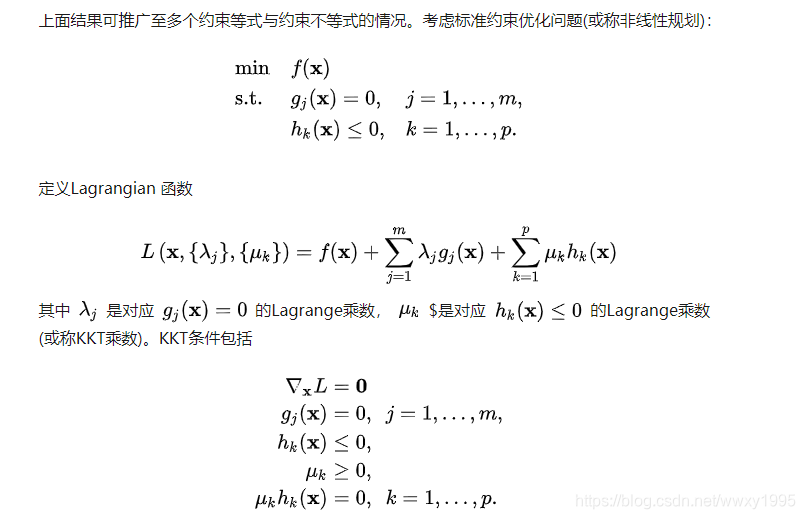
对于只有等式约束的非线性优化问题,拉格朗日定理是可以适用的,但是当存在不等式约束时就不适用了,此时Karush–Kuhn–Tucker(KKT)条件是更为通用的处理技术,拉格朗日定理其实只是KKT条件定理的特殊情况。 KKT条件一开始称为Kuhn–Tucker条件, 因为在1951年Harold W. Kuhn 和 Albert W. Tucker发表了该定理的论文,不过人们之后又发现早在1939年一个名为William Karush的学者就在他的硕士论文中涉及了该理论,所以又把他的名字加入到了该定理的命名中。该定理名字里的"条件"的意思是这个定理描述的是最优解的必要条件,也就是是说如果一个解是优化问题的最优解,那么这个解一定满足KKT条件所叙述的各种关系;按照逻辑学的理论,原命题与逆否命题等价,那么如果一个解它不满足KKT条件,那么它肯定不是最优问题的最优解;当然,如果一个解满足KKT条件,我们不能直接说它就是最优解。
二元单约束的KKT条件
先通过一个最简单的二元单个约束的优化问题来得到它的KKT条件,然后给出扩展的一般性定理;二元单个约束方面图像描述,便于理解。问题的描述:
m a x i m i z e f ( x 1 , x 2 ) s u b j e c t t o g ( x 1 , x 2 ) ≤ b \begin{aligned} maximize\quad& f(x_1,x_2)\\ subject\ to\quad& g(x_1,x_2)\leq b\\ \end{aligned} maximizesubject tof(x1,x2)g(x1,x2)≤b
如果约束是等式,可以直接应用拉格朗日定理来处理;但现在约束是不等式,无法直接应用拉格朗日定理,按照拉格朗日定理的描述,最优解是约束边界曲线与目标函数等值线的切点,但现在最优解可能出现在约束边界之内;这时我们可以这样考虑,最优解要么出现在约束区域的边界上,要么出现在边界之内,所以我们就分两种情况来分析:
情况一
先考虑最优解出现在约束边界上,那么这时原始问题就等价于:
m a x i m i z e f ( x 1 , x 2 ) s u b j e c t t o g ( x 1 , x 2 ) = b \begin{aligned} maximize\quad& f(x_1,x_2)\\ subject\ to\quad& g(x_1,x_2)= b\\ \end{aligned} maximizesubject tof(x1,x2)g(x1,x2)=b
就是只有等式约束的优化问题,自然这个问题可以直接应用拉格朗日定理来处理
D L ( x 1 ∗ , x 2 ∗ ) = D ( f ( x 1 ∗ , x 2 ∗ ) − λ g ( x 1 ∗ , x 2 ∗ ) ) = D f ( x 1 ∗ , x 2 ∗ ) − λ D g ( x 1 ∗ , x 2 ∗ ) = ( 0 , 0 ) \begin{aligned} DL(x_1^*,x_2^*)=D(f(x_1^*,x_2^*)-\lambda g(x_1^*,x_2^*))=Df(x_1^*,x_2^*)-\lambda Dg(x_1^*,x_2^*)=(0,0) \end{aligned} DL(x1∗,x2∗)=D(f(x1∗,x2∗)−λg(x1∗,x2∗))=Df(x1∗,x2∗)−λDg(x1∗,x2∗)=(0,0)
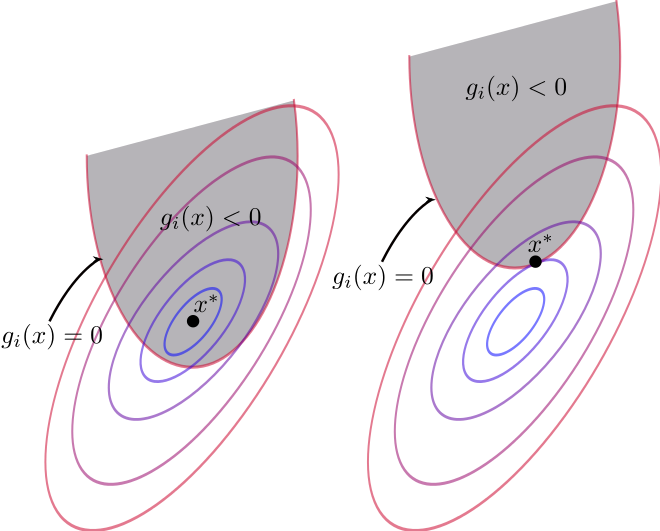
可以想象其二维的图形分布如下图所示,其最优解出现在约束曲线与目标函数等值线相切的点

