文章目录
- 前言
- ICU
- IcuChannel
- IcuChannelId
- IcuDefaultStartEdge
- IcuMeasurementMode
- IcuSignalType
- IcuWakeupCapability
- 子配置项
- IcuSignalMeasurement
- IcuSignalMeasurementProperty
- IcuDutycycleBufferMarker
- IcuOptionalApis
- IcuGetDutyCycleValuesApi
- IcuSetModeApi
- IcuSignalMeasurementApi
- PWM采集使用示例
- 总结
前言
在上一篇文章中介绍了GTM中TIM的配置使用Autosar MCAL-GTM之定时输入TIM,本节继续介绍PWM输入信号采集的最上层模块ICU。
ICU
ICU(Input Capture Unit)输入捕获模块,一个功能为采集PWM信号(占空比和频率)
ICU属于Autosar标准中的模块,规范中定义了其必须的一些配置项。
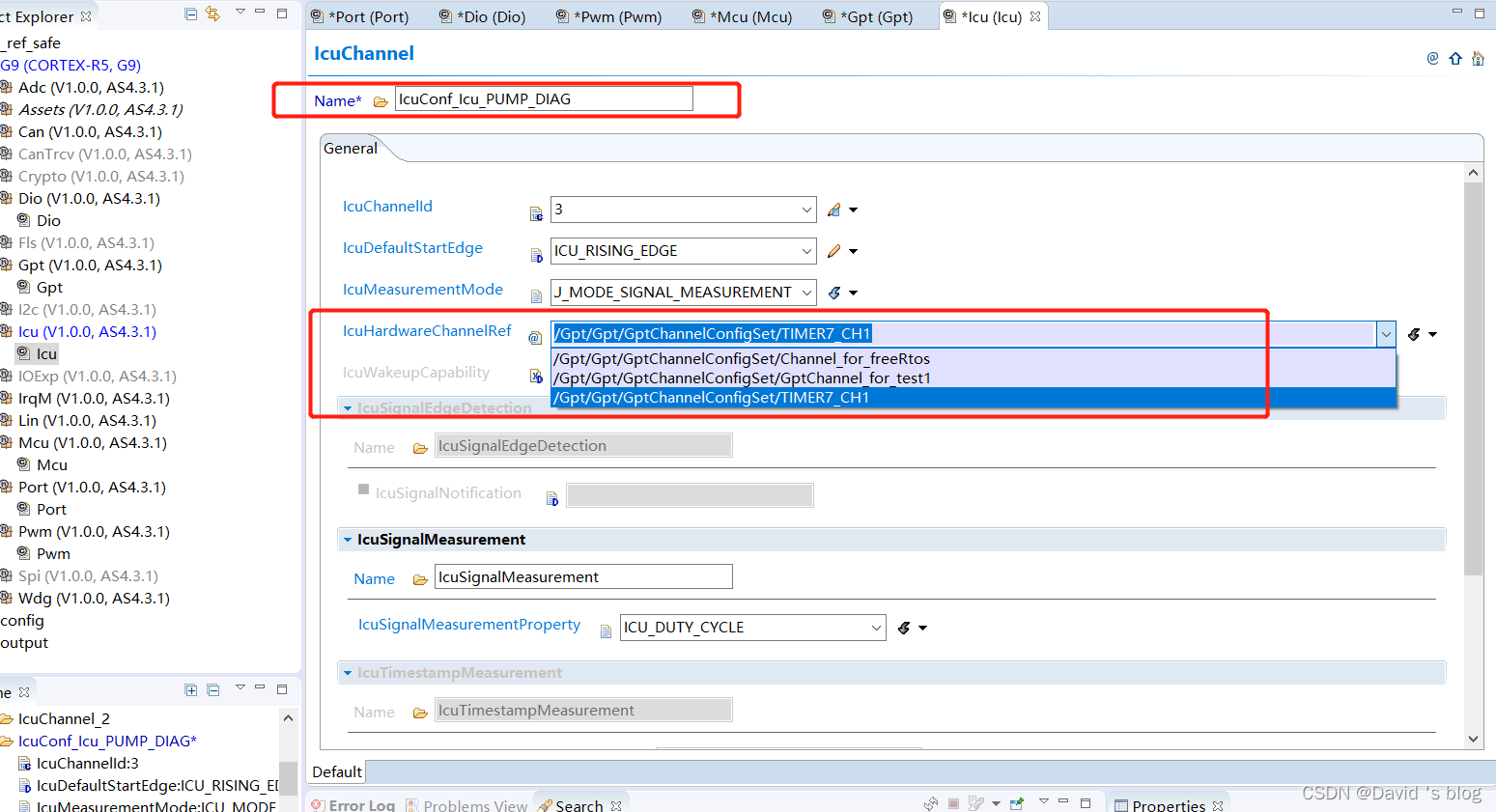
IcuChannel

