基于51单片机+超声波模块的避障小车(源码+原理图+Protel仿真)
- 一、功能
- 二、模块
- 2.1、电机驱动模块
- 2.2、超声波模块
- 三、程序代码
- 四、PCB原理图
一、功能
设计一辆利用超声波传感器来实现避障功能的小车,使小车对其运动方向受到的阻碍作出各种躲避障碍的动作。
二、模块
2.1、电机驱动模块
 模块原理图:
模块原理图:
 模块使用说明:
模块使用说明:

2.2、超声波模块
 工作原理:
工作原理:

使用说明:

注意超声波的测量范围是2cm~400cm,精度大约为3mm.
三、程序代码
main.c 文件
#include <reg52.h> //52芯片配置文件
#include <intrins.h> //包含nop等系统函数
#include "bst_car.h" unsigned char disbuff[4]={0,0,0,0};//用于分别存放距离的值0.1mm、mm、cm和m的值unsigned int time=0;//用于存放定时器时间值
unsigned long S=0;//用于存放距离的值
bit flag =0; //量程溢出标志位
char a=0;//延时函数
void delay(unsigned int xms)
{unsigned int i,j;for(i=xms;i>0;i--) //i=xms即延时约xms毫秒for(j=112;j>0;j--);
}void Delay10us(unsigned char i) //10us延时函数 启动超声波模块时使用
{ unsigned char j;
do{ j = 10; do{ _nop_(); }while(--j);
}while(--i);
} void StartModule() //启动超声波模块
{TX=1; //启动一次模块Delay10us(2);TX=0;
}void Forward(void)//前进
{IN2=1;IN3=1;IN1=0;IN4=0;
}void Stop(void) //停车
{IN1=0; IN2=0;IN3=0;IN4=0;
}void back(void) //后退
{IN1=1; IN2=0;IN3=0;IN4=1;
}
void Turn_Right(void) //向右旋转
{IN1=0; IN2=1;IN3=0;IN4=1;}/********距离计算程序***************/
void conut1(void)
{time=TH1*256+TL1;TH1=0;TL1=0;//此时time的时间单位决定于晶振的频率,外接晶振为11.0592MHZ//那么1us声波能走多远的距离呢?1s=1000ms=1000000us // 340/1000000=0.00034米//0.00034米/1000=0.34毫米 也就是1us能走0.34毫米//但是,我们现在计算的是从超声波发射到反射接收的双路程,//所以我们将计算的结果除以2才是实际的路程S=time*0.17+10; //此时计算到的结果为毫米,并且是精确到毫米的后两位了,有两个小数点
}void Conut(void)
{conut1();if((S>=5000)||flag==1) //超出测量范围{a=0; flag=0;}else{disbuff[0]=S%10;disbuff[1]=S/10%10;disbuff[2]=S/100%10;disbuff[3]=S/1000;}//========避障部分===========================================if(S<=240) 刹车障碍物距离 跟车速有关 可更改{ a++;if(a>=2){a=0;Stop();back(); //后退缓冲delay(230);// 后退缓冲时间 跟车速有关 可更改B:Turn_Right();delay(50); /// 旋转角度 跟环境复杂程度有关 可更改Stop();delay(100); 旋转顿挫时间 视觉效果 可更改StartModule(); while(RX==0);TR1=1; //开启计数while(RX); //当RX为1计数并等待TR1=0; //关闭计数conut1();if(S>340) 可直行方向无障碍物距离 跟环境有关 可更改{Turn_Right();delay(90); Stop(); //微调前进方向 避免车宽对前进影响delay(200); Forward();} else{goto B; //若没转到空旷方向 回到B点 继续旋转一次}}else{Forward(); //无障碍物 直行}}else{a=0;Forward(); //无障碍物 直行}//=======================================}/********************************************************/
