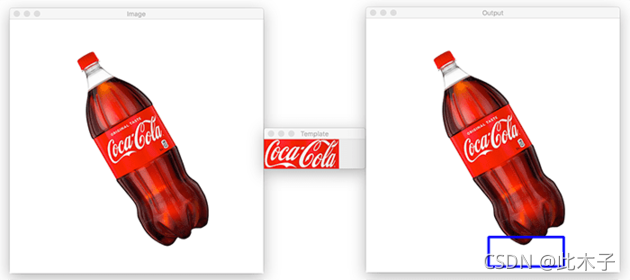
模板匹配就是在大图中找小图,也就说在一幅图像中寻找另一幅模板图像的位置。
案例来源于傅老师。
模板匹配的操作方法是将模板图像B在图像A上滑动,遍历所有像素以完成匹配。
工作原理:在带检测图像上,从左到右,从上向下计算模板图像与重叠子图像的匹配度,匹配程度越大,两者相同的可能性越大。
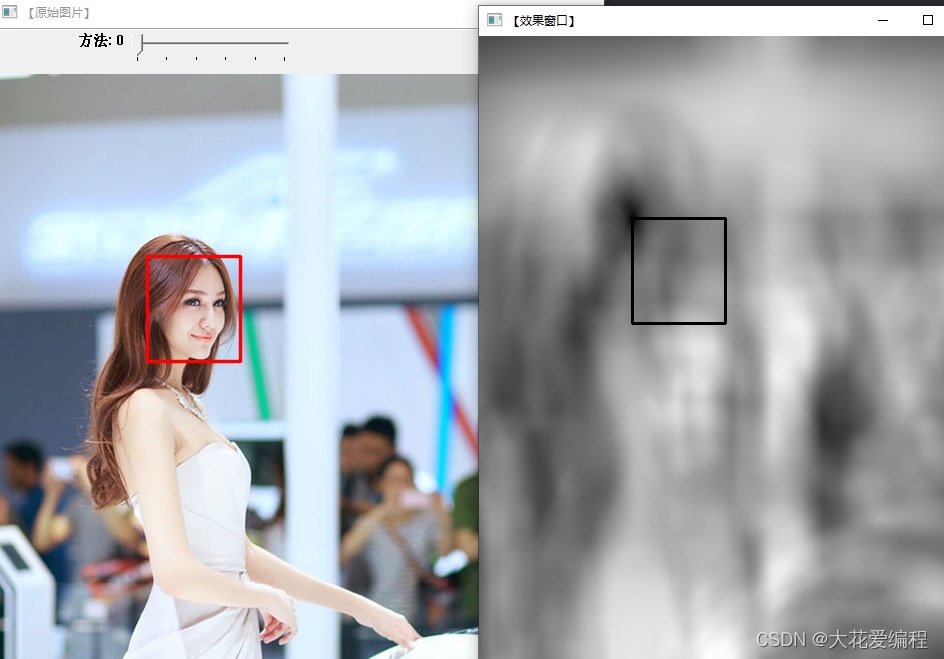
局限性: 它只能进行平行移动,若原图像中的匹配目标发 生旋转或大小变化,该算法无效。

模板匹配是使用函数cv2.matchTemplate实现的,具体为:
result = cv2.matchTemplate(image, template,method)
Result:运行结果
Image:待处理图像
Template:模板图像
Method:要采取的方法
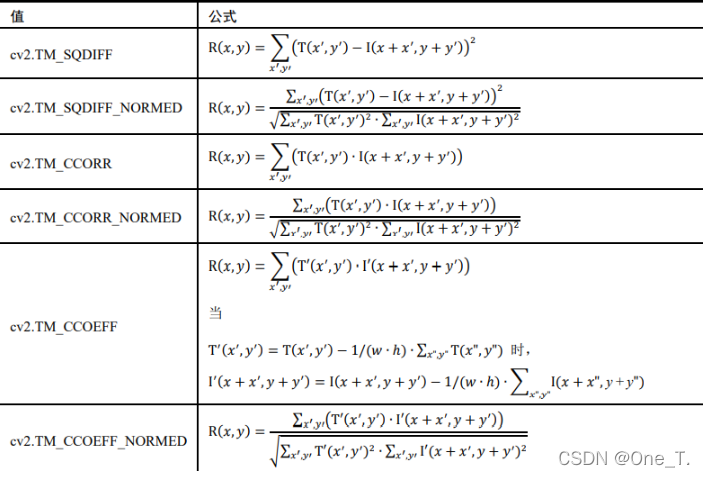
method:匹配方法,有以下6种
| 差值平方和匹配 | CV_TM_SQDIFF |
| 标准化差值平方和匹配 | CV_TM_SQDIFF_NORMED |
| 相关匹配 | CV_TM_CCORR |
| 标准相关匹配 | CV_TM_CCORR_NORMED |
| 相关系数匹配 | CV_TM_CCOEFF |
| 标准相关系数匹配 | CV_TM_CCOEFF_NORMED |
查找最值(极值)与最值所在的位置,可以使用cv2.minMaxLoc函数实现,具体为:
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(src)
import cv2
import numpy as np
#Matplotlib是RGB
import matplotlib.pyplot as plt
%matplotlib inline #定义显示图片的函数,避免重复代码
def cv_show(name, img):cv2.imshow(name, img)cv2.waitKey()cv2.destroyAllWindows()#读取模板图片
template = cv2.imread("yinhua.png")
# cv_show("template",template)
img = cv2.imread("yinhua2.png")
# cv_show("img", img)
#获取到我们模板的大小h,w
h, w = template.shape[:2]
#开始模板匹配过程(采用计算归一化平方不同,计算值越接近0,越相关)
res = cv2.matchTemplate(img, template, cv2.TM_SQDIFF_NORMED)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
top_left = min_loc
bottom_right = (top_left[0] + w, top_left[1] + h)
#画出检测到的部分
imgcpy = img.copy()
cv2.rectangle(imgcpy, top_left, bottom_right, 255, 2)
#因为matplotlib显示为RGB图像,做一次色彩空间空间转换
imgcpy = cv2.cvtColor(imgcpy, cv2.COLOR_BGR2RGB)
plt.imshow(imgcpy, cmap='gray')
plt.show()

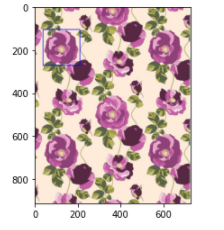
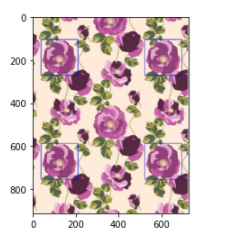
实践:检测多个印花
函数cv2.minMaxLoc()只能够找出最值,无法给出所有匹配区域的位置信息。所以,要想匹配多个结果,使用函数cv2.minMaxLoc()是无法实现的,需要利用阈值进行处理。
#读取模板图片
template = cv2.imread("yinhua.png")
# cv_show("template",template)
img = cv2.imread("yinhua2.png")
#获取到我们模板的大小h,w
h, w = template.shape[:2]
#开始模板匹配过程(采用计算归一化平方不同,计算值越接近0,越相关)
res = cv2.matchTemplate(img, template, cv2.TM_SQDIFF_NORMED)
threshold = 0.01
loc = np.where(res<=threshold)
for pt in zip(*loc[::-1]):cv2.rectangle(img, pt, (pt[0] + w, pt[1] + h), 255, 1)
#因为matplotlib显示为RGB图像,做一次色彩空间空间转换
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
plt.imshow(img, cmap='gray')