硬件电路设计
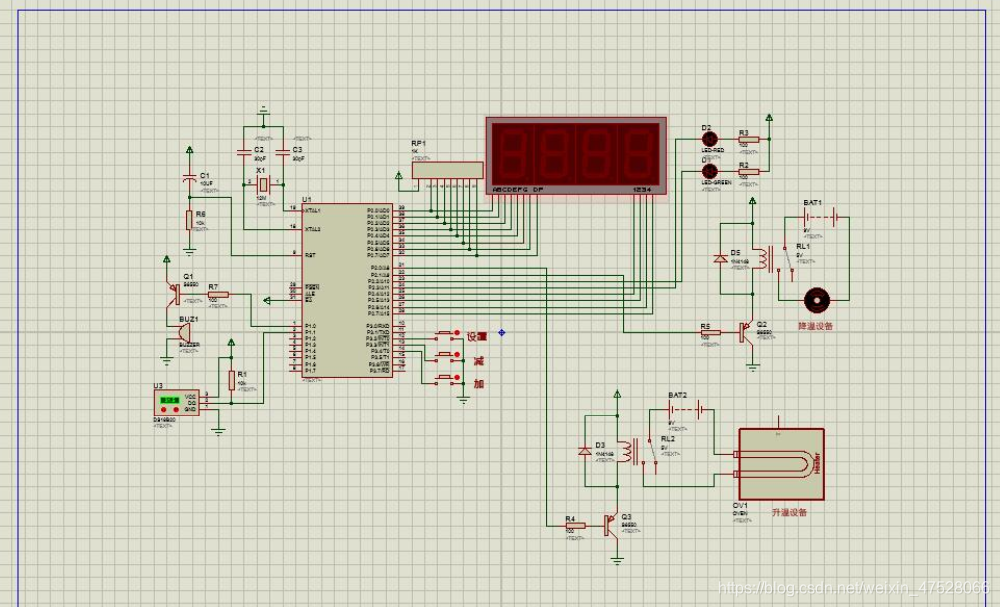
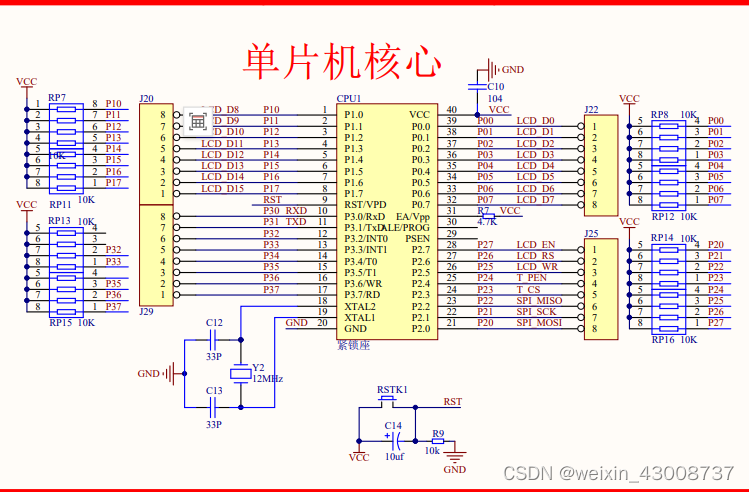
原理图:

仿真图:

单片机的时钟电路与复位电路设计
本系统采用STC系统列单片机,相比其他系列单片机具有很多优点。一般STC单片机资源比其他单片机要多,而且执行速度快;STC系列单片机使用串口对单片机进行烧写,下载程序较为方便;STC51单片机内部集成了看门狗电路;且具有很强抗干扰能力。
本系统采用内部方式的时钟电路和加电自复位的复位电路,如下图
3图4所示:

由于单片机P0口内部不含上拉电阻,为高阻态,不能正常地输出高/低电平,因而该组I/O口在使用时必须外接上拉电阻。
模数转换模块设计
3.3.1 ADC性能参数
目前的实时信号处理机要求ADC尽量靠近视频、中频甚至射频,以获取尽可能多的目标信息。因而,ADC的性能好坏直接影响整个系统指标的高低和性能好坏,从而使得ADC的性能测试变得十分重要,表征ADC性能的参数,由于尚无统一的标准,各主要器件生产厂家在其产品参数特性表中给出的也不完全一致。一般来说,可以分为静态特性和动态特性参数。
3.3.2 ADC静态特性
ADC的静态特性是指其与时间特性无关的特性,主要包括以下几类:
- 分辨率
ADC的分辨率定位为二进制末位变化1所需的最小输入电压与参考电压的比值,即ADC能够分辨的最小的模拟量的变化。 - 量化误差
量化电平定义为满量程电压(或满度信号值)UFSR与2的N次幂的比值,其中N位被数字化的数字信号的二进制位数。量化电平一般用Q表示。 - 全输入范围和动态范围
全输入范围是指允许输入模拟信号的最大值与最小值之差;动态范围是指全输入范围与ADC最小可分辨的量值之比。 - 偏置误差和增益误差
ADC的偏置误差定义为使最低位被置成“1”状态时ADC的输入电压与理论上使最低位被置成“1”状态时的输入电压之差。当偏置误差高速为零之后,输出为全1时对应的实际输入电压与理想输入电压之差。
3.3.3 ADC动态特性
高速ADC的动态特性是指输入为交变简谐信号时的性能技术指标,它是与ADC的操作速度有关的特性。其主要技术指标如下:
- 转换时间、采集时间
转换时间是指从信号开始转换到可获得完整的信号输出所用的时间,它是高速ADC的一项重要指标。
采集时间是指采样保持电路在采样模式下能够保证其在随之到来的保持模式输出在采样保持转换时,相对该时刻存在的输入电平之间的误差将会限制在一定的误差范围内所需的时间。 - 频率响应
它是冲击响应的傅立叶变换,其最佳表达方式是幅频与相频曲线,从系统辨识的角度看这是在频域对ADC动态线性特性的非参数模型描述。 - 动态积分非线性误差和动态微分非线性误差
动态积分非线性误差(INL)定义为在动态情况下(一般输入信号为正弦信号),ADC实际转换特性曲线之间的最大偏差。每个数码的偏差都是由那个数码的中心值来度量的。
动态微分非线性误差(DNL)定义为在动态情况下(一般输入信号为正弦信号),ADC实际转换特性的码宽(1LSB)与理想代码宽度之间的最大偏差,单位为LSB。为了保证ADC不失码,通常规定在25oC时最大DNL为 1/2LSB。 - 信噪比、信噪失真比和有效位数