IcuChannelId

cfg中配置Channel id:
Channel ICU通道Id。此值将分配给IcuChannel short name.

cfg中配置short name:

IcuDefaultStartEdge
如果没有通过调用服务Icu_SetActivationCondition()配置的激活边缘,则为该通道配置默认激活边缘。
当测量模式为“IcuSignalMeasurement”且设置了“DutyCycle”或“Period”属性时,此处配置的边缘将被用作默认周期起始边缘。

三个选项:
ICU_RISING_EDGE:上升沿
ICU_FALLING_EDGE:下降沿
ICU_BOTH_EDGES:上升沿和下降沿
cfg中配置:

IcuMeasurementMode
该配置项也是Autosar中的标准配置项


ICU_MODE_EDGE_COUNTER:该通道用于计算通过调用服务Icu_SetActivationCondition()配置的边沿。
以下API服务支持该模式:
- Icu_EnableEdgeCount()
Icu_DisableEdgeCount() - Icu_GetEdgeNumbers()
- Icu_ResetEdgeCount()
该模式只能在IcuEdgeVountApi打开的情况下配置
ICU_MODE_SIGNAL_EDGE_DETECT:通道用于检测通过调用服务Icu_SetActivationCondition()配置的边沿。
以下API服务支持此模式:
* Icu_EnableNotification()
* Icu_DisableNotification()
* Icu_GetInputState()
ICU_MODE_SIGNAL_MEASUREMENT:通道用于测量各种可配置边之间的不同时间。
周期开始边缘的配置由配置完成,不能在运行时更改。
以下API服务支持此模式:
* Icu_GetTimeElapsed()
* Icu_GetDutyCycleValues()
* Icu_GetInputState()
此模式只能在以下情况下配置以下开关之一设置为“true”:
* IcuGetDutyCycleValuesApi
* IcuGetTimeElapsedApi
此处通过Icu_GetDutyCycleValues函数来获取测量PWM的占空比信息
ICU_MODE_TIMESTAMP:通道用于捕获边缘上的计时器值,这些值是通过调用服务Icu_SetActivationCondition()配置的。
以下API服务支持这种模式:
* Icu_StartTimestamp()
* Icu_StopTimestamp ()
* Icu_GetTimestampIndex()
这种模式只能在配置IcuTimeStampApi开启后才有效
cfg中配置:

IcuSignalType
信号安全等级QM or ASIL
cfg中配置:

IcuWakeupCapability

关于该通道的唤醒能力的信息。
true:通道能够唤醒。
false:通道不具备唤醒能力
cfg中配置:

子配置项
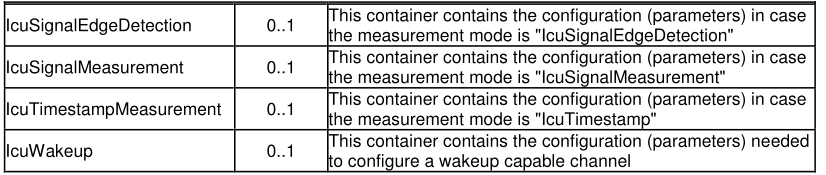
IcuSignalEdgeDetection:
如果测量模式是“IcuSignalEdgeDetection”,则此容器包含配置(参数)
IcuSignalMeasurement:如果测量模式为“IcuSignalMeasurement”,则此容器包含配置(参数)
IcuTimestampMeasurement:如果测量模式是“IcuTimestamp”,则此容器包含配置(参数)。
IcuWakeup:此容器包含配置支持唤醒通道所需的配置(参数)
本次MeasurementMode配置的为ICU_MODE_SIGNAL_MEASUREMENT,所以需要配置一个子配置项IcuSignalMeasurement
IcuSignalMeasurement