但是这时我们需要额外考虑的是 λ \lambda λ的正负性,当原始问题是等式约束时是不需要考虑 λ \lambda λ的正负的,但当原始问题是不等式约束时则必须要考虑。梯度的一个重要意义是它的方向是指向函数增长(正)最快的方向,对于上图中处于约束边界上的最优解的点,它在约束函数 g ( x 1 , x 2 ) − b g(x_1,x_2)-b g(x1,x2)−b上的梯度 D g ( x 1 ∗ , x 2 ∗ ) Dg(x_1^*,x_2^*) Dg(x1∗,x2∗)应该是指向约束边界外围,因为在约束边界上 g ( x 1 ∗ , x 2 ∗ ) − b = 0 g(x_1^*,x_2^*)-b=0 g(x1∗,x2∗)−b=0,而约束外围则是 g ( x 1 ∗ , x 2 ∗ ) − b > 0 g(x_1^*,x_2^*)-b>0 g(x1∗,x2∗)−b>0,函数值是增大的:

再来考虑目标函数上的梯度 D f ( x 1 ∗ , x 2 ∗ ) Df(x_1^*,x_2^*) Df(x1∗,x2∗),它应该指向约束区域内部还是外部呢? 如果它指向约束内部,那么就意味着我们可以在约束内部找到一个更好的解,因为在约束内部的解是满足原始问题的约束的,同时它处于目标函数的梯度方向上,它的目标值也更大,这个结论将与我们的假设前提相悖;所以目标函数的梯度 D f ( x 1 ∗ , x 2 ∗ ) Df(x_1^*,x_2^*) Df(x1∗,x2∗)必须也是指向约束区域外部的;所以 D f ( x 1 ∗ , x 2 ∗ ) Df(x_1^*,x_2^*) Df(x1∗,x2∗)和 D g ( x 1 ∗ , x 2 ∗ ) Dg(x_1^*,x_2^*) Dg(x1∗,x2∗)应该是同向的,同向也就意味着 λ \lambda λ必定是大于等于零的。

总结一下,当最优解出现在约束边界上时,最优解的必要条件是:
∂ L ∂ x 1 ∗ = ∂ f ∂ x 1 ∗ − λ ∂ g ∂ x 1 ∗ = 0 ∂ L ∂ x 2 ∗ = ∂ f ∂ x 2 ∗ − λ ∂ g ∂ x 2 ∗ = 0 g ( x 1 ∗ , x 2 ∗ ) = b λ ≥ 0 \begin{aligned} \frac{\partial L}{\partial x_1^*}=\frac{\partial f}{\partial x_1^*}-\lambda\frac{\partial g}{\partial x_1^*}=0\\ \frac{\partial L}{\partial x_2^*}=\frac{\partial f}{\partial x_2^*}-\lambda\frac{\partial g}{\partial x_2^*}=0\\ g(x_1^*,x_2^*)=b\\ \lambda \geq 0 \end{aligned} ∂x1∗∂L=∂x1∗∂f−λ∂x1∗∂g=0∂x2∗∂L=∂x2∗∂f−λ∂x2∗∂g=0g(x1∗,x2∗)=bλ≥0
情况二
再来考虑最优解出现在约束边界内即 g ( x 1 , x 2 ) < b g(x_1,x_2)< b g(x1,x2)<b的情况。
当我们假设最优解就是出现在约束边界之内时,这个约束加不加其实不影响结果,原始问题就等价于无约束优化问题,它们的最终解是一样的:
m a x i m i z e f ( x 1 , x 2 ) s u b j e c t t o g ( x 1 , x 2 ) < b ⟺ m a x i m i z e f ( x 1 , x 2 ) \begin{aligned} maximize\quad& f(x_1,x_2)\\ subject\ to\quad& g(x_1,x_2)< b\\ \end{aligned} \Longleftrightarrow \begin{aligned} maximize\quad& f(x_1,x_2)\\ \end{aligned} maximizesubject tof(x1,x2)g(x1,x2)<b⟺maximizef(x1,x2)