信噪比(SNR)是信号电平的有效值与各种噪声(包括量化噪声、热噪声、白噪声等)有效值之比的分贝数。其中信号是指基波分量的有效值,噪声指奈奎斯特频率以下的全部非基波分量的有效值(除谐波分量和直流分量外)。 - 小信号带宽和全功率带宽
ADC的模拟带宽是指输入扫描频率基波在ADC输出端用FFT分析得到的基波频谱下降到3dB处的带宽(不考虑谐波失真和噪声影响)。根据输入信号幅值不同,模拟带宽又可以分为小信号带宽(SSBW,一般指1/10满量程)和全功率带宽(FPBW,指满量程)。
3.3.4 ADC性能测试
ADC测试方法主要有两种:模拟方法和数字方法。前者是将A/D采集的数字信号经D/A转换位模拟信号再用传统的测试方法对其进行测试,优点是易于理解,缺点是许多A/D采集卡本身不带D/A,即或有,D/A的性能也将影响A/D指标的测试;
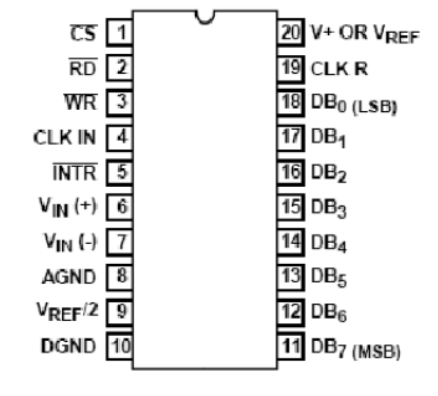
3.3.5 常用ADC芯片概述
A/D转换器是用来通过一定的电路将模拟量转变为数字量。模拟量可以是电压、电流等电信号,也可以是压力、温度、湿度、位移、声音等非电信号。但在A/D转换前,输入到A/D转换器的输入信号必须经各种传感器把各种物理量转换成电压信号。

程序
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
#include <intrins.h>//数码管段选定义 0 1 2 3 4 5 6 7 8 9
uchar code smg_du[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e,0xff}; //断码
//数码管位选定义
uchar code smg_we[]={0xef,0xdf,0xbf,0x7f};
uchar dis_smg[8] = {0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8};
uchar smg_i = 3; //显示数码管的个位数sbit SCL=P2^0; //SCL定义为P1口的第3位脚,连接ADC0832SCL脚
sbit DO=P2^1; //DO定义为P1口的第4位脚,连接ADC0832DO脚
sbit CS=P2^2; //CS定义为P1口的第4位脚,连接ADC0832CS脚sbit key1 = P2^3;
sbit key2 = P2^4;
uchar nw_can ; // 内外电压的选择 /***********************1ms延时函数*****************************/
void delay_1ms(uint q)
{uint i,j;for(i=0;i<q;i++)for(j=0;j<120;j++);
}/***********************小延时函数*****************************/
void delay_uint(uint q)
{while(q--);
}/***********读数模转换数据********************************************************/
