文章目录
- 前言
- ADC配置
- AdcGroupRequestSource
- AdcGroupTriggSrc
- AdcHwExtTrigSelect
- AdcHwGatePin
- AdcGeneral-AdcHwTriggerApi
- AdcHwGateSignal
- AdcHwTrigSignal
- AdcHwTrigType
- Gtm
- GtmConnections
- PWM
- 实际使用
- 总结
前言
在实际项目开发过程中,关于ADC采样,大部分使用软件触发即可,但是在特定情况下,需要应用到硬件触发采样,如在测量电流时,可能就需要使用到ADC的硬件触发功能。本文基于Davinci cfg及TC27x芯片,介绍如何配置通过PWM触发ADC采样。
ADC配置
在之前的一篇文章中,介绍了ADC的大部分配置,传送门:Autosar MCAL-ADC详解(二)-基于Tc27x的cfg软件
下面介绍和硬件触发相关的配置
AdcGroupRequestSource
REQSRC0_8STG_QUE对应Group Queued source
REQSRC1_NCH_SCAN对应Group Scan source
REQSRC2_BGND_SCAN对应Background Scan source
此处我们选择REQSRC0_8STG_QUE,在芯片手册中对于Group Queued source有如下流程图:
此处很清楚的可以看到,对于硬件触发来说,我们要配置trigger inputs和gating inputs的来源。在后面的配置项中介绍。关于其他请求源,可以参考芯片手册。
cfg中配置:

AdcGroupTriggSrc
此处选择HW触发
cfg中配置:

