主要分为三部分
1.相机示意图及基本结构
2.相机参数确定方法
3.最终选择
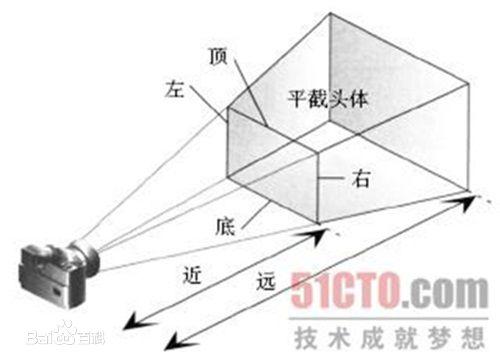
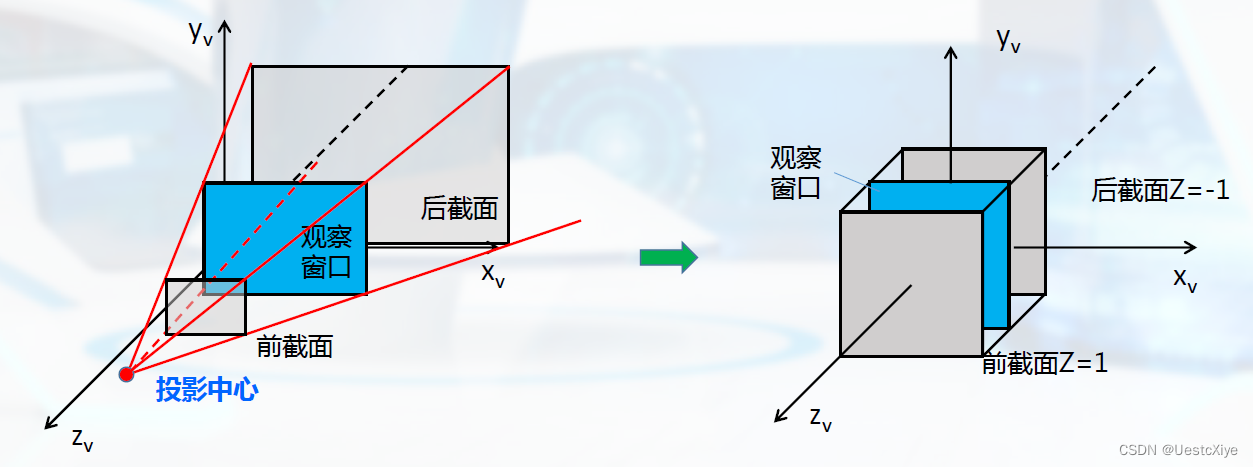
1.相机示意图及基本结构

简图↑

全图↑

光圈与景深↑
2.相机基本参数确定
视野与像素确定
被检测石英镜片的最大直径为38.6mm。也就是最大弥散圆直径。

样品↑

较小划痕样本↑

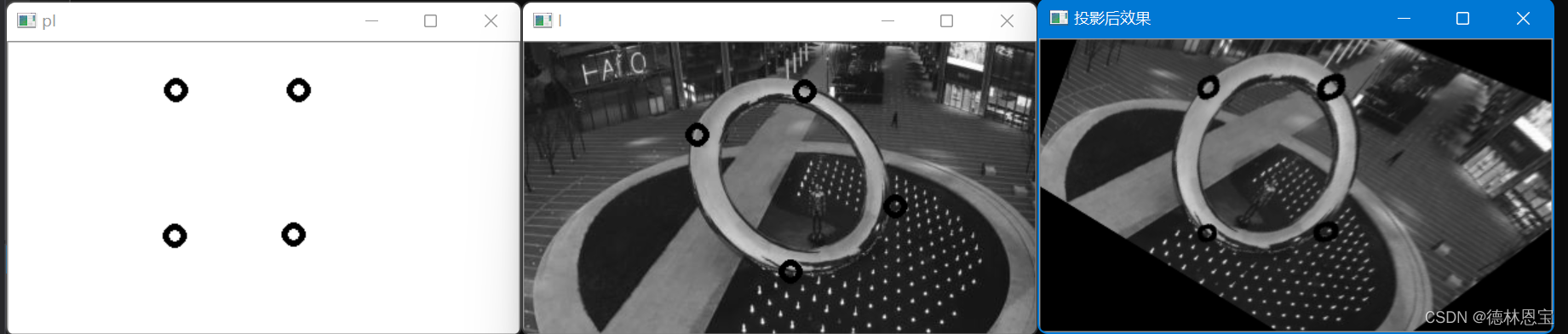
划痕测量↑
如上图,以直径为28.3的镜片来计算像素大小。相较于缺口,划痕的宽度更小,更不容易识别。相机的像素确定将基于划痕。由图可以看出,一个方格的大小基本跟划痕宽度大小相匹配。一个方框即可以作为一个像素点。像素大小为



为了获得更清晰的图像,便于后期进行图像处理,用四个像素点来描述一个划痕宽度,得到更为合适的分辨率

至此,像素参数确定,应选择至少45万像素相机。相机视野应能调整到50MM*50MM。
相机分辨率选择的过程基本为:1、确定精度要求最高的部分需要的像素数;2、计算整个图像需要的像素数;3、确定合适的分辨率;然后就能够得到所需相机的分辨率了,分辨率是一个相机主要的参数。
像素深度
像素深度常见的有8bit,10bit,12bit 现阶段无太大要求。以通用性强为主,主选8bit。
相机种类
CCD相机在今天还是占据工业视觉的很大一部分市场。CMOS相机虽然性能较差一点,但是目前项目来说也是可以接受的。主要后期性价比。
最大帧率/行频
现阶段无要求。机械手速度要远比相机速度要慢。主要看价格。
像元尺寸
只要不是太夸张,现有尺寸安装还是很容易。无要求。
3、相机型号确定
以上是主要的相机参数,相机参数确定之后,就可以根据这些参数,选择常用的相机品牌下的相机参数了。