1-相机分类

2-以像素数选择(高像素型或标准型)
从“像素分辨率”这一点来添加良否判定的基准,可选择最佳像素数的相机!
视觉系统所使用的 CCD 拍摄元件是以格子状排列的较小像素的集合体。在作为标准型经常使用的 31 万像素 CCD 中,存在称为高像素型的 200 至 2100 万像素 CCD。
一般从 “视野尺寸” 和 “像素分辨率” 两点来选择相机。
“视野尺寸” 在拍摄检测目标物的范围内,可通过要使用的镜头进行变更。此外, “像素分辨率” 是指 “CCD 的 1 像素相当于多少 mm”,并通过以下公式表示各自的关系。

那么,尝试考虑设为 Y 方向 30 mm 的视野尺寸时的像素分辨率。即使 CCD 包含在标准型 31 万像素(Y=480 像素,即通常说的640-480相机)和高像素型中,仍可使用通用的 200 万像素(Y=1200 像素)。
即【
- 使用 31 万像素相机时的像素分辨率】= 30 mm÷480 像素= 0.063 mm/ 像素
- 【使用 200 万像素相机时的像素分辨率】= 30 mm÷1200 像素= 0.025 mm/ 像素。
只要知道像素分辨率,即可计算出此时的视野尺寸基准。 - 视觉系统代表性的应用案例有**“外观检测”和“尺寸检测”**,在“外观检测” 时使用“最小检测尺寸” 来良否判定;
- 在“尺寸检测” 时则使用“尺寸公差”。
各自的基准一般以

根据之前计算出的像素分辨率可求出 “外观检测” 时的 “最小检测尺寸”
即
- 【使用 31 万像素相机时的最小检测尺寸】= 0.063 mm/ 像素 ×4 像素见方= 0.25 mm 见方
- 【使用 200万像素相机时的最小检测尺寸】= 0.025 mm/ 像素 ×4 像素见方= 0.1 mm 见方
如果是 “希望在视野 30 mm 内检测出最大 ø0.1 mm 异物” 的检测内容,则需要选择 200 万像素以上的相机。

3-根据 CCD 类型选择(彩色型或黑白型)
通过辨别出希望检测的点是“色调变化”还是“亮度变化”,可区分使用彩色相机和黑白相机!
彩色相机还是黑白相机,该选哪一种才好呢? ” 我们常听到这样的问题。
一般如果希望检测的点因“色调变化” 出现差异,则使用彩色相机会具有优势。
以下是使用颜色处理来检测黑白相机难以检测的白底黄色污点的示例。

但是,存在选择黑白相机的优点。
如以下“使用背光灯的尺寸测量” 所示,并非“色调变化”,而是在“亮度变化” 出现较大差异时也可选择黑白相机。
4-根据传输速度选择(高速型或标准型)
选择高速相机的优点不仅具备“检测效率的高速化”,而且还可进行“稳定处理”!
即使视觉系统的相机像素数相同,传输速度仍存在高速型。以 31 万像素类型为例,对于标准型的传输速度 16.0 ms 来说,高速型可实现 4.7 ms 的传输速度。通过部分拍摄功能也可实现更进一步的高速化。除了高速生产线,在普通速度的生产线检测中,如果希望进行 “追加预处理” “追加检测工具的双重检查” 等进一步提高稳定性的检测,则选择高速型会非常有效。

5-根据相机尺寸选择(小型或标准型)
小型相机规格不变,是大幅缩小相机尺寸的产品。高像素型、标准型的彩色、黑白相机均存在小机型,基本上用于有效活用受限安装空间。尤其是在后装到现有设备等没有空间的情况下,无需大幅改造设备,因此具有选择小型相机的优势。

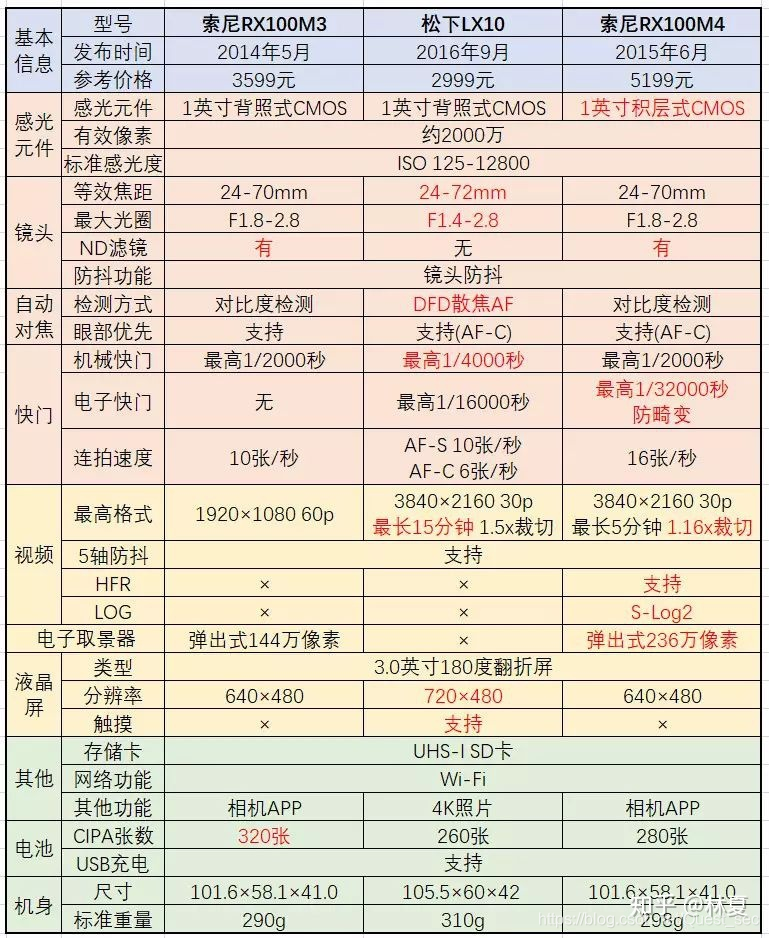
6-附表
基恩士CCD相机参考表