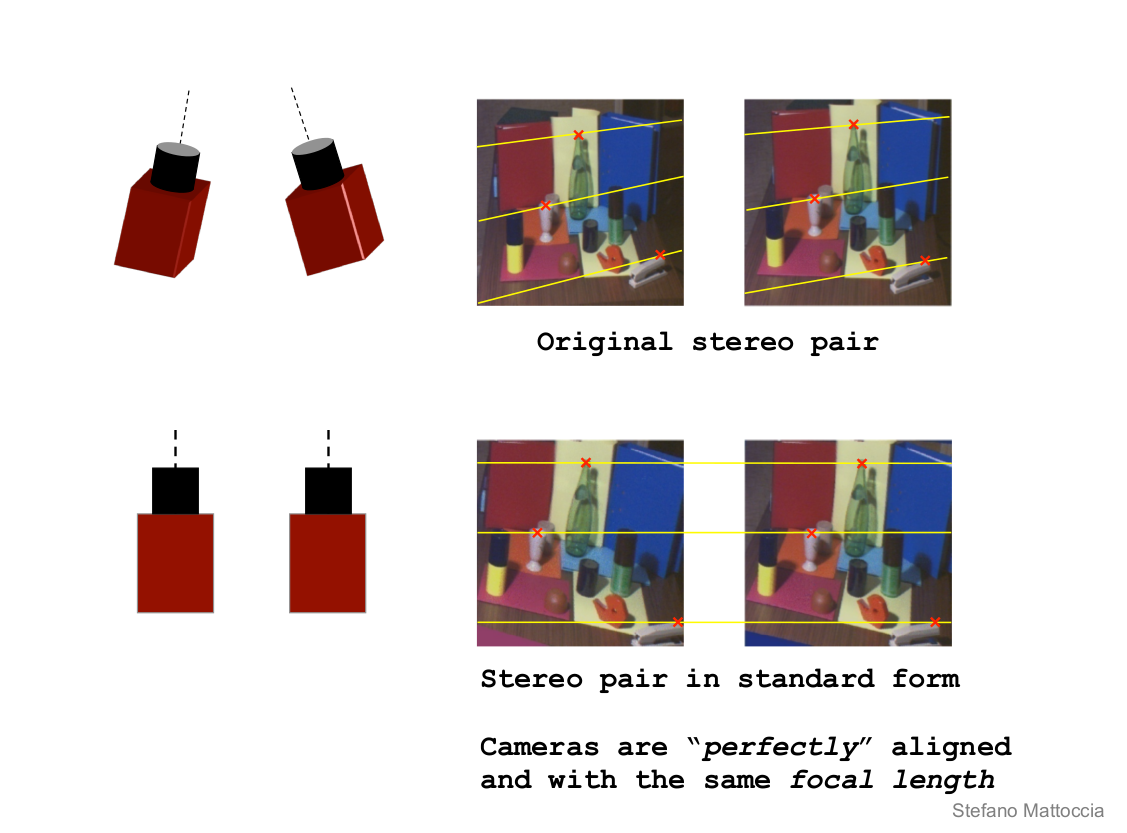
如上所述,这就是双目立体视觉的简化模型,这里双目有了,那为何叫立体视觉呢?其实这双目立体视觉还得从人眼说起,咱们人不就是双目吗?我看平时看到的景物都是立体的,这最根本的原因就是我们大脑根据两个眼睛采集到的图像,左右图像之间存在水平视差,这就产生了立体效果。具体可以这样解释:我们平时看东西肯定知道,远处的物体显得小一些,而近处的物体大一些,这也是人判断远近(深度)的依据,也就是说,我们人眼(摄像机)左右分别对同一场景成像,那么如以左图像为准,右图像中的同名物体就相当于向左平移了一定距离,这就是水平视差。并且,远处的物体平移距离小,近处的物体平移距离大,这样就有了远近的区别,也就是场景的深度信息。

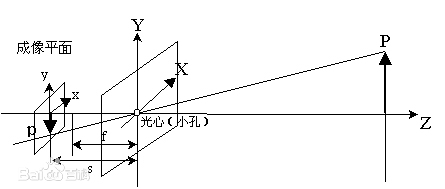
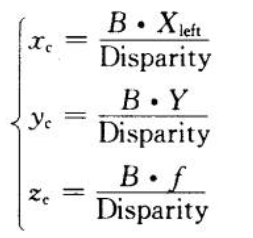
如下的坐标系统下,我们可以推算出物体深度来,如下所示,以一个摄像机为例:

其中, [u,v,1]'是空间一点M的像点m在图像坐标系下的齐次坐标, A是摄像机的内参数矩阵, B是外参数矩阵, P是3×4矩阵,M(一弯)叫投影矩阵, 表示M在世界坐标系下的齐次坐标。这样,完全可以推算出空间一点在摄像机坐标下的深度坐标Zc,再结合双目立体视觉系统坐标系,便可以求出物点在空间世界坐标下的深度了。
以上是整个双目立体视觉系统的大致介绍,由于时间及版面关系我只是取了其中一部分来讲,希望有兴趣的博友可以跟我更进一步的交流,谢谢!
********************************
*******************************
摄像机是3D 空间和2D 图像之间的一种映射, 该映射关系是由摄像机的几何模型决定的,即通常所称的摄像机参数, 是表征摄像机映射的具体性质的矩阵。求解这些参数的过程被称为摄像机标定。摄像机标定的方法根据是否需要标定物可分为传统摄像机标定方法、摄像机自标定方法以及基于主动视觉的标定方法。本文采用的是传统摄像机标定的方法中的利用最优化算法的方法。