因为最优解就是无约束时的目标函数最优值,那么必然满足
D f ( x 1 ∗ , x 2 ∗ ) = ( 0 , 0 ) ⟺ ∂ f ∂ x 1 ∗ = 0 ∂ f ∂ x 2 ∗ = 0 Df(x_1^*,x_2^*)=(0,0) \Longleftrightarrow \begin{aligned} \frac{\partial f}{\partial x_1^*}=0\\ \frac{\partial f}{\partial x_2^*}=0 \end{aligned} Df(x1∗,x2∗)=(0,0)⟺∂x1∗∂f=0∂x2∗∂f=0
那这时 λ \lambda λ的值是如何呢? 它应该等于零,这个结论老实说我不太清楚严格的数学证明是如何的,我是这样简单理解的:因为无约束优化问题其实也可以写成等式约束形式,不过约束的系数是零:
m a x i m i z e f ( x 1 , x 2 ) s u b j e c t t o g ′ ( x 1 , x 2 ) = 0 ∗ g ( x 1 , x 2 ) = 0 \begin{aligned} maximize\quad& f(x_1,x_2)\\ subject\ to\quad& g'(x_1,x_2)=0*g(x_1,x_2)= 0\\ \end{aligned} maximizesubject tof(x1,x2)g′(x1,x2)=0∗g(x1,x2)=0
把它化成拉格朗日函数:
L ( x 1 , x 2 , λ ′ ) = f ( x 1 , x 2 ) − λ ′ g ′ ( x 1 , x 2 ) = f ( x 1 , x 2 ) − ( λ ′ ∗ 0 ) g ( x 1 , x 2 ) L(x_1,x_2,\lambda ')=f(x_1,x_2)-\lambda 'g'(x_1,x_2)=f(x_1,x_2)-(\lambda '* 0)g(x_1,x_2) L(x1,x2,λ′)=f(x1,x2)−λ′g′(x1,x2)=f(x1,x2)−(λ′∗0)g(x1,x2)
它也就是原问题(指的是约束只有 < < <号的问题模型)的拉格朗日函数,所以原问题的 λ \lambda λ就等于零,并且原问题对应的拉格朗日函数也满足:
D L ( x 1 ∗ , x 2 ∗ ) = D ( f ( x 1 ∗ , x 2 ∗ ) − λ g ( x 1 ∗ , x 2 ∗ ) ) = D f ( x 1 ∗ , x 2 ∗ ) = ( 0 , 0 ) \begin{aligned} DL(x_1^*,x_2^*)=D(f(x_1^*,x_2^*)-\lambda g(x_1^*,x_2^*))=Df(x_1^*,x_2^*)=(0,0) \end{aligned} DL(x1∗,x2∗)=D(f(x1∗,x2∗)−λg(x1∗,x2∗))=Df(x1∗,x2∗)=(0,0)
总结一下,当最优解出现在约束边界之内时,满足:
∂ L ∂ x 1 ∗ = ∂ f ∂ x 1 ∗ − λ ∂ g ∂ x 1 ∗ = 0 ∂ L ∂ x 2 ∗ = ∂ f ∂ x 2 ∗ − λ ∂ g ∂ x 2 ∗ = 0 g ( x 1 ∗ , x 2 ∗ ) < b λ = 0 \begin{aligned} \frac{\partial L}{\partial x_1^*}=\frac{\partial f}{\partial x_1^*}-\lambda\frac{\partial g}{\partial x_1^*}=0\\ \frac{\partial L}{\partial x_2^*}=\frac{\partial f}{\partial x_2^*}-\lambda\frac{\partial g}{\partial x_2^*}=0\\ g(x_1^*,x_2^*)<b\\ \lambda = 0 \end{aligned} ∂x1∗∂L=∂x1∗∂f−λ∂x1∗∂g=0∂x2∗∂L=∂x2∗∂f−λ∂x2∗∂g=0g(x1∗,x2∗)<bλ=0