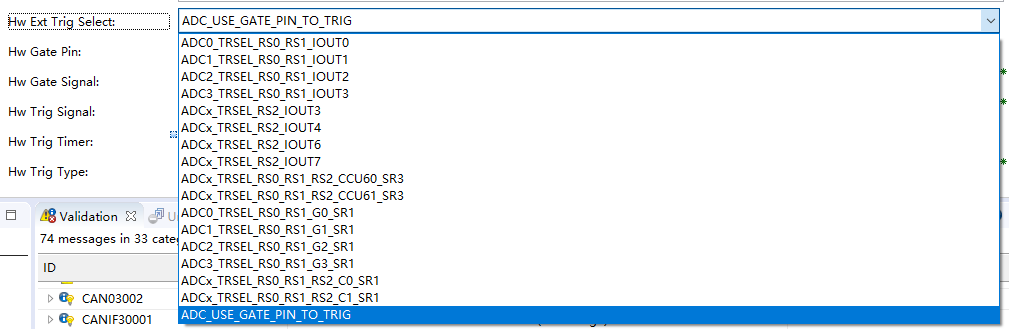
AdcHwExtTrigSelect
由Group Queued source图可知,该trigger可以由REQTRx[H:A]输入,也可以由gating的pin直接输入。
对于trigger的选择,在芯片手册中有如下定义:
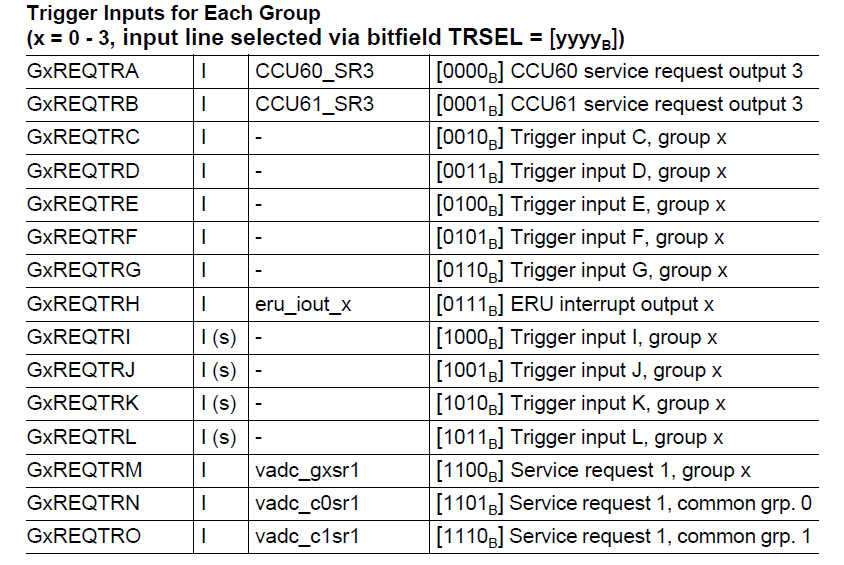
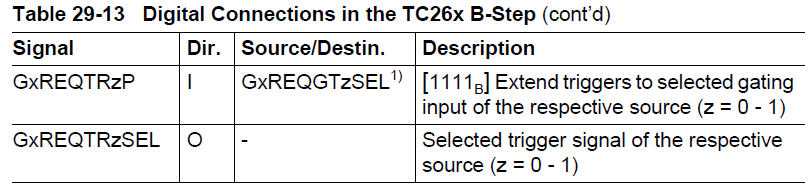
此处我们选择trigger由gating input。
cfg中配置:
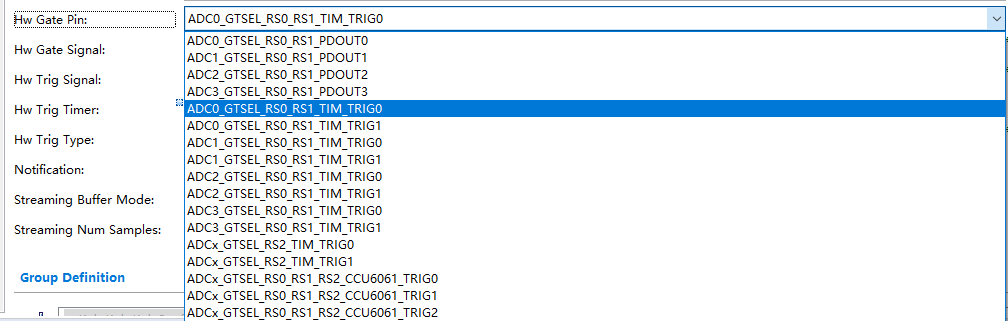
AdcHwGatePin
