Es 模糊查询的方式
要求:
Es查询:
查询工单信息, 输入 “测试”,查出 form_name 为字段中有查询出含有符合内容的数据
match:分词模糊查询:
比如“Everything will be OK, All is well”,会被分词一个一个单词(不是单个字母)
{"from": 0,"size": 20,"query": {"bool": {"should": [{"term": {"form_name": "will"}}]}}}
match_phrase :短语模糊查询
match_phrase是短语搜索,即它会将给定的短语(phrase)当成一个完整的查询条件。
比如查询 “Everything will”,会当成一个完整的短语进行查询, 会查出含有该查询条件的内容。
GET /basic_index*/_search
{"from": 0,"size": 20,"query": {"bool": {"should": [{"match": {"form_name": "Everything will"}}]}}}
如果是查询单个字母,match就不管用了,那该如何处理呢?
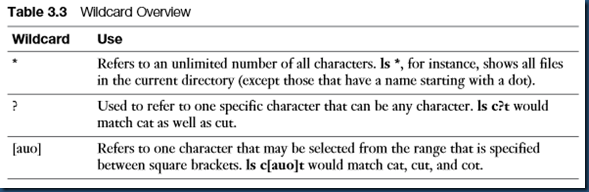
wildcard:通配符模糊查询:
| ? | 匹配任意字符 |
| * | 匹配0个或多个字符 |
GET /basic_index*/_search
{"size": 20,"from": 0,"query": {"bool": {"should": [{"wildcard": {"form_name": "*very*}}]}}
}
记录是存在的,但是没有查出来? 因为分词的影响,添加keyword 进行处理
{"wildcard": {"form_name.keyword": "*very*"}
}
Wildcard 性能会比较慢。如果非必要,尽量避免在开头加通配符 ? 或者 *,这样会明显降低查询性能
如果查询的内容非空,怎么处理? 直接用*
{"wildcard": {"form_name": "*"}
}
总结:
Es 模糊查询, 分词的用match; 短语的用match_phrase;查询任意的,用wildcard通配符,注意查询的内容是否分词,分词的添加keyword,查询非空的情况,用*。
关联文章: Es 精确查询