系列文章:
- 双目视觉(一)双目视觉系统
- 双目视觉(二)双目匹配的困难和评判标准
- 双目视觉(三)立体匹配算法
- 双目视觉(四)匹配代价
- 双目视觉(五)立体匹配算法之动态规划全局匹配
- 双目视觉(六)U-V视差
- 双目视觉(七)稀疏双目匹配
- 【项目实战】利用U-V视差进行地面检测
- 【项目实践】U-V视差路面检测之动态规划
1.双目匹配时面临的困难
在双目视觉中立体匹配经过半个世纪的发展,已经取得很多研究成果,但依然面临各种各样的难点与挑战。一般立体匹配算法受以下几方面影响,这也是国内外学者一直需要解决的关键问题:包括立体匹配受本身内在因素的影响,同时也受到外界环境的影响(即外在因素)以及算法精度与运行时间问题,使得在实际应用中还存在一定的局限性。


光学失真
表面反光
缩放
透视变换造成的失真
缺少纹理的区域(白墙)
重复出现
透明的物体
遮挡









2.双目匹配的评价标准
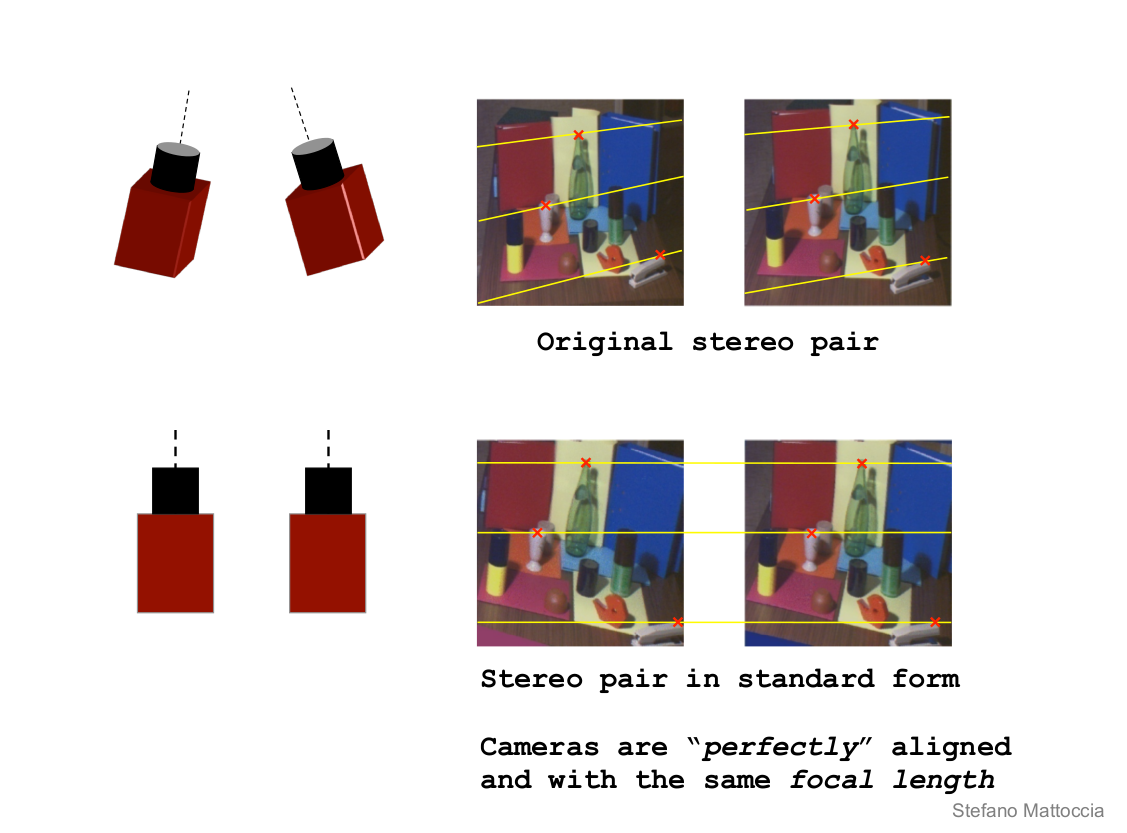
在 2002 年以前,虽然立体匹配算法得到很大的发展,但却没有一个统一的标准来评估算法的好坏。所以 Scharstein 和 Szelisk开发了在线评估平台Middlebury(vision.middlebury.edu/stereo) 网站,该平台提供了四组标准的立体匹配图像数据,分别为 Tsukuba、Venus、Teddy 和 Cones
这些图片都是在不同环境下拍摄的,而且都经过外极线校正所得,并同时给出四组图像的真实视差图(Ground truth
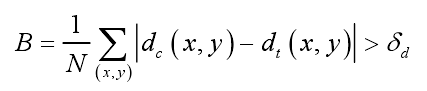
image)作为参考,通过将上传到网站的算法和真实视差结果进行分析对比,从而得到准确的算法评估数据,同时为了对算法进行定量的评估,提出了均方根误差和误匹配率两大指标进行分析:
- 均方根误差法 RMS(root-mean-squared)
- 误匹配率 PBM(Percentage of bad matching pixels)
在对立体匹配算法进行误差计算评测时,通常用 Middleburry 评测网站给出三类典型区域进行划分,如非遮挡区域误匹配率(nonocc)、所有像素点的误匹配率(all)、视差不连续区域误匹配率(disc),对这些区域利用上述公式计算误差率,再通过计算整幅图像的平均误差率对上传的图像进行整体评估,并得到在网站中的公开排名。