配置Gating pin,在芯片手册中有如下定义:
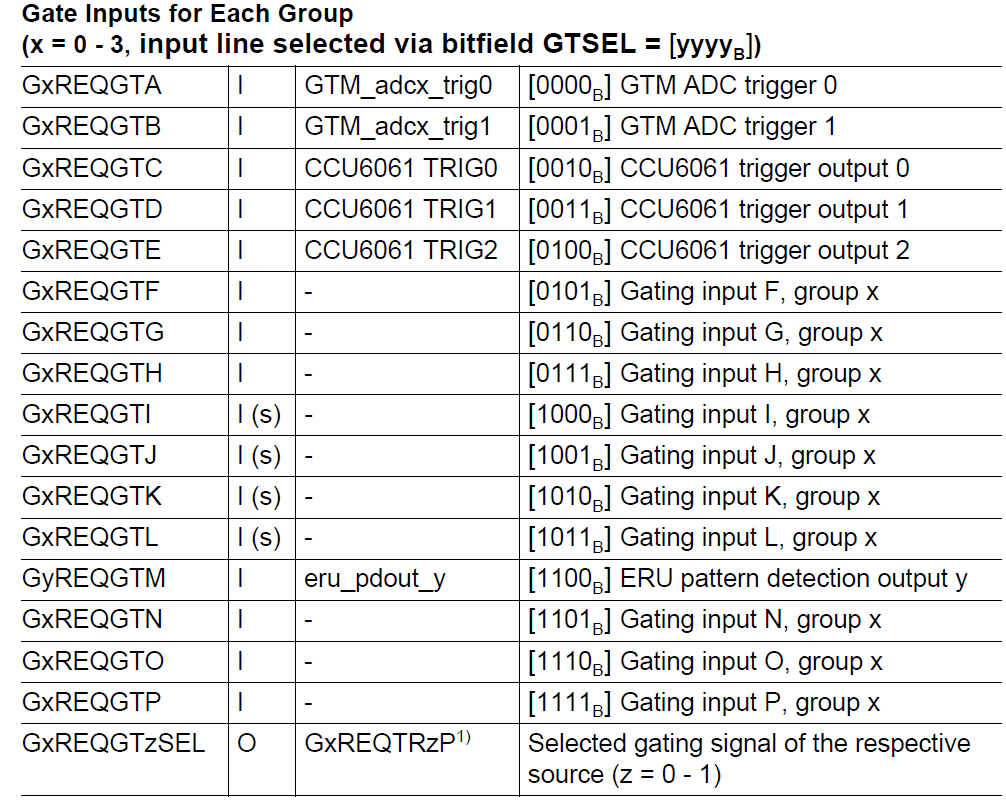
此处我们选择GTM_adcx_trig0。
cfg配置:
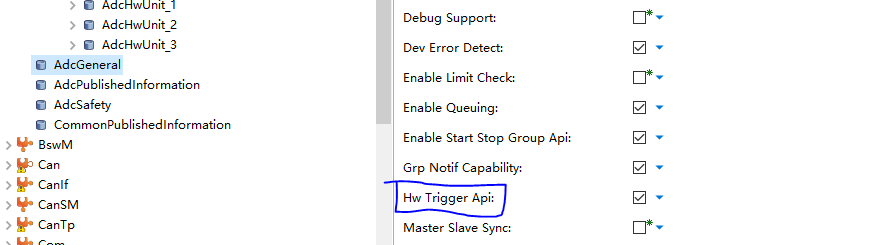
AdcGeneral-AdcHwTriggerApi
要使用HW触发ADC,需要使用该API函数。
cfg中配置:
AdcHwGateSignal
此处我们使用的是gate pin作为trigger,且使用PWM波的上升沿触发,这里配置NONE即可,不关心Gate的输入,只关心跳变沿
在芯片手册中对应的寄存器为:
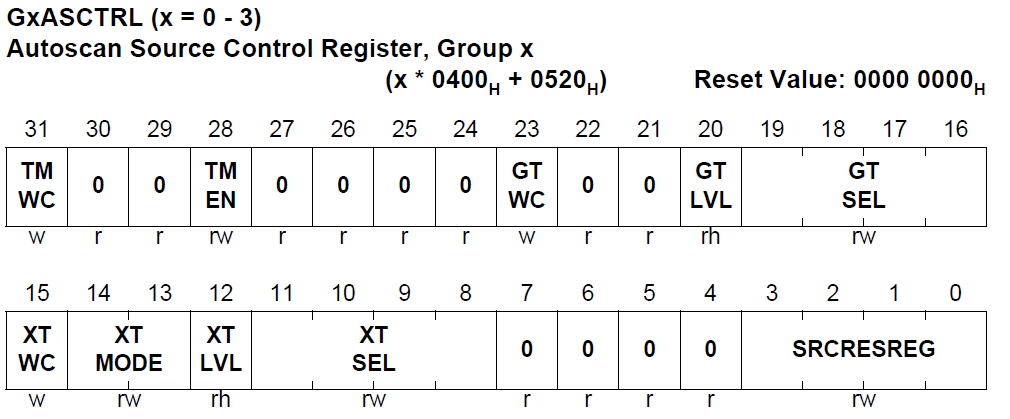
对应的位为:

cfg中配置:

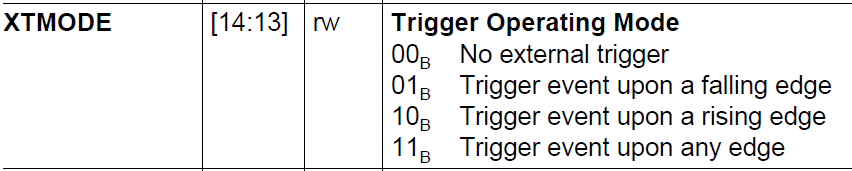
AdcHwTrigSignal
此处我们选择PWM上升沿触发,具体触发点在PWM中配置duty实现。
在芯片手册中对应的位为:
cfg中配置:

AdcHwTrigType
此处配置为外部触发

Gtm
GtmConnections
现在需要将对应的PWM通道(TOM)和ADC映射,在手册中有如下映射关系:
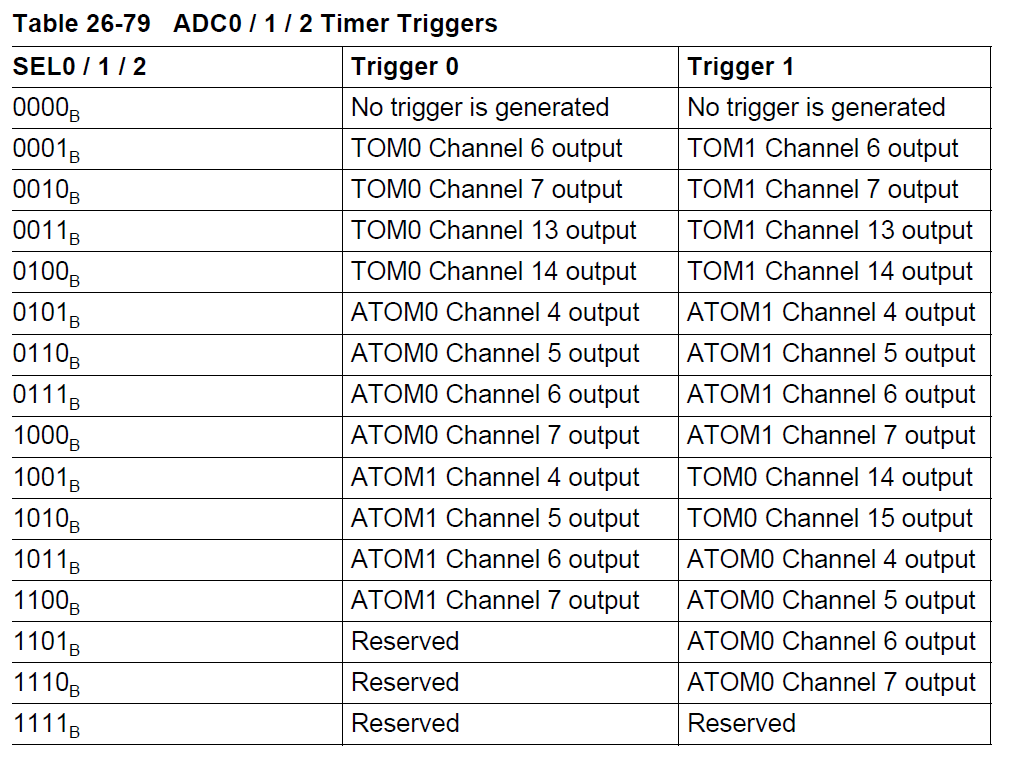
该对应关系存在于GTM模块中,配置也是在这个模块中配置。
此处我们采用TOM Channel6作为trigger0
cfg中配置:
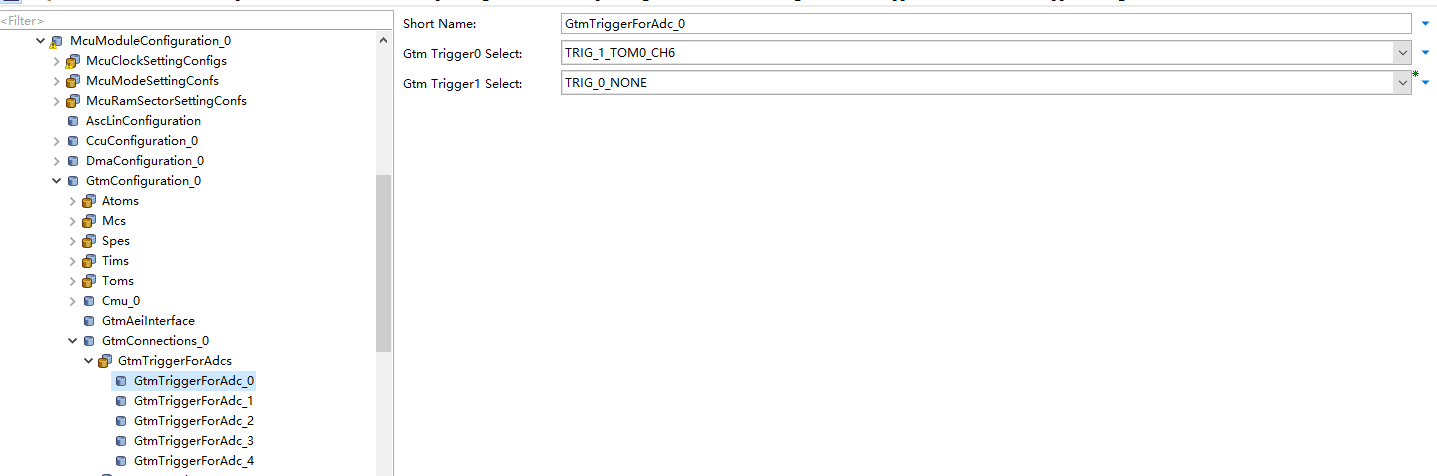
对应的生成代码对应的值:
static const uint8 Gtm_kAdcConnections0[GTM_NO_OF_ADC_MODULES] =
{0x01U, 0x00U, 0x00U, 0x00U, 0x00U,
};PWM
需要配置对应的PWM模块关联对应的TOM模块
之前有介绍过PWM模块的配置,具体可以参考:
Autosar PWM配置及使用
实际使用
ADC初始化时使用Adc_EnableHardwareTrigger函数允许ADC硬件触发
Adc_EnableHardwareTrigger(AdcGroupId);软件运行过程中对相应通道的ADC采样进行处理。
总结
以上介绍了PWM硬件触发ADC的配置项。在实际使用中,可以按照自己的需求来修改。
若你觉得本文对你有帮助,欢迎点赞,关注,收藏,转发~~~ 你的鼓励是对小弟的最大支持~~~
建了一个WX公众h,《汽车电子学习笔记》感兴趣可以关注一下~~~文章都会同步更新





![TC397 EB MCAL开发从0开始系列 之 [1.0]-MCAL结构及Demo介绍](https://img-blog.csdnimg.cn/75d3593ef5cc41ad8151485fc8bb69d0.png#pic_center)


![[ 搞一点AutoSar ]基于EB的MCAL-GPT全模块配置与解析](https://img-blog.csdnimg.cn/9ae4a562156b4e06ba372772d8cdcb74.png)