void zd0() interrupt 3 //T0中断用来计数器溢出,超过测距范围
{flag=1; //中断溢出标志RX=0;
}/********超声波高电平脉冲宽度计算程序***************/
void Timer_Count(void)
{TR1=1; //开启计数while(RX); //当RX为1计数并等待TR1=0; //关闭计数Conut(); //计算}
/********************************************************/
void keyscan(void) //按键扫描函数
{A: if(K4==0) //判断是否有按下信号{delay(10); //延时10msif(K4==0) //再次判断是否按下{FM=0; //蜂鸣器响 while(K4==0); //判断是否松开按键FM=1; //蜂鸣器停止 }else{goto A; //跳转到A重新检测}}else{goto A; //跳转到A重新检测}
}
/********************************************************/ /*************主程序********************/
void main(void)
{unsigned int a;delay(400); //启动等待,等LCM讲入工作状态delay(5);//延时片刻TMOD=TMOD|0x10;//设T0为方式1,GATE=1;EA=1; //开启总中断TH1=0;TL1=0; ET1=1; //允许T0中断keyscan() ; //按键扫描while(1){RX=1;StartModule(); //启动模块for(a=951;a>0;a--){if(RX==1){Timer_Count(); //超声波高电平脉冲宽度计算函数}}}
} bst_car.h 文件
#ifndef __BSTCAR_H__
#define __BSTCAR_H__//小车驱动模块的IO设置
sbit IN1=P2^2;
sbit IN2=P2^3;
sbit IN3=P2^5;
sbit IN4=P2^6;
sbit EN1=P2^4;
sbit EN2=P2^7;//按键IO
sbit K4=P3^4;
sbit K3=P3^6;//蜂鸣器IO
sbit FM=P1^3;//红外循迹IO设置
sbit Left_1_led=P3^3; //循迹-左红外IO
sbit Right_1_led=P3^2; //循迹-右红外IO //红外避障
sbit Left_2_led=P3^4; //避障-左红外IO
sbit Right_2_led=P3^5; //避障-右红外IO //超声波IO定义
sbit TX=P3^0; //Trig 控制端
sbit RX=P3^1; //Echo 接收端#define Left_moto_go {IN1=0,IN2=1;} //左电机向前走
#define Left_moto_back {IN1=1,IN2=0;} //右电机向后走
#define Left_moto_Stop {EN1=0;} //左电机停止
#define Right_moto_go {IN3=1,IN4=0;} //右电机向前走
#define Right_moto_back {IN3=0,IN4=1;} //右电机向后走
#define Right_moto_Stop {EN2=0;} //右电机停止#endif
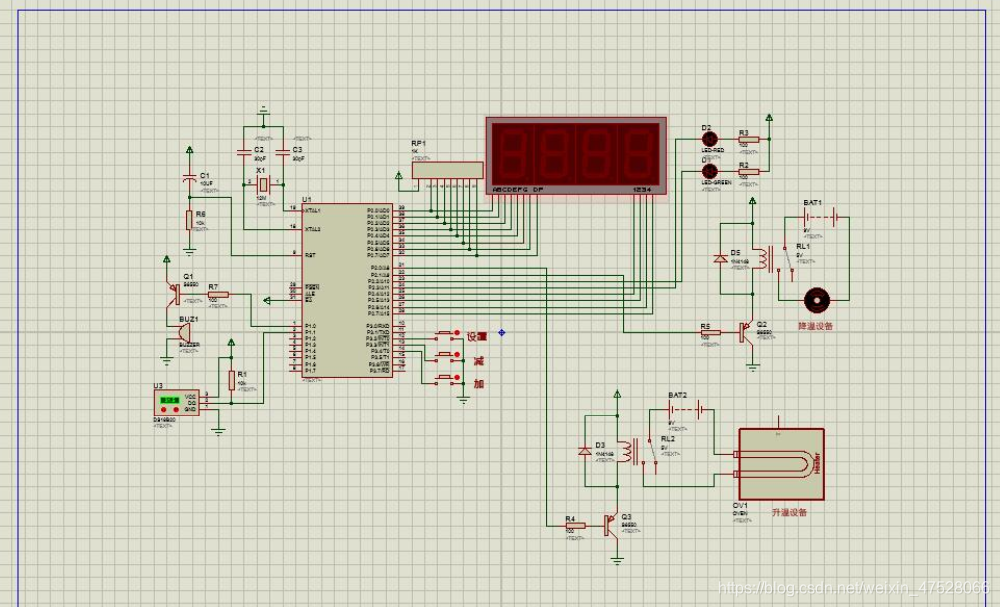
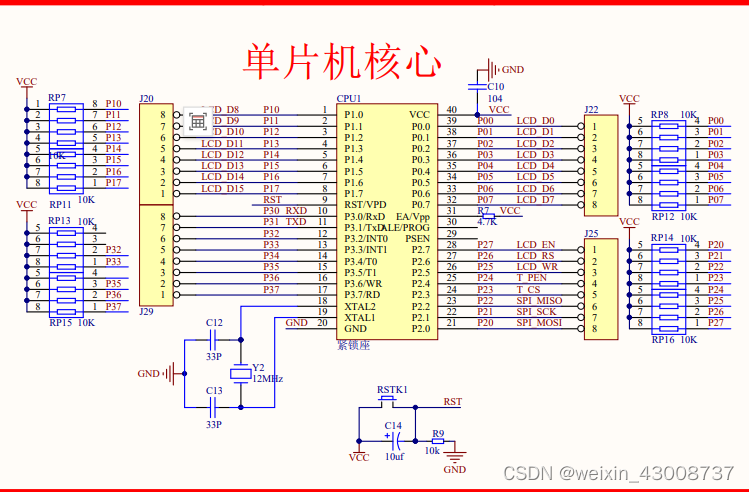
四、PCB原理图
4.1、原理图

4.2、元器件清单:

如果需要程序工程和仿真文件,可以关注公众号:Kevin的学习站,在后台回复“51避障小车” 即可获取,整理不易,但您的点赞、关注、收藏就是对我最大的鼓励!