IcuSignalMeasurementProperty

配置在模式为“IcuSignalMeasurement”的情况下可以测量的属性
ICU_DUTY_CYCLE:通道被配置为读取计算占空比(激活时间和周期时间)所需的值。
ICU_HIGH_TIME:通道被配置为读取经过的信号高时间
ICU_LOW_TIME:配置的通道用于读取运行信号低时间
ICU_PERIOD_TIME:通道被配置为读取经过的信号周期时间
cfg中配置ICU_DUTY_CYCLE对应ICU_ACTIVE_TIME:

IcuDutycycleBufferMarker
该配置项不是Autosar的标准配置,目前没有用到。
以上关于通道的配置就完了。下面需要配置可选的API函数
IcuOptionalApis
API函数在Autosar规范文档中显示的很清楚,本文只介绍和PWM采集相关的函数
IcuGetDutyCycleValuesApi

通过Icu_GetDutyCycleValues() 函数来获取占空比和频率
如果IcuSignalMeasurementApi==false,此开关也应设置为false。
cfg配置:

IcuSetModeApi

通过Icu_SetMode() 函数设置ICU模式
cfg配置:

IcuSignalMeasurementApi

通过Icu_StartSignalMeasurement()开始信号测量,通过Icu_StopSignalMeasurement()停止信号测量。
cfg配置:

其他配置项对于PWM测量没有太大影响,不再介绍。
PWM采集使用示例
初始化时使用SetMode函数设置模式为Normal,并对需要测量的通道设置为开始测量
Icu_17_GtmCcu6_SetMode(ICU_MODE_NORMAL);Icu_17_GtmCcu6_StartSignalMeasurement(IcuConf_IcuChannel_IcuChannel_1);
周期运行函数中使用GetDutyCycleValues获取结果
Icu_17_GtmCcu6_GetDutyCycleValues(IcuConf_IcuChannel_IcuChannel_1,&PWM_Data);
返回的结果PWM_Data为一个结构体:
typedef struct
{/* To store ActiveTime for GetDutyCycles API.*/Icu_17_GtmCcu6_ValueType ActiveTime;/* To store PeriodTime for GetDutyCycles API.*/Icu_17_GtmCcu6_ValueType PeriodTime;/* Buffer marker value */ Icu_17_GtmCcu6_ValueType BufferMarker;
}Icu_17_GtmCcu6_DutyCycleType;
第一个参数为有效电平时间,第二个参数为周期,由这两个参数即可计算出占空比duty= ActiveTime/PeriodTime
同时,可以得到PWM频率f=1/PeriodTime
PeriodTime并非真实时间,而是一个计数,需要转化为真实时间,例如我们在之前设置的PWM采集的频率为10MHz,PeriodTime计数为12500,则实际的周期为12500/10000000=0.00125,则测量的PWM频率f=1/0.00125=800Hz.
总结
以上,关于PWM采集频率和占空比的部分就介绍完了。若想得到精度高的占空比,需要尽可能的提高采集的频率,或者测量的频率比较低,这样得到的占空比的精度也是比较高的。
若你觉得本文对你有帮助,欢迎点赞,关注,收藏,转发~~~
你的鼓励是对小弟的最大支持~~~
建了一个WX公众h,《汽车电子学习笔记》感兴趣可以关注一下~~~文章都会同步更新~



![TC397 EB MCAL开发从0开始系列 之 [1.0]-MCAL结构及Demo介绍](https://img-blog.csdnimg.cn/75d3593ef5cc41ad8151485fc8bb69d0.png#pic_center)


![[ 搞一点AutoSar ]基于EB的MCAL-GPT全模块配置与解析](https://img-blog.csdnimg.cn/9ae4a562156b4e06ba372772d8cdcb74.png)