汇总
两种情况的结论其实差异之处就在于要么是 g ( x 1 ∗ , x 2 ∗ ) = b g(x_1^*,x_2^*)=b g(x1∗,x2∗)=b,要么是 λ = 0 \lambda=0 λ=0,可以用一个等式来描述:
λ [ g ( x 1 , x 2 ) − b ] = 0 \lambda [g(x_1,x_2)-b]=0 λ[g(x1,x2)−b]=0
这个等式一般称之为互补松弛条件(complementary slackness condition)
现在,我们可以给出二元单约束情况下的KKT条件:
- 假设 f f f和 g g g都是 C 1 C^1 C1(一阶可导)函数, ( x 1 ∗ , x 2 ∗ ) (x_1^*,x_2^*) (x1∗,x2∗)是函数 f f f在约束集 { ( x 1 , x 2 ) ∈ R 2 : g ( x 1 , x 2 ) ≤ b } \{(x_1,x_2)\in \mathbb{R}^2: g(x_1,x_2)\leq b\} {(x1,x2)∈R2:g(x1,x2)≤b}下的最优解,并且满足 ∂ g ∂ x 1 ∗ ≠ 0 o r ∂ g ∂ x 2 ∗ ≠ 0 \frac{\partial g}{\partial x_1^*}\neq0\ or\ \frac{\partial g}{\partial x_2^*}\neq0 ∂x1∗∂g=0 or ∂x2∗∂g=0 , 那么一定存在 λ ∗ \lambda^* λ∗使得以下关系成立:
D f ( x 1 ∗ , x 2 ∗ ) − λ ∗ D g ( x 1 ∗ , x 2 ∗ ) = ( 0 , 0 ) λ ∗ ≥ 0 λ ∗ [ g ( x 1 ∗ , x 2 ∗ ) − b ] = 0 \begin{aligned} Df(x_1^*,x_2^*)-\lambda^*Dg(x_1^*,x_2^*)&=(0,0) \\ \lambda^*&\geq 0\\ \lambda^*[g(x_1^*,x_2^*)-b]&=0 \end{aligned} Df(x1∗,x2∗)−λ∗Dg(x1∗,x2∗)λ∗λ∗[g(x1∗,x2∗)−b]=(0,0)≥0=0
一般性的KKT条件
完整的KKT条件我直接从资料中摘录,当然证明过程就忽略,只记录下结论。为了定理的叙述,先明确一些定义:
- 定义一般性的优化问题为:
m a x x { f ( x : x ∈ U ) } w h e r e : U = { x ∈ R n : g 1 ( x ) ≤ b 1 , . . . , g k ( x ) ≤ b k } \begin{aligned} &max_\mathtt{x}\{f(\mathtt{x}:\mathtt{x}\in U)\} \\ where:&U=\{\mathtt{x}\in \mathbb{R}^n : g_1({\mathtt{x}})\leq b_1,...,g_k({\mathtt{x}})\leq b_k \} \\ \end{aligned} where:maxx{f(x:x∈U)}U={x∈Rn:g1(x)≤b1,...,gk(x)≤bk} - 对于某一个不等式约束 g i ( x ) ≤ b i g_i(\mathtt{x})\leq b_i gi(x)≤bi,如果一个可行解 x ′ \mathtt{x}' x′ 正好满足 g i ( x ) = b i g_i(\mathtt{x})= b_i gi(x)=bi时称该约束是激活的(binding),反之称之为未激活(not binding)
