率是最高的。
如果 估价值>实际值,搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
1.2Dijkstra算法与最佳优先搜索
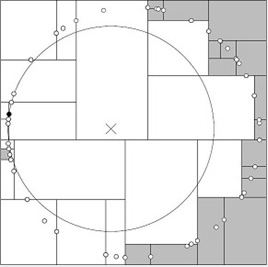
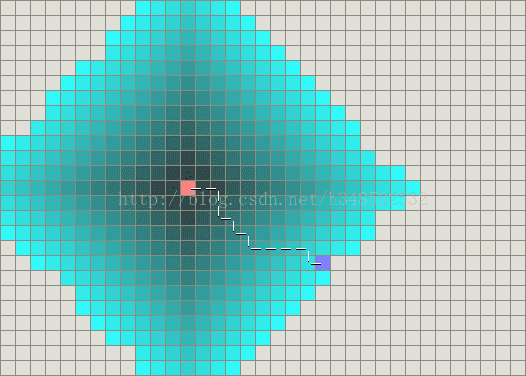
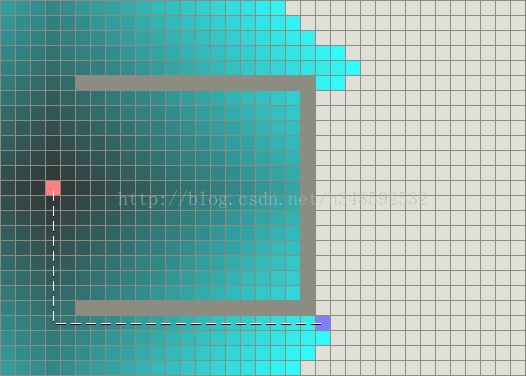
Dijkstra算法从物体所在的初始点开始,访问图中的结点。它迭代检查待检查结点集中的结点,并把和该结点最靠近的尚未检查的结点加入待检查结点集。该结点集从初始结点向外扩展,直到到达目标结点。Dijkstra算法保证能找到一条从初始点到目标点的最短路径,只要所有的边都有一个非负的代价值。(我说“最短路径”是因为经常会出现许多差不多短的路径。)在下图中,粉红色的结点是初始结点,蓝色的是目标点,而类菱形的有色区域(注:原文是teal
areas)则是Dijkstra算法扫描过的区域。颜色最淡的区域是那些离初始点最远的,因而形成探测过程(exploration)的边境(frontier):
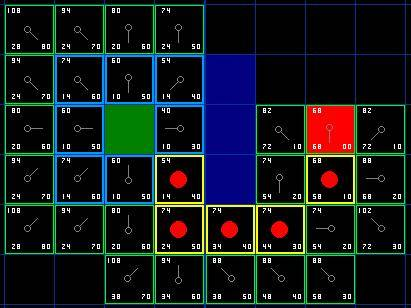
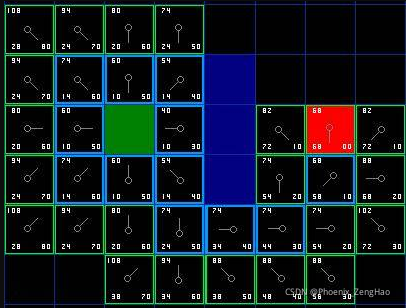
下图相同颜色的格子代表起点到达这些格子的代价是一样的,颜色越浅代表到达目标所需要的代价越大,Dijkstra算法均衡的向四面八方扩张,被扩张的每一个格子都会记住它前一个消耗最少的那个格子,直到扩张区域包含目标点
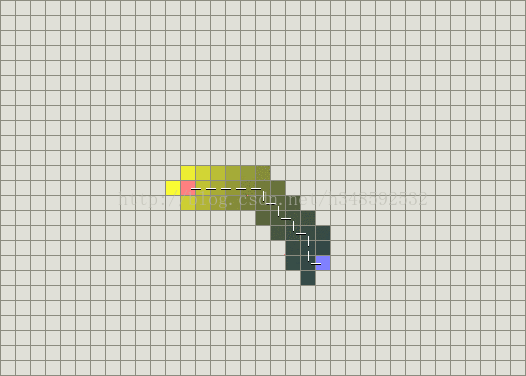
最佳优先搜索(BFS)算法按照类似的流程运行,不同的是它能够评估(称为启发式的)任意结点到目标点的代价。与选择离初始结点最近的结点不同的是,它选择离目标最近的结点。BFS不能保证找到一条最短路径。然而,它比Dijkstra算法快的多,因为它用了一个启发式函数(heuristic
function)快速地导向目标结点。例如,如果目标位于出发点的南方,BFS将趋向于导向南方的路径。在下面的图中,越黄的结点代表越高的启发式值(移动到目标的代价高),而越黑的结点代表越低的启发式值(移动到目标的代价低)。这表明了与Dijkstra算法相比,BFS运行得更快。
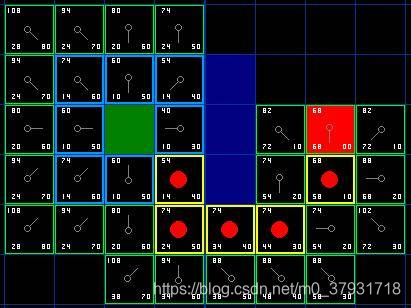
贪心算法:颜色相同的格子代表这些格子在理想状态下(没有障碍物的情况下)直线到达目标点的代价是一样的,从起点不停的像终点扩张,扩张的时候会记住前一个最小理想代价的格子如果碰到障碍物它会重新选择新的理想代价最少的那一个格子直到到达目标格子
然而,这两个例子都仅仅是最简单的情况——地图中没有障碍物,最短路径是直线的。现在我们来考虑前边描述的凹型障碍物。Dijkstra算法运行得较慢,但确实能保证找到一条最短路径:
另一方面,BFS运行得较快,但是它找到的路径明显不是一条好的路径:
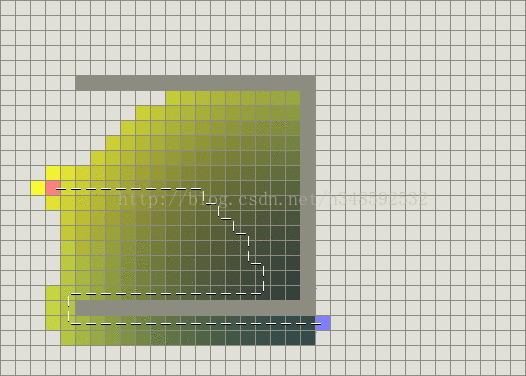
问题在于BFS是基于贪心策略的,它试图向目标移动尽管这不是正确的路径。由于它仅仅考虑到达目标的代价,而忽略了当前已花费的代价,于是尽管路径变得很长,它仍然继续走下去。
结合两者的优点不是更好吗?1968年发明的A*算法就是把启发式方法(heuristic
approaches)如BFS,和常规方法如Dijsktra算法结合在一起的算法。有点不同的是,类似BFS的启发式方法经常给出一个近似解而不是保证最佳解。然而,尽管A*基于无法保证最佳解的启发式方法,A*却能保证找到一条最短路径。
1.3A*算法
我将集中讨论A*算法。A*是路径搜索中最受欢迎的选择,因为它相当灵活,并且能用于多种多样的情形之中。