//请先了解ADC0832模数转换的串行协议,再来读本函数,主要是对应时序图来理解,本函数是模拟0832的串行协议进行的// 1 1 0 通道// 1 1 1 通道
unsigned char ad0832read(bit SGL,bit ODD)
{unsigned char i=0,value=0,value1=0; SCL=0;DO=1;CS=0; //开始SCL=1; //第一个上升沿 SCL=0;DO=SGL;SCL=1; //第二个上升沿SCL=0;DO=ODD;SCL=1; //第三个上升沿SCL=0; //第三个下降沿DO=1;for(i=0;i<8;i++){SCL=1;SCL=0; //开始从第四个下降沿接收数据value<<=1;if(DO)value++; }for(i=0;i<8;i++){ //接收校验数据value1>>=1;if(DO)value1+=0x80;SCL=1;SCL=0;}CS=1;SCL=1; if(value==value1) //与校验数据比较,正确就返回数据,否则返回0 return value;return 0;
}/***********************数码显示函数*****************************/
void display()
{uchar i;for(i=0;i<smg_i;i++){ P1 = 0xff; //消隐 P3 = smg_we[i]; //位选P1 = dis_smg[i]; //段选 delay_1ms(1); }
}
/******************按键*********************/
void key()
{if(key1 == 0){if(key1 == 0){nw_can = 0; //板子上可调电阻电压 }}if(key2 == 0){if(key2 == 0){nw_can = 1; //板子上可调电阻电压 }}
}void main()
{uchar i;uint temp;while(1){key(); //按键程序display(); //数码管显示函数if(i % 30 == 0) //循环30次{ if(nw_can == 0) temp = ad0832read(1,0); //循环255个周期读取一次0832,因CPU运行比较快,没必要每次循环都去读取,选择通过CH0输入 else temp = ad0832read(1,1); //循环255个周期读取一次0832,因CPU运行比较快,没必要每次循环都去读取,选择通过CH0输入 temp = temp * 100 / 255 * 4.5;dis_smg[2]=smg_du[temp/100] & 0x7f; //得到百位 dis_smg[1]=smg_du[temp/10%10]; //十位dis_smg[0]=smg_du[temp%10]; //个位 ADC0832为8位ADC,数值为0~255,我们将其分开放入l_tmpdate数组中显示}i++;}
}.
原文:http://www.jh-tec.cn/archives/6202
.