- 引入乘子 λ 1 , λ 2 , . . . , λ k \lambda_1,\lambda_2,...,\lambda_k λ1,λ2,...,λk,构成拉格朗日函数:
L ( x , λ ) = f ( x ) − λ 1 [ g 1 ( x ) − b 1 ] − . . . − λ k [ g k ( x ) − b k ] L(\mathtt{x},\mathtt{\lambda})=f(\mathtt{x})-\lambda_1[g_1(\mathtt{x})-b_1]-...-\lambda_k[g_k(\mathtt{x})-b_k] L(x,λ)=f(x)−λ1[g1(x)−b1]−...−λk[gk(x)−bk] - 对于某个可行解 x ′ \mathtt{x}' x′,我们假设前面 e e e个约束对于它是激活的,剩余的 k − e k-e k−e个约束是未激活的;这 e e e个激活约束可以构成一个雅可比矩阵:
D g e ( x ) = [ ∂ g 1 ∂ x 1 ⋯ ∂ g 1 ∂ x n ⋮ ⋱ ⋮ ∂ g e ∂ x 1 ⋯ ∂ g e ∂ x n ] D\mathtt{g}_e(\mathtt{x})= \begin{bmatrix} \frac{\partial g_1}{\partial x_1}&\cdots&\frac{\partial g_1}{\partial x_n}\\ \vdots&\ddots&\vdots\\ \frac{\partial g_e}{\partial x_1}&\cdots&\frac{\partial g_e}{\partial x_n}\\ \end{bmatrix} Dge(x)=⎣⎢⎡∂x1∂g1⋮∂x1∂ge⋯⋱⋯∂xn∂g1⋮∂xn∂ge⎦⎥⎤
如果 D g e ( x ′ ) D\mathtt{g}_e(\mathtt{x}') Dge(x′)是满秩矩阵(秩等于 e e e),那么称该可行解 x ′ \mathtt{x}' x′满足NDCQ条件
然后我们有完整的KKT条件定理:
- f , g 1 , . . . , g k f,g_1,...,g_k f,g1,...,gk是 C 1 C^1 C1函数(一阶偏导),如果 x ∗ \mathtt{x}^* x∗是优化问题的最优解,并且满足NDCQ条件,那么一定存在乘子 λ 1 , λ 2 , . . . , λ k \lambda_1,\lambda_2,...,\lambda_k λ1,λ2,...,λk使得下面的关系成立:
D f ( x ∗ ) − ∑ i = 1 k λ i ∗ D g i ( x ∗ ) = ( 0 , . . . , 0 ) λ 1 ∗ ≥ 0 , . . . , λ k ∗ ≥ 0 λ 1 ∗ [ g 1 ( x ∗ ) − b 1 ] = 0 , . . . , λ k ∗ [ g k ( x ∗ ) − b k ] = 0 \begin{aligned} Df(\mathtt{x}^*)-\sum_{i=1}^{k}\lambda_i^*Dg_i(\mathtt{x}^*)=(0,...,0) \\ \lambda_1^*\geq 0,...,\lambda_k^*\geq 0\\ \lambda_1^*[g_1(\mathtt{x}^*)-b_1]=0,...,\lambda_k^*[g_k(\mathtt{x}^*)-b_k]=0 \end{aligned} Df(x∗)−i=1∑kλi∗Dgi(x∗)=(0,...,0)λ1∗≥0,...,λk∗≥0λ1∗[g1(x∗)−b1]=0,...,λk∗[gk(x∗)−bk]=0